基于模糊神经网络的混联式混合动力汽车驱动系统工作状态控制研究
2014-03-22陈德海曹威锋付长胜
陈德海,曹威锋,付长胜
(江西理工大学电气工程与自动化学院,江西赣州341000)
基于模糊神经网络的混联式混合动力汽车驱动系统工作状态控制研究
陈德海,曹威锋,付长胜
(江西理工大学电气工程与自动化学院,江西赣州341000)
通过分析混联式混合动力汽车理想工作模式的控制,提出了一种新型的汽车驱动系统工作模式的控制方法——模糊神经网络控制.采用模糊神经网络能够自适应的控制汽车驱动模式工作状态的切换,能够节能减排,提高发动机的动力.利用Matlab/Simulink建立模糊神经网络控制模型,仿真实验结果表明,该控制方法达到了预期的目的,具有较好的效果.
混联式混合动力汽车;模糊神经网络;汽车驱动系统工作模式;汽车工作状态切换控制;动力控制策略;Matlab/Simulink仿真
0 引言
混合动力汽车是在同一辆汽车上同时配备电力驱动系统和辅助动力单元系统.根据不同结构可以分为串联式混合动力汽车、并联式混合动力汽车和混联式混合动力汽车.串联式混合动力汽车是通过发电机将发动机的机械能转化为电能,一部分电能带动电动机来驱动汽车,另一部分电能给蓄电池充电,蓄电池放电也可以带动电动机工作来驱动汽车,汽车直接通过电能来控制汽车的运行,适用于车辆的频繁起步及中低速运行,但是机械能和电能之间的转化导致了较大的能量损失.并联式混合动力汽车可以工作在三种模式下:发动机单独驱动、蓄电池单独驱动及二者共同驱动,能够得到电力的辅助,降低了排放和燃油消耗,多用于加速和中高车速,而且能够利用再生制动,控制电动机转化为发电机状态给蓄电池充电,但蓄电池没电
时,不能通过发动机给蓄电池充电.混联式混合动力汽车[1]主要具备5种工作状态:发动机单独驱动汽车、蓄电池单独驱动汽车、发动机和蓄电池共同驱动汽车、发动机将机械能通过发电机转化为电能给蓄电池充电以及发动机将机械能通过发电机转化为电能带动电动机驱动汽车.混联式混合动力汽车的最大的优点就是能够根据实际的工况实现对能量合理的管理,对能量合理的管理表现在能够根据实际的工况通过控制器自适应的切换驱动系统的工作模式,使得驱动系统工作在最理想的工作状态,从而使得汽车节能减排,改善汽车的动力性,实现良好的经济性.
1 模糊神经网络控制策略
模糊控制借鉴人的思维模式,采用模糊的语言和模糊推理控制规则算法,达到控制的目的,应用简单方便.但模糊控制缺乏自学习和自适应性,使得被控对象的控制精度不高.神经网络控制模拟人的神经系统处理数据,具有良好的自学习、自适应性和非线性能力,可以精确的控制被控对象,能够很好的克服模糊控制的不足.模糊神经网络具备模糊控制和神经网络控制的优点,使得神经网络具备模糊控制和处理数据信息的能力,充分体现了控制系统的智能特性.
混联式混合动力驱动系统包括:发动机的驱动系统、电动机的驱动系统和电池驱动系统.混联式混合动力车驱动系统具有以下5种工作状态[2]:①发动机关闭,强制充电;②发电机发电带动电动机来驱动汽车,并且要求发电机给电池充电;③发动机关闭,电池带动电动机单独给汽车提供动力;④发动机单独给汽车提供动力;⑤发动机与电池带动电动机一起给汽车提供动力.由于实际的工况信息很难获取,只能通过传感器来了解工况信息.在此通过传感器获取蓄电池的电量、车速和加速踏板的行程的变化率作为输入,录属函数采用高斯函数,运用模糊规则推理,神经网络调整参数,归一清晰化后,输出得到整车所需的转矩,从而控制驱动系统的工作模式.
2 驱动系统工作状态切换控制模型建立
汽车在行驶的过程中实时路况不得而知,只能借助踏板和车速的信息来了解汽车要行驶的趋势和意图.模糊神经网络能够根据这些已知信息,通过自适应自学习算法进行处理,使得输出的转矩符合要求,根据汽车所需要的转矩,通过这些信息通知控制系统控制发动机和电池及电动机的工作状态,从而有效达到汽车的行驶所需的状态,其动力驱动程序[3]如图1.

