单黑体温控的热成像仪MRTD野外在线自动检测技术研究
2014-11-08陈志斌刘羽翔侯章亚
陈志斌,宋 岩,张 超,刘羽翔,侯章亚
(军械工程学院 军械技术研究所,河北 石家庄050000)
引言
近年来红外热成像技术发展迅速,红外热成像设备几乎运用于各个领域。红外热成像设备技术含量高、结构精密、故障率较高,因此对红外热成像设备性能参数的计量检测就显得尤为重要。其中一个重要的参数是MRTD,MRTD定义为在确定的空间频率下,观察者在热像仪的显示屏上恰好能分辨出高宽比为7:1四杆靶目标图案时的目标和背景的温差,即为该空间频率下的最小可分辨温差。MRTD的传统测量方法是基于专业检测人员主观判断得到的,其结果受检测人员的影响较大。虽然目前也存在一些MRTD的客观测量方法[1-2],但这些检测方法操作繁琐且稳定性较差[3],在红外目标与背景的温差控制[4]、四杆靶目标与背景的选取、红外图像的采集与处理[5]等方面尚未实现完全的自动化,不能满足野外在线快速检测的需求。而且这些客观检测方法大多是在实验室环境下进行的,检测设备复杂,体积较大,需要光学平台,从准备工作到完成检测需要的时间较长,不适合野外在线检测。如果要做到质量体积小、精度有保证、操作很简便,目前还没有一种成熟的检测方法和检测设备。为解决以上问题,本文研究了基于单黑体目标与环境背景温差(以下简称“单黑体温差”)、精确控制的红外热像仪MRTD野外全自动检测的相关技术。
1 自动检测装置的总体设计
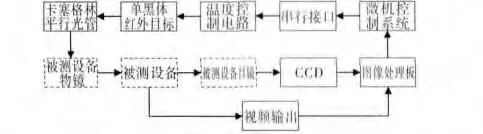
图1 总体结构及工作流程框图Fig.1 Overall structure and working process block diagram
要实现红外热像仪MRTD在野外环境下的全自动检测,在硬件设计上检测设备的体积及质量一定要小,便于装卸,能够适应野外复杂的地形变化,同时要保证在环境温度变化下红外温差的模拟精度。在软件设计上要使检测人员的操作尽量简单,人机工程好,自动化程度高,在实现快速检测的同时保证检测的精度。文中设计的红外热像仪MRTD检测设备体积及质量小,便携性好,适用于野外在线检测,软件设计实现了红外热像仪MRTD的全自动检测,其总体结构原理框图如图1所示。检测设备由单黑体热像靶标、温差控制电路、卡塞格林平行光管、CCD、图像采集卡、微机控制处理系统连接组成。其检测工作原理是:由微机控制系统控制温差控制电路,调节面源黑体的温度,使目标(四杆靶)与环境产生需要的温差,形成一组特定空间频率下的热目标源,无色差的同轴卡塞格林平行光管将热目标源投射到无限远处,模拟无限远目标进入被检测热成像仪的物镜,对于有视频输出接口的被测仪器,将视频接口与图像采集卡相连,直接将物镜输入的视频信息传给微机控制处理系统;对于没有视频输出接口的被测仪器,采用CCD采集被测热成像仪目视窗口的成像结果,然后由图像采集卡采集后输入到微机控制处理系统中,对输入的图像或视频信息进行相关处理并显示处理结果,从而完成对被检测热成像仪MRTD参数的全自动测量。
2 自动检测技术的硬件设计
