光电稳瞄二级稳定系统性能分析及测试
2014-03-27胥青青雷霏霖徐飞飞谭名栋李红光
胥青青,纪 明,雷霏霖,徐飞飞,谭名栋,李红光
(西安应用光学研究所,陕西 西安 710065)
引言
机载光电稳瞄经过了不断发展已经逐渐由采用整体稳定技术的两轴四框架方式向采用二级稳定技术的多轴多框架方式发展[1]。这种采用二级稳定技术的光电稳瞄在现有陀螺稳定平台基础上,在光学传感器光路中增加高带宽高精度的快速反射镜[2-4],实现陀螺稳定平台对外界扰动进行初步隔离,采用粗精组合二级稳定技术对陀螺的残余误差信号进行信号融合处理,用于控制快速反射镜,实现瞄准线残余扰动的补偿,进而实现高精度的稳定。
带宽和隔离度是评价系统稳定能力的重要指标,本文通过建模和仿真的方法,对两轴两框架二级稳定系统进行深入分析,重点讨论系统的带宽和隔离度的对比。为了验证系统的最终性能,采用PSD探测器的稳定精度测试装置,验证二级稳定系统的先进性。
1 二级稳定系统模型
二级稳定系统组成示意图如图1所示,系统可划分为粗级稳定平台和精级快速反射镜平台。粗级稳定平台是传统的两轴四框架结构形式,精级快速反射镜组件置于粗级稳定平台的光具座上并安放在需要精确稳定的光学通道中,瞄准线(LOS)经过反射镜后进入光电传感器。粗稳平台有方位和俯仰2个轴,每个轴有2个框架,装有驱动电机和角度传感器,能够实现对扰动的初步隔离。精稳反射镜(FSM)形成方位和俯仰2个自由度。位于光路中的反射镜由精稳组件上的力矩装置驱动,相对粗稳平台作方位和俯仰运动,其相对粗稳平台的运动误差通过精稳组件上的误差敏感装置敏感,从而使精稳反射镜与粗稳平台作同步调整,相对粗稳平台进行第二级精确稳定[5-9]。
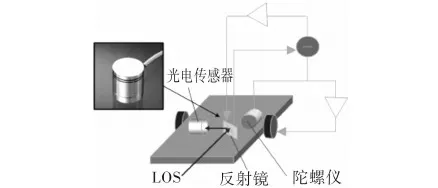
图1 二级稳定系统原理示意图Fig.1 Schematic of two-level stabilization system
二级稳定系统的模型包括传统的整体陀螺稳定平台模型和FSM模型,相关文献[10]已经给出了整体稳定模型。采用FSM后,运动关系如图2所示。
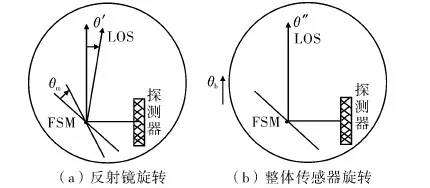
图2 反射镜/瞄准线转动关系Fig.2 Kinematics of mirror / LOS rotation
图2(a)中,因反射镜旋转θm,因此瞄准线旋转θ′=2θm;图2(b)中,传感器整体旋转θb,瞄准线旋转θ″=θb。瞄准线运动是图2所示2种运动的复合,所以瞄准线的运动方程为
θLOS=θ′+θ″=2θm+θb
(1)
结合传统稳定回路和二级稳定回路后的系统方位控制,框图如图3所示。
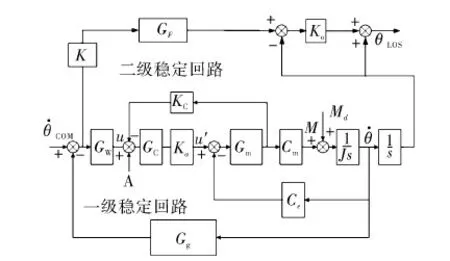
图3 二级稳定控制框图Fig.3 Control block diagram of two-level stabilization system
图3中,Gw为一级稳定回路控制器;Gc为电流环控制器;Ka为功率放大器增益;Gm为机电参数;Cm为力矩系数;Js为负载转动惯量;Ce为反电势系数;Gg为陀螺反馈;Kc为电流反馈;K为二级稳定控制器;GF为FSM闭环传递函数,其输入控制电压的和快速反射镜角度有对应关系,输出信号为反射镜角度;Ko为光学增益。
