旋转工况下随钻定向测量方法研究及仿真分析
2014-03-22黎安伟王德彬刘云峰董景新
黎安伟,王德彬,刘云峰,董景新
(清华大学精密仪器与机械学系,精密测试技术及仪器国家重点实验室,北京 100084)
0 引言
随钻测量技术(Measurement while drilling,MWD)是指在钻进的同时实现各种参数(工程参数、地质参数及其他参数)连续实时测量的技术,其测量的工程参数主要为井斜、方位和工具面角,即随钻定向测量[1-2]。井眼轨迹参数(井斜、方位)和工具面向(工具面角)准确实时测量是实现定向钻井施工的基础。
目前,基于三轴磁通门和三轴加速度计的随钻定向测量仪是主流的定向测量仪器,其根据三轴磁通门和三轴加速度计的输出可以解算出当前的方位、井斜和工具面角[3]。但利用现有的解算方法,定向测量只能在非旋转工况下进行,否则,由于离心加速度(转速不恒定)和振动的影响,测量得到的井斜角和高边工具面角的误差非常大[4],解算出的方位角精度就更差。针对旋转工况,在现有的方位计算方法的基础上,推导新的方位角计算公式,并对其进行精度分析以及仿真验证。
1 方位角测量基本原理
如图1所示,现有方位的计算方法是利用高边工具面角θg和井斜角α,将三轴磁分量(Hx、Hy、Hz)向V2方向和V1方向分解,然后通过反正切函数求得磁方位角。
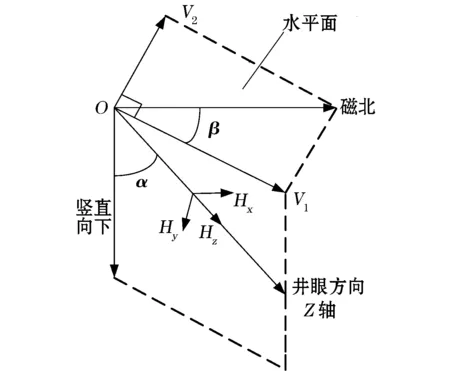
图1 方位角计算示意图
具体求解方程为[5-6]:
Hv1=Hzsinα+(Hxsinθg+Hycosθg)cosα
Hv2=Hxcosθg-Hysinθg
(1)