实现红外热像仪MRTD的野外在线检测最突出的问题是在复杂多变的环境温度下保证红外靶标与背景的模拟温差精度。因此为了提高野外检测时模拟温差的控制精度和稳定度,在本检测系统中我们采用了单黑体温差控制技术来模拟目标与环境的温差。采用单个黑体有效地减小了测试系统的体积,同时用2个温度传感器分别探测环境背景和黑体目标的温度,提高了温差控制的环境适应性,保证了测量结果的精确度。其温差自动控制硬件设计原理框图如图2所示。
温控系统硬件主要由红外温差辐射源黑体、温度控制系统、红外靶标、温度传感器、微机控制处理系统等组成。其中面源黑体采用半导体制冷器件帕尔贴进行制冷和加热,面源黑体发射板采用硬铝材料制作,目标温度传感器安装在发射板顶部,背景温度传感器安装在靶标板上,微机控制处理系统通过串口RS232与温度控制系统进行通信,实现对温度的控制,温度控制系统为0.01℃级高精度调节器,具有两路模拟输出,输出1用于黑体升温控制,输出2用于黑体的降温控制。
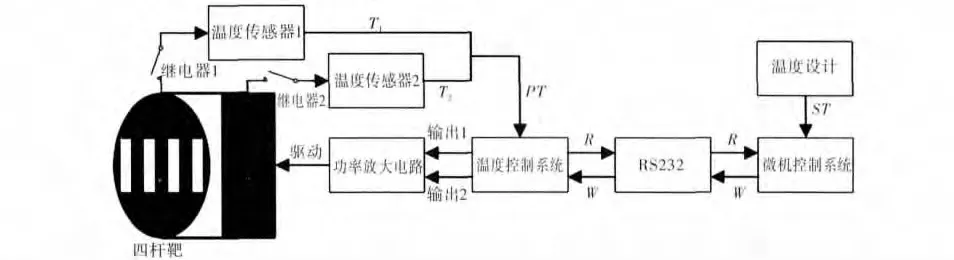
图2 模拟温差自动控制系统硬件设计原理框图Fig.2 Block diagram of simulated temperature automatic control system
单黑体温差控制原理:由微机控制处理系统给出初始温差设定值ST,在某一时刻t1继电器1接通温度传感器1,将四杆靶温度值T1送至温度控制系统,由其内部的单片机读取后保存,并把该温度值作为环境温度值。T1与温差设定值ST作加法运算得到T2=T1+ST,温控系统根据T2自动调节输出1或输出2的输出量,作为控温电路的输入信号,两路信号分别经过电压跟随器后,由减法运算电路进行输出1减输出2的运算,得到功率放大电路的控制信号,由功率放大器驱动帕尔贴升温或降温模拟目标的温度,此后继电器1和继电器2相继闭合打开,将目标与背景的当前温度值T1和T2传送至温控系统中得到当前温差值PT,温控系统根据设定温差ST与当前温差PT的差值自动调节输出量,进而控制功率放大电路对帕尔贴进行适量的升温和降温。温度传感器1不断地传递当前的环境温度,通过反馈调节控制面源黑体的温度,保证在环境温度变化的情况下目标与背景模拟温差的稳定性。通过采用单黑体控制技术模拟目标与环境的温差,可以有效地减小环境温度变化对检测结果的影响,保证MRTD的检测精度。
3 自动检测技术的软件设计
3.1 模拟温差与图像采集控制
实现红外热像仪MRTD的全自动快速检测,对模拟温差的自动控制以及图像的准确采集有着较高的要求,不仅需要分别实现模拟温差和图像采集的自动控制,而且需要两者相互配合,在恰当时间共同完成控制工作。它们的软件设计流程如图3所示。
为满足不同微机的串口通讯需求,程序可以自动识别微机所使用的串口号,并自动连接到对应的串口,与温控系统保持通信,同时打开对应的图像采集卡,实时地采集被测热像仪的目视成像结果。接着微机向温控系统发送通信码设置单黑体的温度差PT,然后设置一个定时器,每隔300 ms向温控系统发送通信码读取面源黑体的当前温度差值,这时在缓存区中有温控系统发送回来的响应数据,程序实时监控缓存区的内存状态,滤除掉不需要的数据,提取出单黑体的当前温度差值ST,并与设置的温差作比较得△T=|PT-ST|,根据温控系统的控制精度(0.01℃)以及多次计量标定,将阈值设置为0.05℃。