图1 汽车驱动控制框图
2.1 模糊神经网络的结构模型
该系统的模糊神经网络采用基于Mandeni模型的模糊神经网络,其结构如图2所示.此模糊神经网络结构图有5层:输入层、模糊化层、模糊规则层、去模糊层、输出层[4].
1)输入层.将节点与输入向量直接相连接,然后归一化处理,得到一个新的输入向量,论域全变换成[0,1].

图2 基于Mamdani模型的模糊神经网络结构图
2)模糊化层.该层的每一个节点均代表一个模糊语言,如非常快、快、中、慢、非常慢等.本层将输入分量计算为属于各模糊语言集合.录属函数采用高斯函:
i=1,2,3,…,n;j=1,2,3,…,mi;n是输入向量的维数,mi是xi模糊分割的个数;cij和δij分别表示录属函数的的中心值和宽度.
3)模糊推理层.运用模糊规则进行推理,每一个节点代表一个模糊规则,然后计算出每条规则的适用度.一共有m=m1*m2…m3条模糊规则.
4)去模糊层.即清晰化的过程,将模糊语言变成相应论域的精确值.
5)输出层.将连接权值与适用度相乘再整体求和得到一个输出值.
该模糊神经网络结构图的工作过程为:传感器将所获取的车速、电池的电量和加速踏板的行程的变化率作为输入层的输入信息,输入层得到输入数据后将其模糊化(计算各输入分量属于各语言变量值模糊集合的录属度函数),然后根据模糊控制规则推理计算,最后得到输出的值[5].网络的节点参数的权值采用BP神经网络用反向调整各层(先调整输出最后调整层输入层)的权值,使得总误差的平方和最小的算法.
2.2 模糊神经网络学习算法
模糊神经网络采用BP神经网络训练样本的数据,采用梯度搜素技术[6]即多层网络运行BP学习算法时,包括了正向和反向传播两个阶段.在正向传播中,输入信息从输入层经隐含层传向输出层(正向传播),若是输出层得到期望的输出,则学习算法结束;如果输出层得不到期望的输出,调整各层连接权值及高斯函数的中心值和宽度,使得误差的平方和最小.其权值及中心值和宽度的调整步骤如下.
1)误差平方和计算.模糊神经网络的总和误差为:

式(1)中e为误差的平方和的一半;yi为实际输出值;ti为期望输出值;p为输入向量的维数.
2)神经网络权值的调整[7].神经网络的权值调整公式为:


模糊神经网络运用以上学习算法,可以轻松快捷的修正权值和模糊控制的参数,使得输出满足要求.
3 混联式混合动力汽车驱动系统工作模式切换的实现
3.1 模糊规则表的制定
根据实际情况将电池的电量分为5个模糊子集分别为:电量严重不足NB(负很大)、电量不足NS(负中)、一般ZO(零)、电量充足PS(正中)、电量非常充足PB(正很大).在NB集合内电量严重不足,强制充电;在NS集合内,电池电量不足,主动请求充电,但不允许输出;在ZO集合内,电池电量一般,可以输出,也可以充电;在PS集合内,电量充足,主动充电完成,允许输出电能,也可以回收制动能量;在PB集合内,禁止充电.
由于模糊规则计算满足结合律和交换律,为了得出三维图,可以先计算车速和加速踏板的行程的变化率合成为驾驶员所需转矩.将车速和加速踏板的行程的变化率也都分为5个模糊子集,统一采用模糊语言:NB NS ZO PS PB.其模糊规则[9]如表1.
通过表1得到了驾驶员所需转矩模糊子集.再利用蓄电池的电量和驾驶员所需的转矩来合成混联式混合动力发动机的驱动系统所需要输出的力矩.将电池电量(SOC)和驾驶员所需转矩也分割为5个模糊子集,其模糊规则如表2.