求解公式为:
在旋转工况下(设钻具以2 r/s的速度转动),若用式(1)进行方位角解算,则使用的高边工具面角(即gx、gy)和Hx、Hy,就必须是同一时刻的,这样,就无法对加速度计信号(gx、gy)和磁通门信号(Hx、Hy)进行滤波处理。若选用高带宽高精度的磁通门传感器,则在旋转工况下一次测量的磁通门信号也较精确;但由于振动和离心加速度的存在,一次测量的加速度信号(gx、gy)误差非常大,导致高边工具面角测不准,使用以上公式计算所得的方位角就非常不准,所以必须探索新的方位角计算方法。
1.1迭代法
由于磁通门受振动和旋转影响较小,一次测量所得的磁工具面角较准确,故可先根据磁工具面角推出高边工具面角,再利用式(1)计算方位角。
在井斜角α和方位角β确定的情况下,设总磁场为M,磁倾角为θ,则可推导磁工具面角MTF和高边工具面角GTF间关系。如图2所示,GTF与MTF的差值即为高边与磁北的夹角,两者只与方位和井斜有关,与钻具转动角度无关。
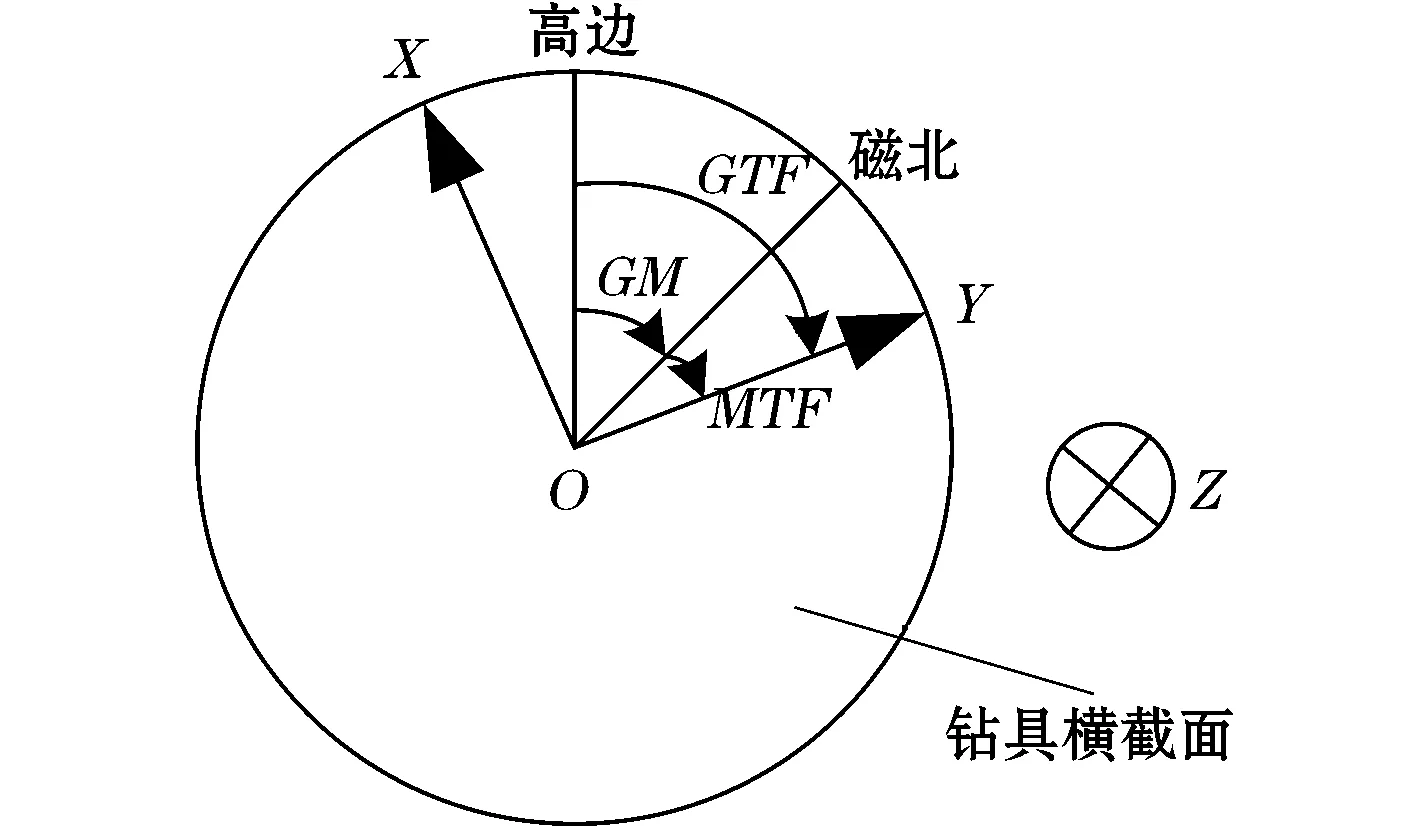
图2 GTF和MTF示意图
所以,计算两者差值GM时,可以设GTF=0°,则:
Hx=Mcosθsinβ,Hy=Mcosθcosβcosα-Msinθsinα
此时,磁工具面角为

(2)
迭代法的基本计算原理是:先合理假设1个方位角,然后根据测得的井斜角,利用式(2),计算出GTF和MTF的差值,然后,通过一次测量所得的磁工具面角MTF,算出高边工具面角,然后利用式(1)算出方位角,再将计算所得方位角带入循环计算,直至收敛到一定的误差范围内,流程图如图3所示。
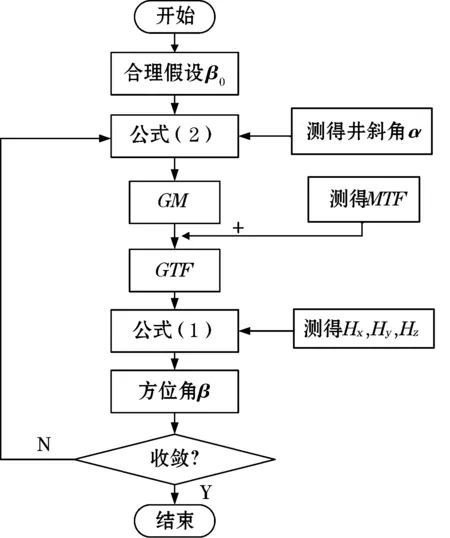
图3 迭代法流程图
1.2三角法
如图4所示,总磁场M在水平面上的投影为磁北方向,钻具轴线在水平面上的投影为井底方位线,两者之间的夹角即为方位角β.图中,α为井斜角,θ为磁倾角,β1为z轴与M间夹角。

