正弦力校准和计量溯源研究*
2014-03-22曾利民倪守忠蒋晓波
曾利民 倪守忠 蒋晓波 曹 灏
(浙江省计量科学研究院,杭州 310013)
0 引言
动态力计量分为稳态激振力、瞬态冲击力和负阶跃力[1-3]。负阶跃力通过静态加荷使被加载结构产生初始变形,因力传感器、卸荷部件间迅速脱离而产生急剧变小直降为零的荷载,其特点是力值静态测量、频率范围宽,但负阶跃力下降沿由于机架振动而不能保持单调。冲击力又称瞬态脉冲力,通过重力势能转换成落锤动能或弹性势能转换成质量块动能,与被加载结构碰撞所产生的剧烈变化荷载,其中落锤式冲击力计量标准结构简单,容易产生大力值动态力,而空气轴承质量块碰撞式计量标准可消除重力影响,但不易产生大力值动态力。稳态激振力又称正弦力,计量标准装置由激振力源、测量系统组成,按加速度测量系统分为绝对法与相对法。德国物理技术研究院(PTB)、中航工业北京长城计量测试技术研究所(304)都建立了正弦力计量校准装置,用于力值≤10kN、频率范围20~5000Hz力传感器与测力系统的校准[4]。
1 正弦力测量原理
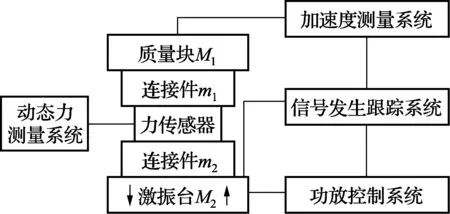
图1 正弦力测量原理
(1)
(2)

2 正弦力激光干涉法测量
PTB和304均采用激光干涉法建立的正弦力计量校准装置基于LABVIEW平台实现系统控制与信号分析,如图2所示。力传感器幅值灵敏度测量不确定度评估参考频率点(80Hz或160Hz)Urel=1.0%,其它频率点Urel=2.0%。
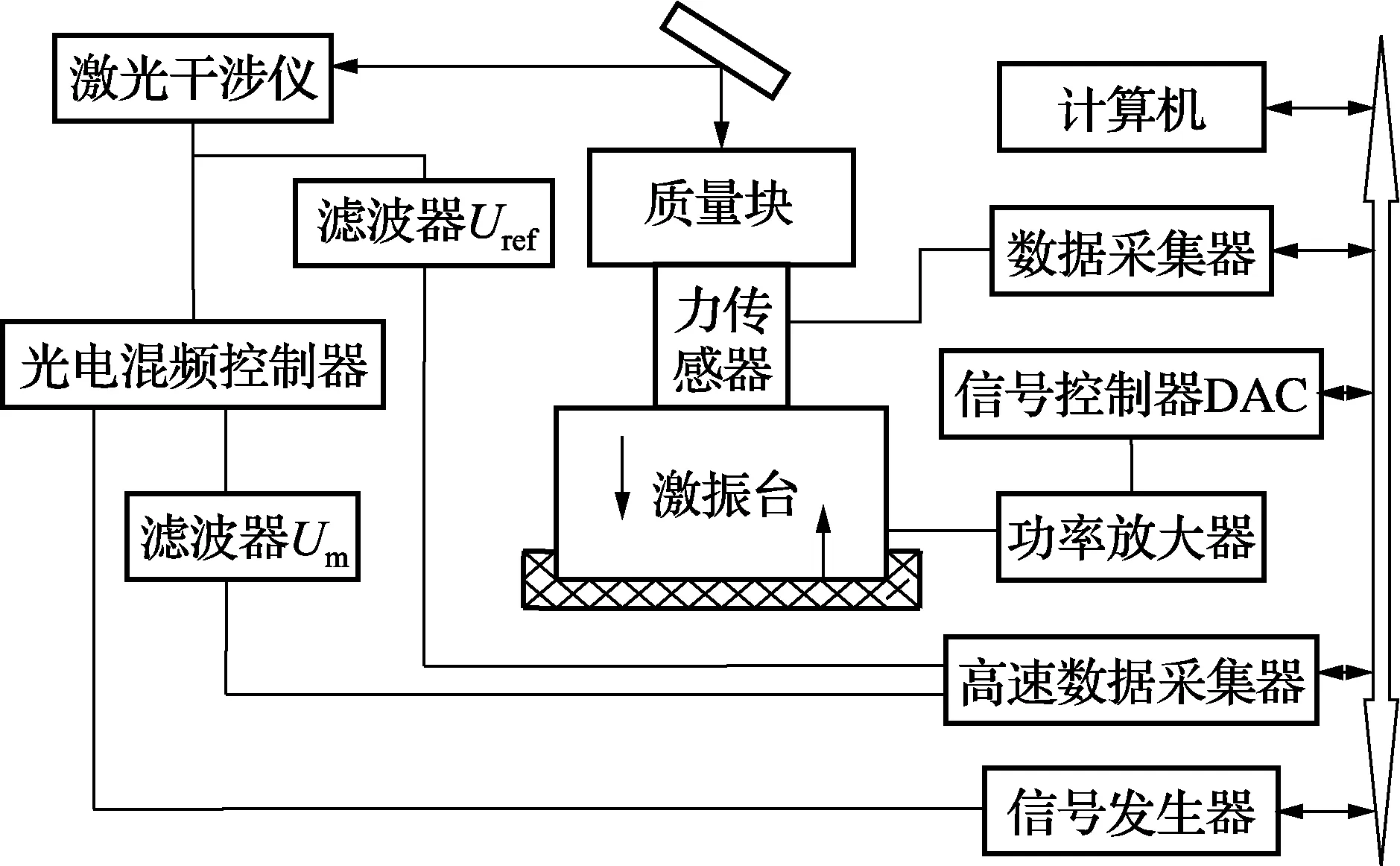
图2 正弦力激光干涉(绝对)法校准装置示意图
首先用激光干涉仪测量质量块顶面加速度,然后根据质量块加速度分布计算正弦力[4-5]。其特点:1)加速度测量采用最佳测量不确定度参考频率点±0.05%,其它频率点±0.1 %的氦氖激光器光源外差式激光干涉仪,其测量头安装在二维位置控制平台上实现加速度的扫描测量。外差式激光干涉仪由Bragg盒提供频移输出原始干涉信号(Uref),并经光电混频控制器同步形成质量块振动电信号(Um),再对高速数据采集得到的Um和Uref这两个信号系列进行幅值、相位处理实现加速度测量。2)采用定位准确度优于2μm的计算机二维控制装置控制平台运动,对质量块上表面加速度分布进行测量,如PTB在质量块顶面中心及径向1/2半径的圆周处测量加速度控制振动台,并用其加速度平均值计算正弦力的幅频特性和相频特性[1-3]。3)动态力传感器、数据采集器与计算机构成数据采集系统,计算机控制各模块在正弦力校准中同步工作,激光干涉仪、力传感器并行采集的电信号经放大后输出至振动信号控制器DAC,再通过功率放大器驱动振动台。
3 正弦力加速度计法测量