由图3控制框图可知,系统输出的瞄准线角度对输入的角速度命令传递函数为
(2)
系统输出的瞄准线角度对输入扰动传递函数为
(3)
为了实现二级稳定回路对于扰动Md的全补偿,可令:φd1=0
(4)
求得K=(1-Ko)/sGgGFKo。
为了对二级稳定系统和传统整体稳定系统的带宽和隔离度进行对比分析,求取传统陀螺稳定平台的闭环传递函数和扰动传递函数(令图3中的K、GF和Ko等于零即可),因此,传统陀螺稳定平台瞄准线对速度命令传递函数为
(5)
传统陀螺稳定平台瞄准线对扰动传递函数为
(6)
对比公式(3)和公式(6)可知,整体稳定的扰动传递函数(6)式由前向通道和反馈通道构成,系统输出和输入是线性响应关系,仅能实现扰动的部分隔离,而二级稳定的扰动传递函数(3)式,由于二级稳定控制器K可调,因此合理选择K和补偿频带,理论上可以实现对扰动Md的零输出,这也是二级稳定控制的核心所在。
2 仿真分析
本系统仿真模型的参数来源于控制系统静态设计,已知的参数有:力矩电机电阻8 Ω,电感11 mH,力矩系数0.6 Nm/A,反电势系数0.65 V/(rad/s),负载的转动惯量为0.4 kgm2,速率陀螺带宽100 Hz。将上述静态参数带入仿真模型后,进行动态的控制系统综合设计,稳定回路采用一阶控制网络,设计带宽为25 Hz,快速反射镜闭环带宽设计为280 Hz。
2.1 稳定带宽仿真
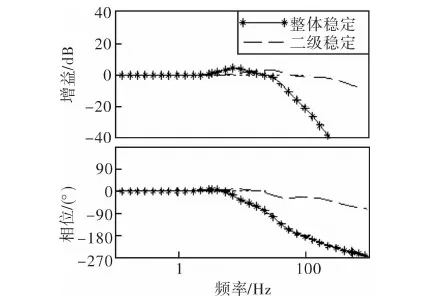
图4 带宽仿真图Fig.4 Bode for bandwidth
控制系统的带宽是评价系统性能的关键指标,由于本系统的特殊性,实际瞄准线在惯性空间中的运动情况已经无法通过传统的测量陀螺信号的方法来获得,因此也无法直接获得系统的带宽。为了能够得到精确的速率稳定回路带宽曲线,在仿真模型中对瞄准线的输出信号进行了微分和增益匹配处理,使其在物理意义上与输入速度命令信号一致,进而评价系统的性能。因此,稳定带宽仿真求取了输入速度命令和输出瞄准线角速度的传递函数,仿真曲线如图4所示,仿真显示二级稳定将系统带宽由原来的25 Hz提升到200 Hz,显著提升了陀螺稳定回路的带宽,有利于提升系统的稳定性能。
2.2 位置隔离度仿真
位置隔离度仿真求取了二级稳定后系统的位置输出对扰动输入的传递函数,仿真曲线如图5所示。二级稳定将1 Hz位置隔离度由原来的-56.3 dB提升至-90.1 dB,将10 Hz隔离度由原来的-61.5 dB提升至-75.2 dB,极大地提升了低频段的稳定效果。从仿真图中还可以看出,二级稳定系统对40 Hz以前的扰动均具有较好的隔离能力,同时对于高频隔离能力没有影响。

图5 隔离度仿真Fig.5 Bode for isolation
3 试验
为了测试二级稳定系统的稳定效果,采用高性能的PSD(position sensitive detectors)对瞄准线运动进行测量[11-12]。PSD能够连续准确给出入射光点在光敏面上的光学“重心”位置,是一种能测量光点在探测器表面上连续位置的光学探测器,具有较宽的光谱响应范围、高带宽和高分辫率、信号检测方便、价格较便宜等优点。探测器指标:尺寸27 mm×27 mm、精度2 μm、响应时间2 μs、响应光谱380 nm~1100 nm。