图4 三角法示意图
设OB=OA=a,则:
AB2=OA2+OB2-2×OA×OBcosβ1=2a2-2a2cosβ1
AA′=acosα,BB′=asinθ
所以:
A′B′2=AB2-(acosα-asinθ)2
=2a2-2α2cosβ1-a2cos2α-a2sin2θ+2a2cosαsinθ
(3)
OA′=asinα,OB′=acosθ
三角形OA′B′中,有:
A′B′2=OA′2+OB′2-2×OA′×OB′cosβ
=a2sin2α+a2cos2θ-2a2sinαcosθcosβ
结合式(3)有:
(4)

式(4)即为求解方位角的三角法公式,利用此公式,就可以在不需要获得高边工具面的情况下,测得方位角。
2 方位角测量精度分析
假设三轴磁通门传感器的测量精度为50 nT(1σ),加速度计的测量精度为1 mg(1σ),分别分析3种计算方法的方位角测量精度。
2.1静态测量方位角精度分析
在非旋转工况下,一般使用式(1)进行方位角计算,现对其进行测量精度分析。
由式(1)可以得:
(5)
式中:M为总磁场;θ为磁倾角。
而:
δHv1=sinθgcosαδΗx+cosθgcosαδΗy+sinαδΗz+
(Hxcosθgcosα-Hysinθgcosα)δθg+
(Hzcosα-Hxsinθgsinθ-Hycosθgsinα)δα
δΗv2=cosθgδHx-sinθgδHy-(Hxsinθg+Hycosθg)δθg
带入式(5),可得:

(Hv1sinθg+Hv2cosθgcosα)δΗy-
Hv2sinαδΗz-[Hv1(Hxsinθg+Hycosθg)+
Hv2(Hxcosθgcosα-Hysinθgcosα)]δθg-
Hv2(Hzcosα-Hxsinθgsinα-Hycosθgsinα)δα}
(6)
故有:

(Hv1sinθg+Hv2cosθgcosα)2Var(Hy)+
(Hv2sinα)2Var(Hz)+[Hv1(Hxsinθg+Hycosθg)+
Hv2(Hxcosθgcosα-Hysinθgcosα)]2Var(θg)+
[Hv2(Hxcosα-Hxsinθgsinα-Hycosθgsinα)]2Var(α)}
(7)
由式(7)可知,方位角测量精度由三轴磁通门传感器测量精度、高边工具面角测量精度及井斜角测量精度决定。静态测量时,高边工具面角和井斜角按如下公式求得:
假设三轴上的加速度计精度相同,即:
Var(gx)=Var(gy)=Var(gz)=Var(g)
则有:
(8)
将式(8)带入式(7),再将磁通门传感器的测量精度带入,通过数值计算,可得到静态测量方位角的精度(1σ),如图5所示。
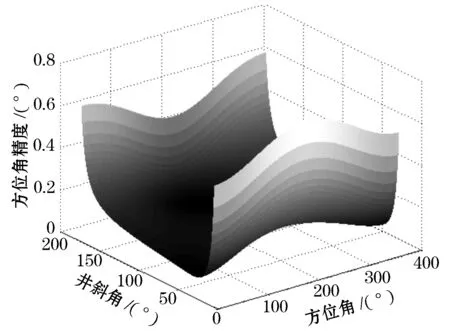
图5 静态测量方位角精度
由图5可知,方位角测量精度小于0.6°(α≥5°),且随着井斜角远离0°和180°,方位角测量精度变好。
2.2迭代法收敛性及测量方位角精度分析
迭代法是先根据假设的方位角和测得的井斜角,算出高边工具面角GTF和磁工具面角MTF的差值,再通过测得的磁工具面角反算出高边工具面角。具体如下:
(9)
GTF=GM+MTF
由式(9)可以得:

cosθsinβ′(cosθcosβ′sinα+sinθcosα)δα]+
(10)
式中:θg为高边工具面角GTF;θm为磁工具面角MTF;β′为计算GM时使用的方位角;Hxy为磁场在钻具横截面上的分量。
迭代法在得到高边工具面角后,计算方位角仍使用式(1),所以,计算所得方位角精度满足式(6),将式(10)带入式(6),得:

Hv2sinαδHz+(A1D1+B1)δα]
(11)

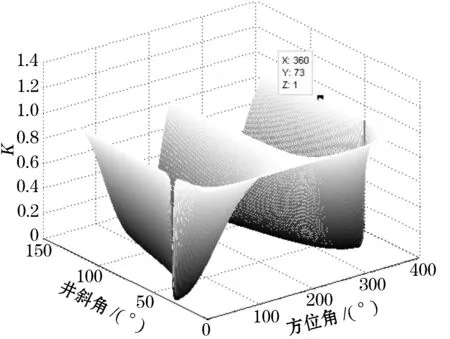
图6 数值计算K值
由图6可知,当方位角越接近0°或180°,或者井斜角越接近0°时,K值越大,且最大值为1;避开这几个特定的方位井斜时,K值较小,即迭代法适用。当迭代收敛时,有β′=β,即δβ′=δβ,所以式(11)可以进一步简化,则通过换算,可得:
(A1D1+B1)2Var(α)]
(12)
式(12)为旋转工况下,通过迭代法计算所得方位角的方差计算式。在旋转工况下,井斜角可简单由单轴(z轴)直接测量获得,计算公式为

(13)
故:
(14)
将其代入式(12),通过数值计算,可得不同方位角和井斜角下,方位角精度如图7所示。从图7可以看出,当井斜角很小或很大,方位角接近0°或180°时,方位角精度较差。