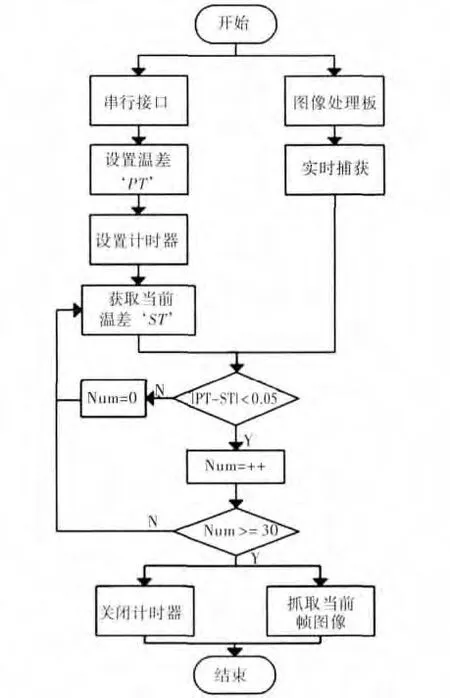
图3 温差控制与图像采集流程Fig.3 Process of temperature control and image capture
当ΔT<0.05℃时,计数器开启,Num 加1(Num为当前温差PT连续进入阈值范围内的次数),表明当前温差PT接近设置温差ST,如果当前温差PT连续30次在阈值范围内 (Num≥30),表明当前温差已经稳定在设置温差附近,此时程序立即关闭定时器,停止读取当前温度值并控制CCD采集当前一帧图像到缓存区,用以后续处理。当计数器Num开始计数后,如果Num<30,则Num值保持不变,继续读取当前温度差值PT,一旦PT超出了阈值范围,则立刻将计数器置零(Num=0),并返回继续读取当前温度差值,重复以上过程。Num计数器同时具有计时的功能,Num每加1代表稳定时间加300ms。
3.2 MRTD自动检测方法
在全自动检测中,我们采用CCD代替人眼来采集被测热像仪的目视成像结果,并将其积分时间调节到0.05s,与人眼大致相同,利用四杆靶目标区域与背景区域的灰度差来实现对四杆靶目标的分辨。
在软件设计时考虑到野外快速检测的需求,将初始温差设置为1.0℃,当实际温差稳定在1.0℃后程序控制CCD采集当前帧图像放入缓存区,对采集的图像进行分析处理,准确地提取出四杆靶目标以及背景区域,保存区域坐标,分别计算温差1.0℃下目标区域和背景区域的平均灰度值,得到两者的灰度差GrayD,根据CCD和热像仪的分辨能力以及人眼对灰度图像的敏感度,当GrayD<3时认为人眼无法分辨出四杆靶区域。如果被测热像仪的MRTD大于1.0℃,那么当实际温差稳定在1.0℃左右时,程序无法提取出四杆靶以及背景区域,此时直接输出检测结果“MRTD大于1.0℃”,表明被测热像仪的温差分辨性能较差。
当GrayD>3时,表明在温差1.0℃时可以分辨出四杆靶区域,为了缩短检测时间直接将下一个温差值设定0.5℃,然后分上下两段分别判断。当实际温差稳定在0.5℃左右后,采集当前温差图像并根据已得到的目标与背景区域计算灰度差GrayD。当GrayD<3时,表示在0.50℃时观察不到四杆靶图像,那么 MRTD可能是0.5℃、0.6℃、0.7℃、0.8℃、0.9℃中的任何一个,接着就设置温差为0.6℃,如果此时的GrayD>3,则输出被测热像仪的 MRTD为设置0.5℃时采集到的实际温差,否者设置温差为0.7℃,按照上面的方法依次向上设置温差,直到温差为0.9℃时结束。当设置温差为0.5℃且GrayD>3时,表示温差在0.5℃时仍然可以观察到四杆靶图像,那么MRTD小于0.5℃,接 着 设 置 温 差 为 0.4℃、0.3℃、0.2℃、0.1℃,即按照上面的方法依次向下设置温差,直到温差为0.1℃时结束,如果当温差为0.1℃时,GrayD仍然大于3,则输出“被测热像仪的MRTD优于0.1℃”。
3.3 四杆靶目标与背景区域的自动提取
实现热像仪MRTD的全自动测量,最重要的就是要准确地提取出四杆靶目标以及背景区域,然后利用目标与背景区域的灰度差来实现对MTRD参数的测量,四杆靶区域和背景区域提取的越精确,MRTD的检测结果越精确。同时为了实现在野外环境下的快速测量,最初的温差不能设置太大,否者从一个较大的温差降到检测需求的温差需要较长的等待时间,不符合快速检测的需要,为此在检测设备中我们设置初始最大温差为1.0℃,利用该温差下的红外成像结果提取出目标与背景的区域。