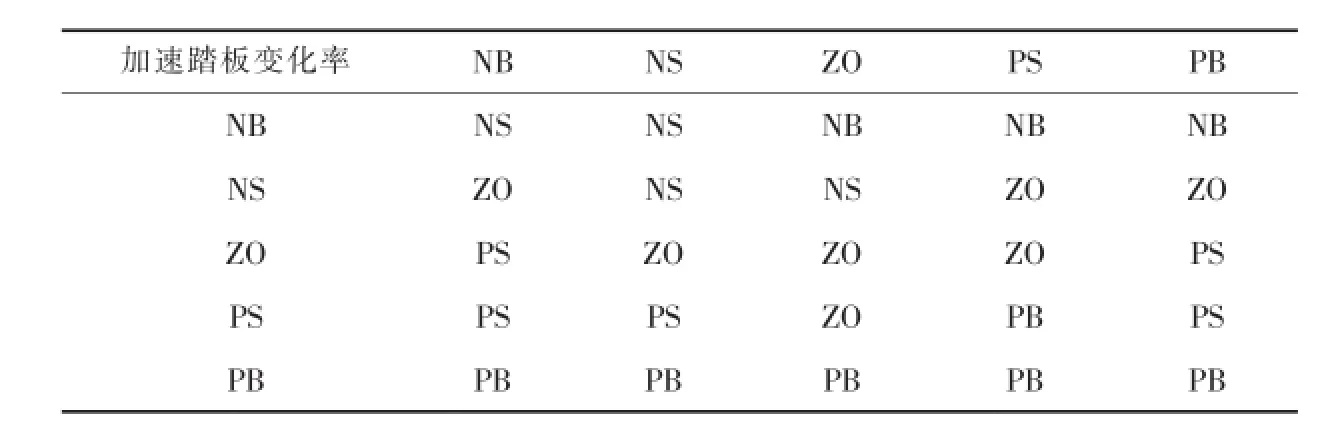
表1 车速和加速踏板行程合成驾驶员所需转矩模糊规则

表2 SOC和驾驶员所需的转矩合成的汽车输出驱动力的模糊规则
3.2 驱动系统工作状态的切换
根据表2将发动机的输出力矩分为5个模糊子集,而汽车的驱动系统也被分为5种工作状态,现在将其一一对应起来[10-11].神经网络控制器输出,在NB模糊子集内,要求发动机关闭,强制充电;在NS模糊子集内,发动机给发电机发电带动电动机来驱动汽车,而且发电机发电给蓄电池充电;在ZO模糊子集内,发动机关闭,电池单独给汽车提供动力;在PS模糊子集内,电池驱动电动机系统关闭,发动机单独给汽车提供动力;在PB模糊子集内,发动机与蓄电池共同给汽车提供动力.
4 实验结果仿真
采用Matlab/Simulink[12-13]里面的ANFIS仿真并建立发动机模型,ANFIS能够优化录属度函数,调整中心值和宽度,而且能调整连接权值,使系统的误差平方和最小.其发动机的参数为:4缸顺序工作,16个气门,最大扭矩:83 N·m(3000~3500 r/min),最大功率:38.5 kW(5200 r/min),压缩比:9.4:1,点火提前角:6±2°,排量:1.0 L,气缸直径:65.5 mm,活塞行程:78 mm,冷却方式:水冷,燃料供给:多点顺
序电控供给,标定转速:6000 r/min、控制方式:电子控制.利用已有的数据训练车速、加速踏板的行程变化率、电池的电量、驾驶员所需转矩及发动机输出驱动力矩(该数据都是经过归一化后处理,因此数据不用加入单位),得到了训练后他们的录属函数以及调整好了权值,得到了训练好的模糊神经网络.利用训练好的模糊神经网络,将数据输入得到了网络输出,计算出了相对误差,仿真结果如表3和表4.结果表明,该模糊神经网络能将误差基本上控制在5%以内,不会影响发动机、电动机以及发电机的工作模式的切换,该模糊神经网络具有良好的控制效果.