图7 迭代法计算所得方位角精度
若不考虑方位角精度较差的特殊区域,方位角精度能达到0.8°,如图8所示。
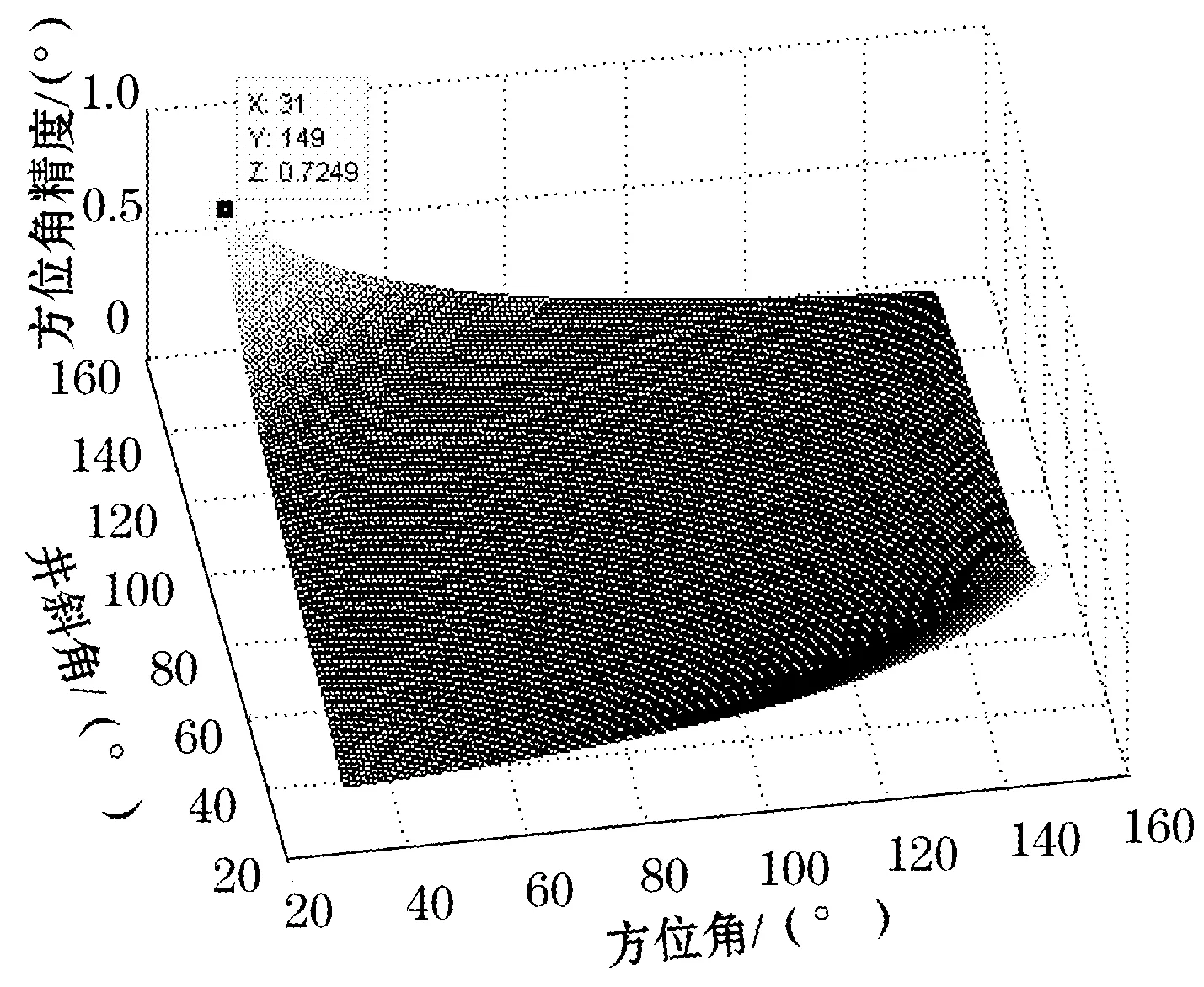
图8 局部方位角精度
2.3三角法测量方位角精度分析
由式(4)可得:
(sinβ1sinαcosθ)δβ1]
故有:
(sinθcosθ-cosβ1cosαcosθ)2Var(α)]
(15)
在旋转工况下,井斜角α由式(13)计算,其测量精度可由式(14)进行计算。而z轴和磁力线的夹角的计算公式如下:
假设三轴磁通门在3个方向上测量精度相同,即:
Var(Hx)=Var(Hy)=Var(Hz)=Var(H)
则:
(16)
将式(14)和式(16)带入式(15),通过数值计算,可以得到不同方位井斜下的测量精度,其图形与图7完全相同。再通过化简式(12),可以得出其与式(15)完全相同。由此可认为,收敛后的迭代法和三角法在本质上是完全相同的。
由于三角法是通过余弦求得方位角,所以直观分析可知,当方位角接近0°或180°时,精度较差,这从式(15)也可以得出,这与迭代法的性质完全相同。同时,由于三角法是通过余弦函数求得的方位角,所以,求得的方位角只是井底方位线与磁北的夹角,无法分辨是向东偏还是向西偏。在精度分析时无法确定迭代法是否也存在这一缺陷,但通过具体仿真分析可以验证这一点,这也进一步说明了两种方法的一致性。
3 方位角测量仿真分析
通过Matlab编程,仿真在同一井斜方位下,模拟不同工况,使用不同方法所测得的井斜角、方位角和高边工具面角,将其对比如表1所示。
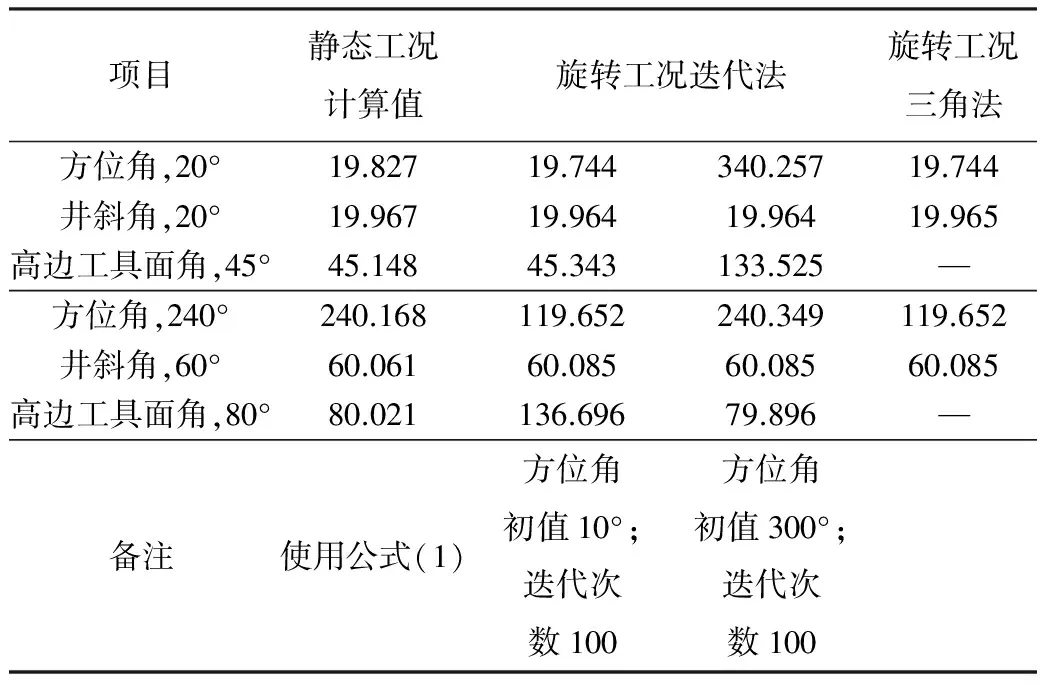
表1 3种方法仿真结果比较 (°)
由表1可知,在静态工况下解算出的方位角、井斜角和高边工具面角的精度都比较高,这是由于传感器的静态测量精度都很高;在旋转工况下,由于x和y方向的加速
度计的测量值无法进行滤波,且存在离心加速度,所以只认为z方向加速度计的测量值是有效的。仿真时,假定z方向加速度计和磁通门传感器在旋转工况下的测量精度与静态工况相同(实际较差)。对比迭代法和三角法,可以看出,两者的测量精度完全相同,不同的是,迭代法是先计算出高边工具面角,再计算方位角,而三角法是直接计算方位角。另外,迭代法的迭代结果与初始值有关,不同的初始值,导致最后结果的东西向不同,即其无法分辨是向东偏还是向西偏,这与三角法相同。