加速度计法正弦力测量比激光干涉法正弦力测量成本低得多,加速度计法正弦力计量校准装置也按式(1)计算正弦力,通过扫频测量力传感器动态特性,在一定频率范围内改变信号源频率可得到不同校准频率点力传感器的幅值灵敏度,如图3所示。力源由机座、导向杆、振动台、质量块及其小阻尼导向器和提升装置组成,额定激振力60kN;质量块为圆柱体,表面抛光,上下平行。测量系统主要技术参数:A/D模数转换16位,采样频率优于192kHz,幅误差优于±0.1%,频率准确度优于±0.001%,加速度计量程±100g,安装频率高于20kHz,幅值非线性度优于±1%,并要求激励电源输出电压稳定,4小时内不超过被校系统相应准确度指标的四分之一。
设计时不仅考虑振动台激振力、质量块、机架导向机构等因素影响,也考虑振动台、力传感器、质量块和加速度计间的连接影响。质量块选用1,2,3,5,8,12,20,40,70,120kg,正弦力测量范围0.5~40kN,其大小通过质量块更换与加速度调整实现,频率范围20~2000Hz,测量不确定度参考频率点(80Hz或160Hz)Urel=1.5%,其它频率点Urel=2.5%。其特点:1)电动振动台、机架支承在不同基础上,在低频端由于振动台横向振动可能加剧对质量块导向器、导向杆产生影响,造成加速度响应中含有较多的横向运动成分而出现测量误差,因而对振动运动整体(含质量块)、机架导向机构共振频率进行计算,并采用小阻尼导向技术进行预防;在高频端由于各安装部件间的耦合关系在削弱,各部件(质量块、力传感器)振动加速度不再相等,因而力传感器、质量块间连接要有一定刚性。2)数据采集分析子系统连续采样,各通道并行同步采样,能计算正弦力频率、幅值、相位及振动功率谱密度、横向振动比、不均匀度、失真度和频率响应谱等。3)振动台采用空气弹簧载荷支撑及较高抗偏载力矩的摇臂悬挂系统与滚轮导向;采用高效、低噪声的风机冷却,并内置隔振装置确保台体持续稳定运行,保证振动加速度波形稳定性好(<1%),失真小(参考频率点<5%,其它频率点<10%),横向运动小(参考频率点<5%,其它频率点<10%)。
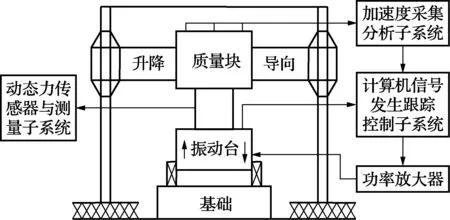
图3 加速度计(相对)法正弦力校准装置示意图
总之,被校力传感器安装在振动台体上,负载质量块再连接在力传感器上,力传感器本身质量在运动中对其敏感元件的作用通过力传感器等效质量反映。当质量块较小(1,2,3,5,8,12kg)时,不设质量块导向措施,在其顶面中心与径向半径3/4处共安装5只加速度计进行加速度测量,并用其平均值表征负载质量块的加速度;当质量块较大(20,40,70,120kg)时,质量块设空气轴承导向措施,在其顶面中心与半径2/3处共安装5只加速度计进行加速度测量,并用其平均值代表负载质量块的加速度。其特点:1)力源采用电动振动台,结构简单、输出推力大,频率范围宽、激励信号振幅与频率稳定,操作方便、易于自动控制,但当激励信号频率增高时,振动台动圈绕线会因阻抗增加、电流下降而导致激振力变小。2)数据处理简单,通过扫频可得到动态力传感器的动态特性,在一定频率范围内改变信号源频率可获得不同频率定点动态力传感器的幅值灵敏度。3)力传感器安装方便,能保证有一定预紧力且受力均匀,激振力作用稳定、可靠。
4 正弦力量值溯源
