自适应模糊PID复合法实现高精度阀球研磨机压力控制
2014-03-26余志鹏
余志鹏
(顺德职业技术学院电信系,广东佛山 528333)
0 引 言
球阀是实现管道系统开闭功能的重要元件。球阀的精度等级用“不圆度”这个概念来描述。不圆度[1](ovality)是指球形或圆形金属材料表面上最大与最小直径的差值,也称作椭圆度或失圆度。
根据球阀材料和精度等级不同,密封方式分为软密封和硬密封两种[2]。软密封是通过利用精度要求低的阀球与塑性材料密封环的过盈配合达到密封效果,不圆度在8μm以上的阀球体属于软密封等级。而硬密封是通过阀球与刚性密封环的高圆度接触达到密封效果,不圆度在8μm以下的阀球体属于软密封等级。硬密封球阀具有耐磨性强,实用性高的优点[3],一般应用在石油、化工加工管道等高要求的管道系统里,但是其加工精度高,且加工难度随着尺寸增大而加大,因此在一些管道设计中尽量避免采用硬密封球阀,而改用抗腐蚀能力差、使用寿命短、实用性偏低的软密封球阀。
文中针对上述问题,提出一种新型的高精度阀球研磨机,并对其进行分析和讨论,得到一系列的结论,详细论述如下。
1 系统的总体设计
本系统结构如图1所示。