4 结论
在旋转工况下,讨论了迭代法和三角法。通过精度分析知道,这两种方法本质上是相同的。不同的是,迭代法需先计算出高边工具面角,而三角法是直接计算方位角。两者的缺陷均是无法分辨东西向,且在方位角为0°或180°或者井斜角很小时,精度很差。故在旋转工况下进行方位井斜测量时,需结合使用静态测量结果,进行东西向判别。
参考文献:
[1]徐涛.水平定向钻进随钻测量方法及定位技术研究:[学位论文].长沙:国防科学技术大学,2006.
[2]GUO H,YAO A G.Research and Design of Horizontal Directional Drilling Attitude Measurement System Based on ARM.ICPTT:Sustainable Solutions for Water,Sewer,Gas,and Oil Pipelines-Proceedings of the International Conference on Pipelines and Trenchless Technology,2011:586-603.
[3]谢子殿,朱秀.基于磁通门与重力加速度传感器的钻井测斜仪.传感器技术,2004,23(7):30-33.
[4]李星.导向钻井工具姿态的随钻动态测量:[学位论文].西安:西安石油大学,2009.
[5]GONG X F,YANG J,WANG W.Design of high accuracy orientation sensor of MWD.International Conference on Electric Information and Control Engineering (ICEICE),2011:297-300.
[6]EIGIZAWY M L.Continuous Measurement-While-Drilling Surveying System Utilizing MEMS Inertial Sensors.Calgary:University of Calgary,2009.