表3 基于模糊神经网络控制驾驶员所需转矩的结果
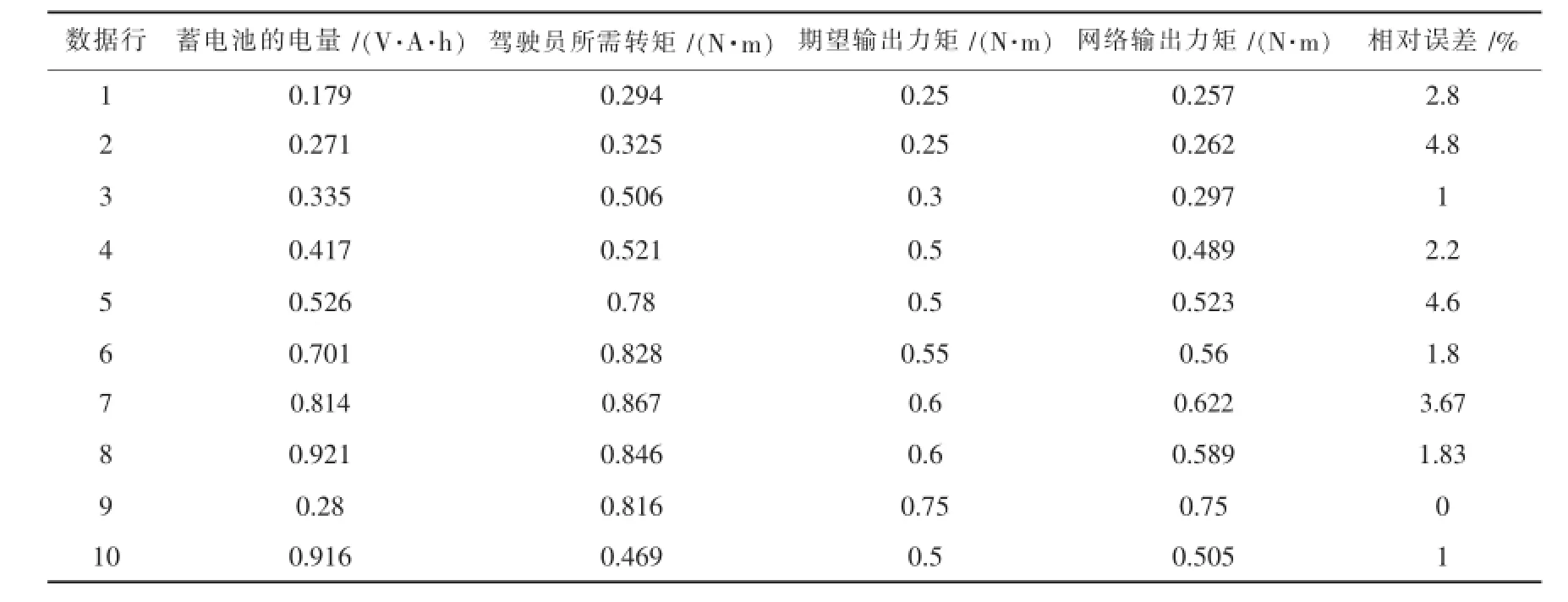
表4 基于模糊神经网络控制发动机输出驱动力矩的结果

图3 发动机的输入参数与时间的关系
根据电池电量、车速和加速踏板行程的变化率(如图3),最后得到了驾驶员所需转矩三维MAP图(如图4),以及所需的发动机输出驱动力矩的三维MAP图(如图5).再根据所得的驱动力矩,得到
其发动机工作的模糊子集,根据驱动系统的曲线一一对应关系,得到发动机、电动机及发电机的工作模式.

图4 驾驶员所需转矩的三维立体截图
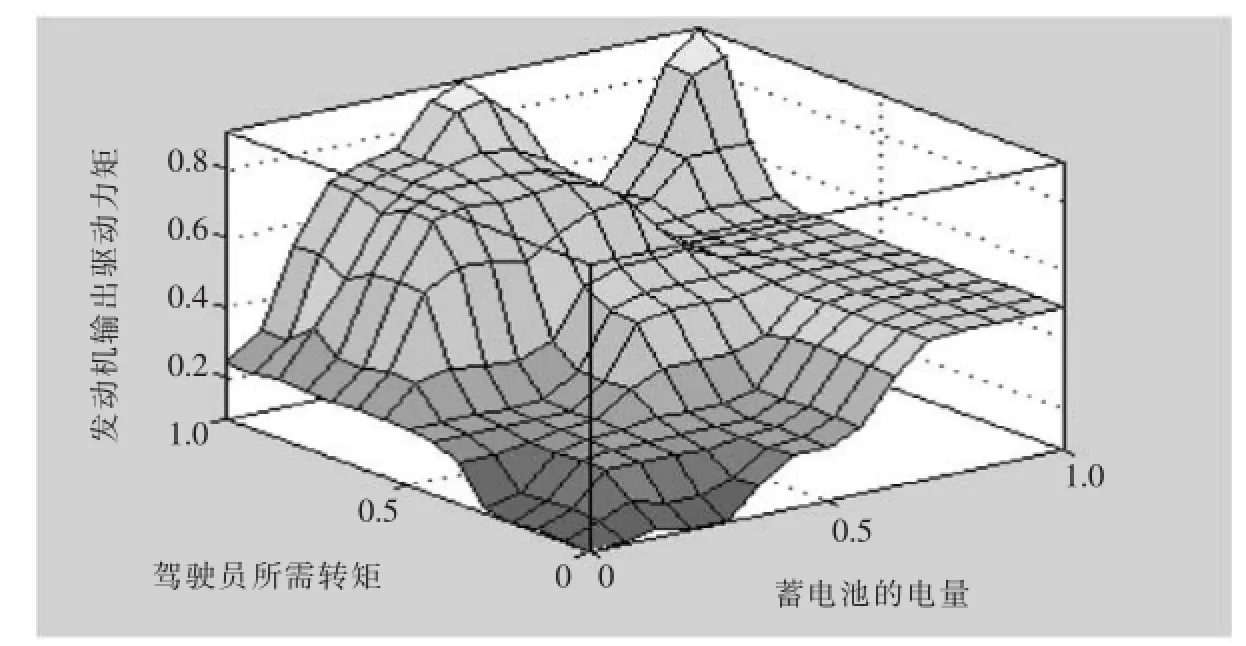
图5 发动机输出驱动力矩三维图
5 结论
文中根据工况信息车速、加速踏板的变化率及蓄电池的电量,采用模糊神经网络控制发动机输出驱动力矩,从而得到了发动机的工作模式,在保证了汽车的安全性和汽车稳定性的同时,达到了节能减排的目的.利用不同的工况信息使得汽车工作在不同的工作模式下.在城市工况下,经常低速和频繁起步行驶,通过模糊神经网络的学习,使得汽车尽量采用电能驱动,能够很好的节能和保护环境;在高速工况下,汽车需要较大的力矩时,经过模糊神经网络的学习,可以采用电能和发动机同时驱动的工作模式,从而保证良好的动力性.采用模糊神经网络控制汽车的工作模式,具有较好的智能特性,为以后的汽车的智能化提供一种参考.
[1]刘文杰.混联型混合动力汽车控制策略优化研究[D].重庆:重庆大学,2006.
[2]张华,周荣.混联式混合动力汽车控制策略开发与仿真研究[J].汽车技术,2007(8):26-29.
[3]李志海,王耀南,陈正龙.基于模糊神经网络的纯电动车动力系统控制研究[J].交通与计算机,2008(1):44-48.
[4]谢峰,马智民,栾卫东.基于模糊神经网络的高速公路路面质量评价[J].西南交通大学学报,2013,48(1):160-164.
[5]林家国,刘晓波.模糊神经专家系统在风机实时状态监测与故障诊断中的应用[J].江西理工大学学报,2006,27(6):12-15.
[6]Wang S W,Yu D L,Gomm J B,et al.Adaptive neural network model based predictive control for air-fuel ratio of SI engines[J]. Artificial Intelligence,2006(19):189-200.
[7]李国勇.智能预测控制机器及MATLAB实现[M].北京:电子工业出版,2010.
[8]谢常清,鄂加强,成志明,等.基于模糊神经网络的点火提前角时间差软测量模型[J].内燃机工程,2009,30(2):73-77.
[9]DENG X S,WANG X Z.Incremental learning of dynamic fuzzy neural networks for accurate system modeling[J].Fuzzy Sets and Systems,2009,160(7):972-987.