稳定精度测试原理如图6所示。在稳瞄光具座上安装小型激光器,光束和稳瞄瞄准线平行,光束通过FSM后出射,经过凹面镜反射会聚在PSD靶面,PSD靶面上光点在水平X方向和垂直Y方向的位移可表征瞄准线在方位和俯仰方向的转动特性,采用该原理,对2个方向的光点抖动量进行采集,通过数据分析和计算,最终获得稳瞄的稳定精度指标。若凹面镜焦距为F,瞄准线抖动角为θ, 则对应PSD 上的光斑会有x偏移, 两者关系:
x=F*tan2θ≈F*2θ
(7)
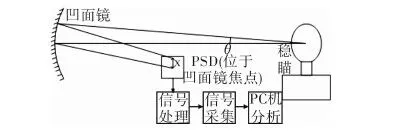
图6 测试系统Fig.6 Test system
为了测量实际系统的扰动隔离能力,实验采用激光器代替图1中的光电传感器,并对粗级稳定平台电流回路施加0.15 Nm的正旋扰动力矩用于模拟真实情况下的扰动力矩,完成了1 Hz~10 Hz的定频扰动试验,记录了测试系统输出的稳定精度,获得了稳定精度和隔离度对比(表1)。
试验结果显示,二级稳定将1 Hz位置隔离度提升至-73.1 dB,提升约20 dB;10 Hz提升至-66.4 dB,提升约8 dB;随着频率增加,隔离度提升能力下降,与仿真较为吻合。
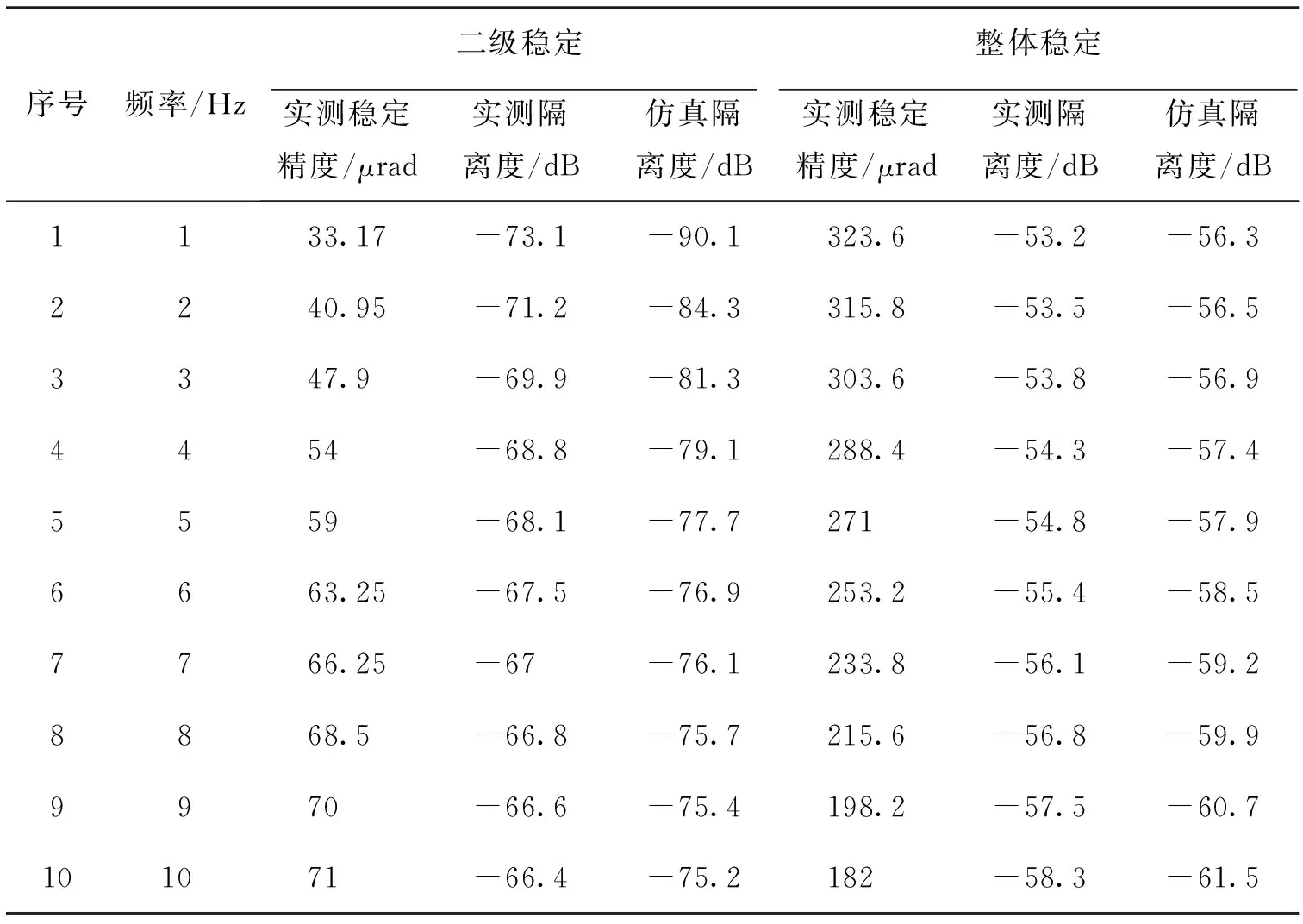
表1 实测稳定精度与隔离度
4 结论
试验过程所施加的扰动力矩包含摩擦和线扰动等力矩,一定程度上影响了最终稳定精度,使实测和仿真隔离度有所偏差,但是低频隔离能力提升了近20 dB,极大提升了稳定性能。二级稳定控制器对于控制效果至关重要,因此需要综合补偿频带、系统噪声和反射镜补偿能力等多种因素进行控制器的设计。
[1] Raytheon.Airborne imaging 2011 electro-optical infrared [M].US:Raytheon,2011.
[2] MASTEN M, STOCKUM L.Precision stabilization and tracking systems for acquisition, pointing and control applications[C].US:SPIE Optical Engineering Press, 1996.
[3] MASTEN M, HILKERT J.Electromechanical system configuration for pointing, tracking, and stabilization applications[J].SPIE, 1987, 779: 75-87.
[4] ALGRAIN M, POWERS R.Line-of-sight pointing accuracy-stabilityanalysis and computer simulation for small spacecraft[J].SPIE, 1996, 2739: 62-76.
[5] 纪明.基于控制通道融合的瞄准线组合稳定技术[J].火力与指挥控制,1999,24(4):38-41.