由于恶劣的外界环境条件和探测仪器本身固有的特性,与可见光图像相比红外图像普遍存在目标与背景对比度较差、边缘模糊、噪声较大等缺点,很大程度上影响了四杆靶区域提取的效果。因此为了准确地提取四杆靶目标区域以及背景区域,提高MRTD的检测精度,文中结合了线性滤波器与非线性滤波器的优点,提出了一种线性滤波与非线性滤波相结合的混合滤波算法,在实现对红外图像滤波的基础上,更好地保留了图像的边缘信息,图4所示为文中针对四杆靶形态特征采用的5像素×5像素滤波窗口,该滤波窗口被划分为4个区域(a)、(b)、(c)、(d),所划分区域中不包括待处理点本身,其中中心带○的像素点为待处理像素点,4个区域内像素点的灰度均值和方差分别记为meana、meanb、meanc、meand,δ2a、δ2b、δ2c、δ2d。
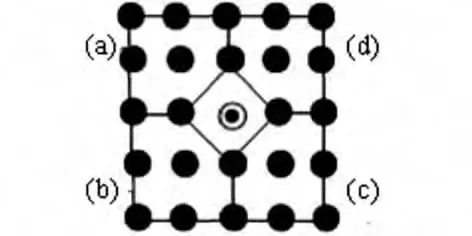
图4 5像素×5像素滤波窗口Fig.4 5*5 filtering window
该滤波算法是这样实现的:首先根据下式判断待处理点的噪声类型:

式中f(x,y)为待处理点的灰度值,如果满足(1)式,表明待处理点为脉冲噪声,如果满足(2)式表明为边缘点,其他情况属于平滑区域。
如果待处理点是脉冲噪声,则在以待处理点为中心的3像素×3像素邻域内进行中值滤波,将滤波后的值赋予待处理点,如下式中(3)所示;如果待处理点是边缘点,则将meana、meanb、meanc、meand、f(x,y)进行中值排序,将中值赋予待处理点,如下式(4)所示;如果待测点处于平滑区域,则对其进行加权均值滤波如下式(5)所示:

图5为CCD采集的红外热像仪目视结果,图6为使用文中提出的混合滤波后的效果图。经过滤波后图像中四杆靶区域被清晰地呈现出来,提取图像的灰度直方图如图7所示,通过观察发现直方图中存在明显的波谷,可以通过全局门限对滤波后的图像进行阈值分割。
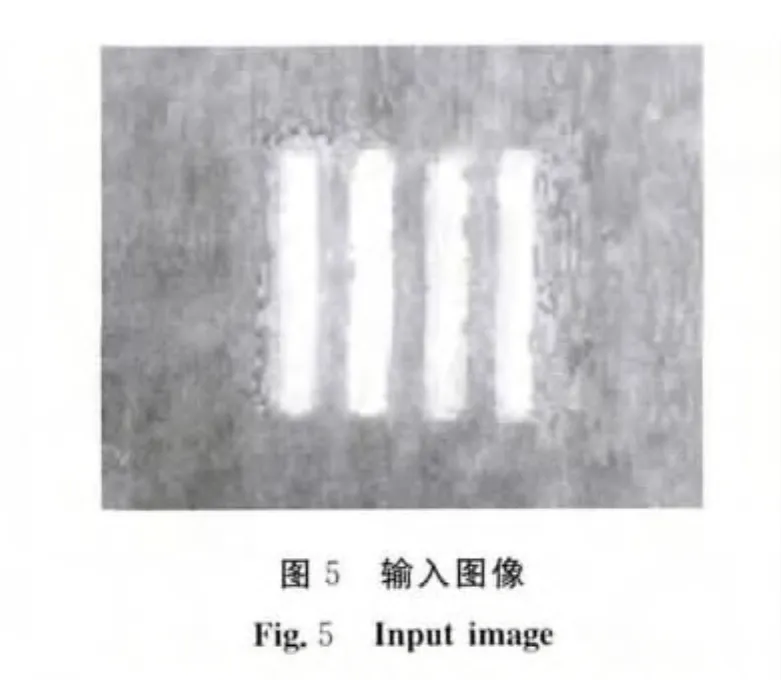
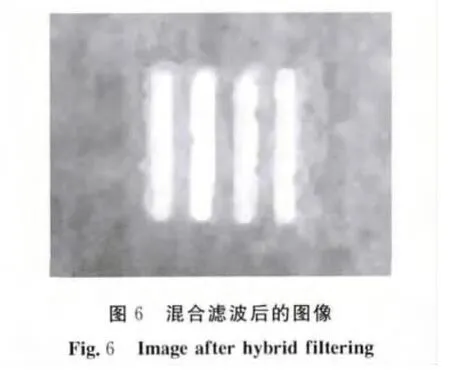

图7 图像的直方图Fig.7 Image's histogram
初始阈值选取为图像的平均灰度值,然后按照文献[6]中提出的方法不断叠加得出最终的全局门限,阈值分割后的图像如图8所示。

图8 阈值分割后的图像Fig.8 Image after threshold segmentation
可以看出在阈值分割后得到了大致的四杆靶的图像,但是在四杆靶的边缘还存在较多的毛刺和缺口,此时对图像进行形态学的开运算以消除小的毛刺并修复缺口。开运算即是先对图像用结构元素S腐蚀接着用同样的结构元素进行膨胀恢复。根据四杆靶的形态特征,选用3像素×1像素的长方形结构作为结构元素对图像进行开运算,图9显示了对图8的图像进行开运算后的结果。

图9 开运算结果Fig.9 Image after opening operation