[10]宋萌萌,肖顺根.基于模糊PID算法的WEDM-LS恒速走丝控制系统的设计[J].江西理工大学学报,2013,34(5):41-47.
[11]何海.混合动力汽车控制系统设计与仿真[D].武汉:华中科技大学,2006.
[12]张德丰,杨文茵.MATLAB仿真技术与应用[M].北京:清华大学出版社,2012.
[13]兰红,田进,李淑芝,等.基于Matlab GUI的图像处理平台设计[J].江西理工大学学报,2014,35(3):79-84.
Work state of vehicle driving system switch of split hybrid electric vehicle based on the fuzzy neural control method
CHEN Dehai,CAO Weifeng,FU Changsheng
(School of Electrical Engineering and Automation,Jiangxi University of Science and Technology,Ganzhou 341000,China)
A new control method for work state of vehicle driving system named the fuzzy neural control method is proposed based on analyzing the switch about work pattern of vehicle driving system of split hybrid electric vehicle(PSHEV).Using fuzzy neural network control method is able to control the work pattern of driving system adaptively,save energy,reduce emission and improve engine power.The fuzzy neural control model is built by Matlab/Simulink.Simulation results show that this method has good effects.
series-parallel electric vehicle;the fuzzy neural network;work state of vehicle driving system; work state switch of vehicle;control strategy of driving;Matlab/anfis simulation.
TP29
A
2014-05-20
陈德海(1978-),男,副教授,主要从事天然气汽车电控装置、天然气储供系统、混合动力汽车等方面的研究,E-mail:13414569@qq.com.
2095-3046(2014)05-0056-06
10.13265/j.cnki.jxlgdxxb.2014.05.011