JI Ming.Line of sight combined stabilization technique based on control channel blend[J].Fire Control&Command Control,1999,24(4):38-41.(in Chinese with an English abstract)
[6] 纪明.武装直升机瞄准线粗/精组合二级稳定技术[J].航空学报,1997,18(3):291-293.
JI Ming. Line-of-sight coarse/fine combination two-level stabilization technique in armed helicopters[J].1997,18(3):291-293.(in Chinese with an English abstract)
[7] JENKINS S, HILKERT J. Line-of-sight stabilization using image motion compensation[J]. SPIE, 1989, 1111: 98-115.
[8] MASTEN M. Inertially stabilized platforms for imaging optical systems[J].IEEE CSM,2008,28:47-64.
[9] SUITE M R, BURRIS H R, MOORE C I.Fast steering mirror implementation for reduction of focal-spot wander in a long-distance free-space communication link[J].SPIE,2004,5160: 439-446.
[10] 张璟玥,纪明,王惠林.机载稳瞄控制系统模型及仿真分析[J]. 应用光学,2006,27(6):491-496.
ZHANG Jing-yue,JI Ming,WANG Hui-lin. Modeling and simulation of airborne stabilized sighting system[J]. Journal of Applied Optics, 2006,27(6):491-496. (in Chinese with an English abstract)
[11] 张安锋.光电稳定系统的稳定精度测试研究[D].长春:长春理工大学,2003.
ZHANG An-feng .Stabilization accuracy test of O-E stabilized system[D].Changchun:Changchun University of Science and Technology,2003.(in Chinese)
[12] 刘正云.PSD用于稳像仪稳像精度测试方法探讨[J].应用光学,1995,16(1):50-52.
LIU Zheng-yun.A method for testing the stabilizing accuracy of image stabilizer with PSD[J]. Journal of Applied Optics, 1995,16(1):50-52.(in Chinese with an English abstract)