由图像可以看出在开运算后得到了较为平滑和清晰的四杆靶图像,为了寻找四杆靶区域,需要对图像进行轮廓提取。提取方法:遍历开运算后图像中灰度值为255的点,当它的8领域灰度值都为255时则认为该点为内部点,将该点删除,如果该点的8领域中至少有一个为0时,则认为该点为轮廓点,保存下来继续检测下一个点。图10显示了图9中四杆靶的轮廓图像。为了防止滤波不完全造成的轮廓提取错误,在提取轮廓后进行筛选,计算每个轮廓的长度Lx,并求出所有轮廓的平均值Lave,如果Lx<|Lave-20|,则认为该轮廓不是四杆靶轮廓,予以删除。

图10 四杆靶轮廓Fig.10 Contour of four bars target
在进行检测时,我们设置初始温差为1.0℃,此时可能因为热像仪的性能问题,在温差为1.0℃时热像仪已经不能分辨出四杆靶,为防止程序在提取四杆靶目标与背景区域时报错,在筛选轮廓后进行轮廓数量的统计,如果轮廓数量大于4则程序继续执行,如果轮廓值小于4,则程序接续,输出信息“被测热像仪的MRTD>1.0℃”。
在确定了四杆靶的轮廓后,我们希望能够得到四杆靶的坐标位置以便在后面的处理中直接运用此区域。通过找出单个轮廓的最左、最右、最上、最下的4个坐标点,拟合出4个矩形区域,使它们分别刚好包含每个靶杆,通过4个矩形区域左上角顶点的坐标和矩形的长宽就可以得到4个矩形区域的准确坐标位置。然后取包含4个小矩形的大矩形区域(不包括4个小矩形区域)作为背景区域,如图11所示。在计算参数MRTD时,四杆靶区域以及与其邻近的背景区域时是最关心的对象,适当地控制大矩形的范围可以有效地减小背景区域的计算量,同时提高MRTD结果的准确性。
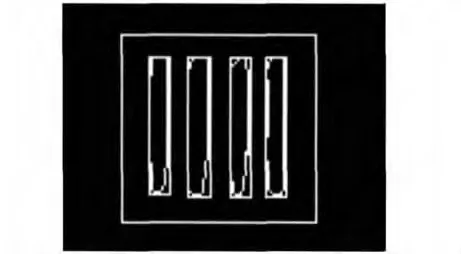
图11 目标与背景区域Fig.11 Area of target and background
4 实验结果分析
选用某型号的手持式红外热像仪进行实测实验,选取3组不同空间频率下的红外靶标板,分别用人眼观察法和本文提出的全自动检测方法进行了3次对比实验,实验结果数据如表1所示。
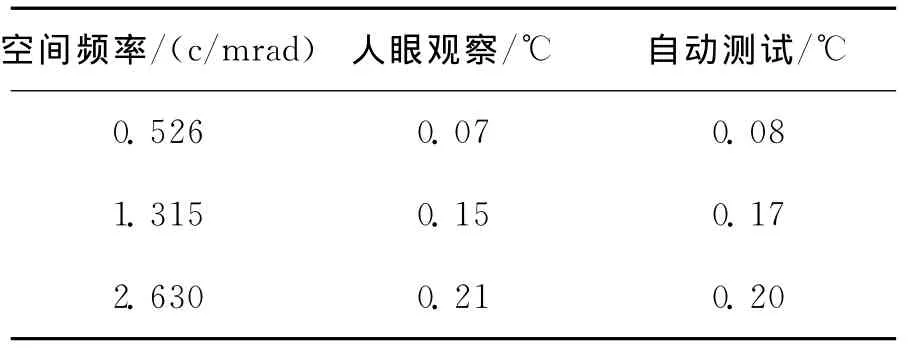
表1 不同空间频率下,人眼观察与全自动检测实验结果Table 1 Experimental results of eye observation and automatic test under different spatial frequencies
通过实验可知,本文提出的MRTD全自动检测方法测得的结果与人眼观察所得结果基本吻合,具有较好的准确性。
5 结论
分别从硬件设计和软件设计两个方面研究了红外热像仪MRTD在野外环境下全自动快速检测的关键技术,通过采用单黑体温差控制技术提高了设备的便携性和温差控制精度;通过结合CCD图像采集、串口通信、黑体控制以及图像处理等多项技术保证了温差控制与图像采集的全自动化与协调统一;采用新颖的混合滤波、阈值分割、形态学处理、轮廓提取与筛选的综合算法准确地提取出四杆靶目标与背景区域,实现了MRTD检测的全自动化;温差的分阶段设置较好地满足了MRTD快速检测的需求。本文方法仅能适用于野外在线检测时3种典型空间频率的四杆靶。