图1 球阀研磨机示意图
利用特殊夹紧结构使阀球体在旋转过程中与研磨套动态接触,在接触的过程中把微观上突出(不圆)的部分通过摩擦力磨平。要实现这一功能,必须实时对阀球表面与研磨套之间的压力进行检测,形成一个闭环系统,对以STM32F103VCT6为核心的微机系统通过液压传动,对研磨套作用于阀球体表面的压力实现精确控制,与从压力传感器实时采集得到压力数据比较,即可实现恒压控制。
本系统主要通过电液比例阀控制研磨套对阀球表面压紧,而作为复杂的非线性高阶系统,比例阀控制系统受速度、外力等参数变化的影响较大,普通的常规PID控制难以达到效果。系统采用两个模糊控制器,并联结构,一个对PID参数实时调整,大偏差情况下(误差e>45N),采用与PID控制平行的模糊控制,既能抑制超调又有良好的动态性;小偏差(-10N<e<10N)时采用模糊自适应PID控制策略,可以消除稳态误差,此PID控制可以实现在线整定[4],这样的策略可使系统达到较好的效果。
高精度阀球研磨机的压力控制系统是以STM32F103VCT6为核心的主控板、压力传感器、高精度A/D采样模块、放大器、电液比例阀执行器、启停阀执行系统组成,主控系统框图与液压油路如图2所示。
系统将压力传感器采集的球阀和研磨套之间的表面压力,16位A/D转换模块放大并实行精确的A/D采样,电液比例阀接收到的是恒定输出频率、占空比可调的PWM信号,实现高精度阀球研磨机压力的闭环控制。
主控制系统(见图2)是由电源电路、嵌入式控制器STM32F103VCT6,FLASH,SRAM、复位电路、JTAG接口外部仿真电路、触摸屏组成的嵌入式控制系统。系统的主控芯片是意法半导体生产的高性能STM32F103VCT6微处理器。它采用ARM的Cortex-M3内核,片上主要集成有128个通用I/O口、24个多级中断源、10个PWM定时器及4个内部定时器、8kB Cache、2个带有握手协议的串口、LCD(多媒体)控制器,具有RTC(实时时钟)日历功能[5]。
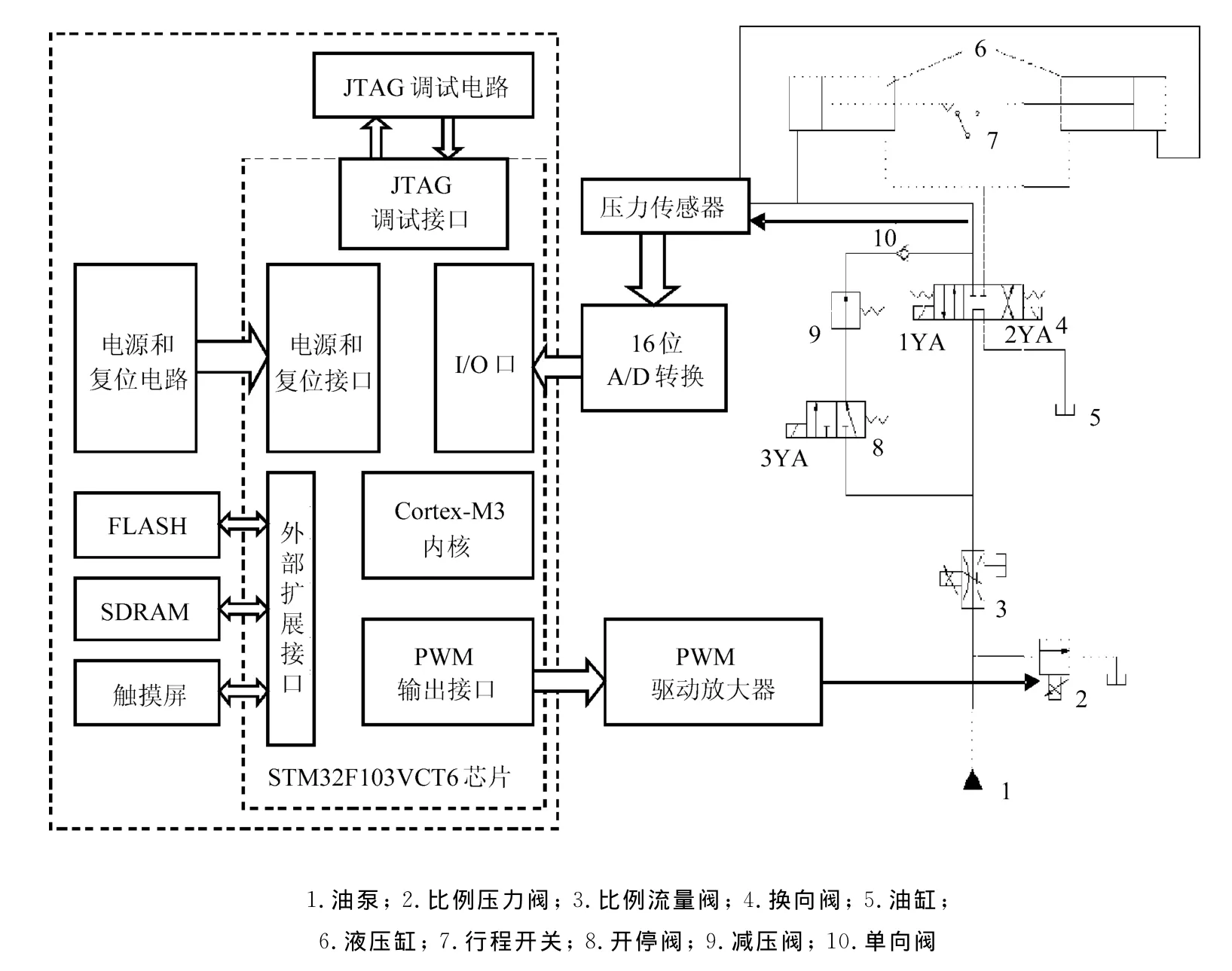
图2 主控系统框图与液压油路
主控制系统中,把2个EX601DL压力传感器安装在研磨主轴上,EX601DL的内部结构是一个电桥,它是通过压电材料把压力信号转化为桥臂电阻阻值的变化,在5V供电下,EX601DL输出的最大电压值是7.5mV(对应50kg压力),虽然STM32F103VCT6微处理器自带的12位ADC,为了响应0.01mV级的电压变化,采用AD转换芯片AD7705为核心的AD采样电路。AD7705是一款16位高精度差分输入AD转换芯片[6],它具有1~128倍的可编程放大倍数,可编程进行设定;它的数字数据通过串行协议进行传输,节省I/O口。
将压力数据经A/D转换送入数据处理模块,作为自适应模糊PID复合算法的参数,经处理后自动调整主控芯片中定时器比较缓冲区寄存器TIM2_CCR1和TIM2_CCR2的值,对输出PWM信号占空比做出改变,由PWM原理使输出电压为0~3.3V间调节,通过2N3904和TIP41组成的PWM功率放大电路,转化为0~38V(0~1 300mA)的控制电压对电液比例阀进行控制。主控板已集成JTAG调试电路,用数据线与PC相连,通过IAR软件可在线调试目标程序。
2 自适应模糊PID控制器设计
2.1 PID算法
PID算法公式为:

其增量式为:

式中:KP,KI,KD——分别为系统的比例系数、积分时间常数和微分时间常数;
u(k)——k时刻的输出量;
Δu(k)——输出量的变化率;
e(k)——k时刻的偏差;
e(k-1)——k-1时刻的偏差。
2.2 系统模糊化
模糊PID控制器由一个双输入三输出系统的推理部分组成,其结构框图如图3所示。
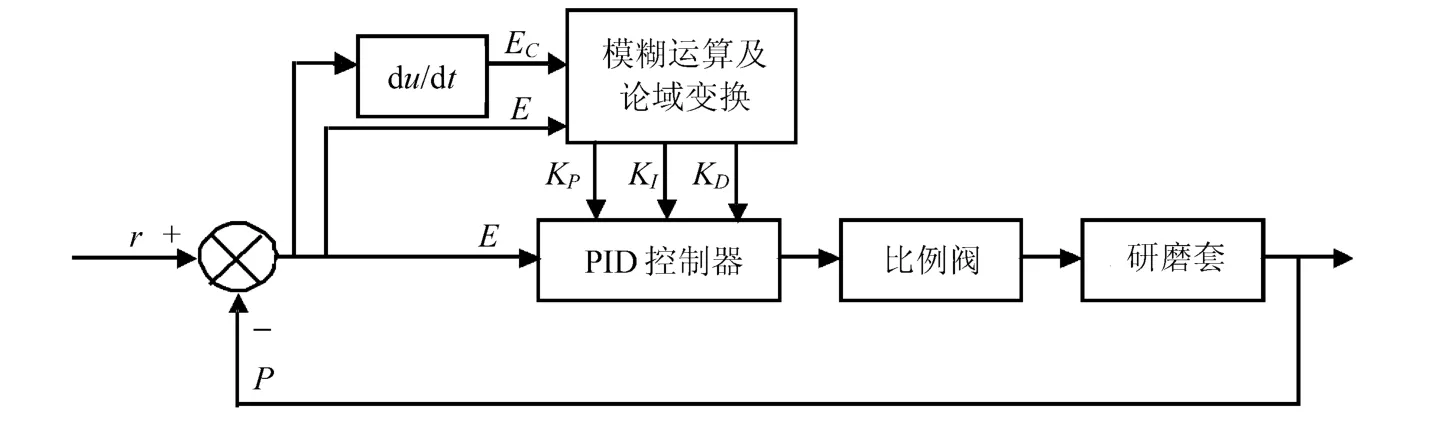
图3 控制系统原理图
模糊算法的输入是两个输入量偏差和偏差变化率的绝对值,控制器的输出是KP,KI,KD。按设定值要求将E,EC和KP,KI,KD的论域均分别定义为[-3,-2,-1,0,1,2,3],通过模糊语言变量描述它们[7],分别为:PB,PM,PS,ZO,NS,NM,NB。确定模糊定义后,在MATLAB软件中,设计KP,KI,KD,E,EC的论域对应的模糊语言变量,其隶属函数曲线如图4所示。

图4 E,EC和ΔKP,ΔKI,ΔKD的隶属函数曲线
2.3 模糊规则
根据自整定原则及文中试验和经验总结,得ΔKP,ΔKI,ΔKD的控制规则见表1。
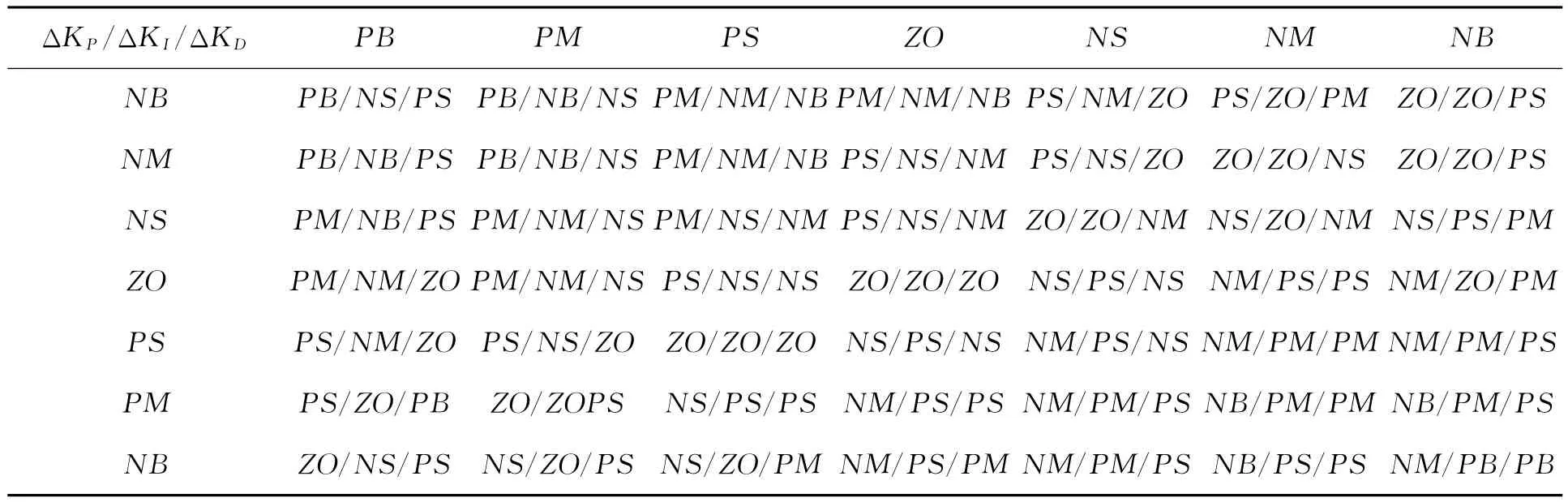
表1 KP/KI/KD模糊控制规则表
2.4 模糊推理和清晰化
本项目采用MIN-MAX重心法[8],对系统进行模糊清晰化。设输出清晰值为uo,则:

式中:ui——论域中的每个元素,作为隶属度(i)的加权系数,它可用作待判决输出模糊集合。
应用加权平均法为模糊集合求得的判决结果是平均值u。为适应控制要求,最后用输出量化因子乘以u,就可得到控制量的实际值。
3 仿真结果
控制系统仿真模型如图5所示。

图5 仿真模型
需要考虑PID控制的精确性,同时要保证系统对大偏差值有快速反应性和良好的动态性能,文中采用了模糊和自适应PID的结合控制。利用MATLAB/Simulink进行仿真,只用PID算法和引入模糊自适应PID算法后阶跃曲线响应分别如图6和图7所示。

图6 只用PID控制时阶跃曲线图

图7 采用模糊-自适应模糊PID控制时阶跃响应曲线
当前期计算得出较大偏差,采用模糊控制,若是小偏差,采用自适应模糊PID控制。
4 效果演示与结论
本设备利用特殊的机械设计原理,使阀球体与研磨套充分接触、相互摩擦来修正阀球体圆度。无论阀球体的材料是生铁、不锈钢、表面涂料还是特种陶瓷,设备都能保证阀球体精度。同时,设计者把高精度、高效率微机控制系统引入到该设备里面,利用自适应模糊PID符合精度控制技术实现自动恒压控制。操作员可根据需要设定研磨接触压力,单片机控制的闭环系统保证加工过程中保持给定压力;设备在使用过程中实时反映研磨接触压力。
本设计的样机已经制成,并成功加工3批球阀,最小外径为50mm,最大外径为450mm。加工好的阀球体样品委托专业的阀门生产厂家用专业圆度检测设备进行检测,送测的阀球体的不圆度均在8μm左右。测试结果如图8所示。
送测的陶瓷阀球主要成分为氧化锆,外径为35mm,非常坚硬,从图中可以看到,该阀球的不圆度为3.237μm,完全符合硬密封要求。

图8 由高精度阀球研磨机研磨出来的球阀送测图
[1] 任嘉卉.公差与配合手册[M].北京:机械工业出版社,2000:151-158.
[2] 刘英,袁绩乾.机械制造技术基础(上)[M].北京:机械工业出版社,2008:325-331.
[3] 王立新.模糊系统与模糊控制教程[M].北京:清华大学出版社,2003:116-119,244-249.
[4] AD7705/AD7706Datasheets.ANALOG DEVICES[EB/OL].[2014-03-17].http://www.analogdevice.com,2008.
[5] STM32f103ZE芯片手册.STMicroelectronics[EB/OL].[2014-03-17].http://www.STMicroelectronics.com,2010.
[6] 郭松林,张礼勇,林海军.Σ-ΔA/D转换器的原理与分析[J].电测与仪表,2002,11(39):21-24.
[7] C A Tan,B S Kang.Automatic transmissions diagnosis based on Fuzzy neural network[C]//2011International Conference on Digital Manufacturing&Automation,2011:242-251.
[8] 阮晓钢.神经计算科学[M].北京:国防工业出版社,2006:164-173.