根据正弦力定义、测量方法研究制定的量值溯源,如图4所示,图中Ur为动态力扩展测量不确定度。正弦力计量校准等级序列明确了正弦力标准向工作计量器具量值传递的程序、测量不确定度及校准方法,并要求正弦力标准装置之间应进行比对。
原级标准用激光干涉法测量加速度,正弦力溯源到长度、时间、质量与电量;次级标准用加速度计法测量加速度,正弦力溯源至质量、加速度与电量,其加速度测量系统应采用激光干涉(绝对)法检定校准。次级标准加速度计法正弦力标准装置只能向工作用力传感器和测力系统进行量值传递;而原级标准激光干涉法正弦力标准装置既可向动态力标准传感器或测力系统进行量值传递,也可向动态力工作传感器和测力系统进行量值传递。
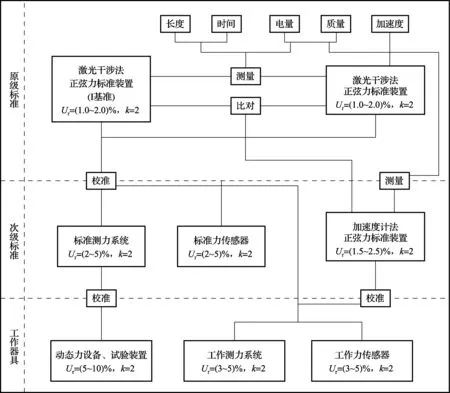
图4 正弦力计量校准等级序列(量值溯源图)
5 结束语
正弦力以质量为中间量,用激光干涉法测量加速度是提高其测量准确度的重要手段。在质量块上特征点位置安装加速度计测量加速度并控制振动台,进而对力传感器幅频特性、相频特性进行正弦力计量校准,易于推广。由于质量块弹性模量及各安装部件间连接刚度有限,因而正弦力测量应考虑加速度分布;由于振动对机架影响,在计算不同周期正弦力峰值时会因连接件底面轴向力计算周期数不足而导致计算结果不稳定,因而振动要达到稳定状态才可进行正弦力测量。另外,正弦力量值溯源图有待进一步完善,并建议某一频率校准时,若力传感器或测力系统在其测量范围内(如20%,40%,60%,80%,100%量程)灵敏度系数变化较大、超出线性要求,则判该力传感器或测力系统在相应频率不适合动态使用;或者某一正弦力值校准时,若力传感器或测力系统灵敏度系数在某频率点显著变化,则判该力传感器或测力系统在相应频率及以上频率范围不适合动态使用。
[1]Roll Kumme.The determination of the effective dynamic force for the calibration of force transducers,with due regard to the distribution of mass and acceleration[C]//XV IMEKO TC3 Conference,Madrid(Spain):IMEKO,1996:129-138
[2]Zhang Li,Rolf Kumme.Investigation of interferometric methods for dynamic force measurement[C]//XVII IMEKO World Congress,Metrology in the 3rd Millennium Dubrovnik,Croatia:IMEKO,2003
[3]孙桥,于梅.冲击及瞬态冲击力绝对法校准技术的研究现状[J].工业计量,2005(1): 12-15
[4]张力.激光干涉法进行正弦力校准研究[J].计量学报,2005(5): 337-342
[5]王宇,张力,张立拮,刘永录,陈璐,宋娜.正弦力校准中质量块加速度分布影响的理论修正研究[J].计测技术,2010(3):1-4