[1] SUN Jun-yue,MA Dong-mei.Intelligent MRTD testing for thermal imaging system using ANN[J].SPIE,2006,6031:111-117.
[2] 王东伟,张旭升,何川.红外热像仪最小可辨温差客观评测技术[J].红外与激光工程,2010,39(4):611-613.WANG Dong-wei,ZHANG Xu-sheng,HE Chuan.Objective evaluation method for MRTD of IR thermal imager[J].Infrared and Laser Engineering,2010,39(4):611-613.(in Chinese with an English abstract)
[3] 姜贵彬,蓝天,倪国强.红外热成像系统评价的重要参数及测试方法[J].红外与激光工程.2008.37(增刊):470-473.JIANG Gui-bin,LAN Tian,NI Guo-qiang.Important parameters and testing methods of performance evaluation of thermal infrared imaging system[J].Infrared and Laser Engineering,2008,37(Sup.):470-473.(in Chinese with an English abstract)
[4] 金伟其,王吉晖,王霞,等.红外热成像系统性能评价技术的新进展[J].红外与激光工程,2009,38(1):8-13.JIN Wei-qi,WANG Ji-hui,WANG Xia,et al.Development on performance evaluation of thermal imaging systems[J].Infrared and Laser Engineering,2009,38(1):8-13.(in Chinese with an English abstract)
[5] 孙军月,马冬梅.智能测量热成像系统MRTD的应用方法 分 析 [J].红 外 与 激 光 工 程,2006,35(4):401-404.SUN Jun-yue,MA Dong-mei.Analysis of intelligent MRTD testing for thermal imaging system[J].Infrared and Laser Engineering,2006,35(4):401-404.(in Chinese with an English abstract)
[6] GONZALEZ R C,WOODS R E.Digital image processing second edition[M].Beijing:Publishing House of Electronics Industry,2007.
[7] 王永仲.现代军用光学技术[M].北京:科学出版社,2003.WANG Yong-zhong.Modern military optical technology[M].Beijing:Science Press,2003.(in Chinese)