基于多传感器融合算法的CCD测温系统设计
2014-03-22杨友良董福涛
薛 飞,杨友良,董福涛
(1.河北联合大学电气工程学院,河北唐山 063000;2.东北大学,轧制技术及连轧自动化国家重点实验室,辽宁沈阳 110819)
0 引言
作为一种以电荷为信号载体的微型图像传感器,CCD在高温物体温度场实时监控方面得到了广泛应用[1]。由于受到如光学系统误差、CCD器件自带误差以及红外辐射干扰等因素影响,单CCD传感器测温系统得到的温度场信息并不十分准确[2]。多传感器CCD图像测温系统中的数据融合,是指对来自多个CCD传感器的温度数据进行多层次、多方面的综合、关联和估计。与传统单一的传感器模型相比,多传感器模型能够提高测量数据的可信度和可探测性,降低推理模糊度,增加温度特征维数,改善测温系统容错能力和自适应性[3]。
近年来,研究学者在利用数据融合技术改善CCD图像测温方法的研究上,做了很多有效尝试。美国NASA通过在CCD 上均匀布置不同光谱响应的探测芯片,将滤光片的作用整合到CCD 芯片上,融合计算出物体的温度分布[4]。俄亥俄州立大学与Potomac Fusion公司共同建立了基于扩展后JDL模型的融合开发框架用于温度测试的软硬信息融合算法[5]。这些方法仍处于实验验证阶段,并未投入到实际应用中。文献[6]提出的红外测温仪和面阵CCD测温仪的静态和动态融合测温方案,提高了连铸坯表面测温系统性能。但在算法改进方面并未做深入阐述。文献[7]针对面阵CCD测温系统复杂性及波长的不可选择性,提出了利用线阵CCD进行温度比色测量的方法。通利用自适应加权数据融合算法,使融合后的估计值得到优化。然而此算法具有冗余性,增加了计算复杂度。文献[8]提出了基于多源数据截尾加权融合算法的图像测量方法。利用CCD成像技术实时获取被测物体直径的几何参数并提高了测量精度。对于温度测量对象而言,此算法具有一定借鉴和参考意义。
文中基于截尾加权融合算法,设计了多传感器CCD 图像实时测温系统。CCD图像传感器通过中性滤光片,获取实验熔池表面的辐射亮度信息,根据比色测温法,计算熔池表面的比色温度。将不同光谱波长组合下的比色温度值作为多传感器的信息源,用截尾融合算法对测温值作数据融合处理。通过实验对比,验证方法的有效性。
1 CCD图像测温系统
1.1比色测温原理
当温度为Tc的黑体和温度为T的非黑体在2个波长λ1和λ2下的光谱辐射亮度之比相等时,定义黑体的温度Tc为非黑体的比色温度[9]。
L(λ1,T)/L(λ2,T)=Lb(λ1,Tc)/Lb(λ2,Tc)
(1)
式中Lb(λi,Tc)和Lb(λi,T)是黑体以及非黑体的单色光谱辐射亮度,W/(sr·m3)。
将式(1)带入维恩公式,经整理得:
(2)
式中C2为第二辐射常数,C2=1.438 8×10-2m·K.
(3)
1.2CCD传感器原理
CCD是一种能够把光学影像转化为数字信号的光学光电转换器件。它采用光学成像系统将景物图像成像在CCD像敏上,像敏面将照在每一敏元上的照度信号转变为少数载流子密度信号存储于像敏单元中,然后再转移到CCD的移位寄存器中,在驱动脉冲的作用下顺序地移出器件,成为图像信号[11]。CCD图像传感器由微型镜头、分色滤色片、感光层组成,如图1所示。

图1 CCD图像传感器的工作原理示意图
三原色理论指出:任何一种颜色可以通过红(R)、绿(G)、蓝(B)三色按照不同比例合成产生[12]。在CCD的图像信息还原过程中,分色滤色采用的主要是Bayer方式滤色模型,即R-G-B-G,4个单元为一组。图像信号的混色亮度等于R、G、B各色亮度之和,根据R、G、B三色分量比例来还原彩色。由此可知:光源线越强,光子转换电子的数量就越多,电子经过分色滤色片后,由感光层的电信号还原图像所对应的RGB值分量就会对应的发生改变。彩色CCD相机R、G、B三通道对应的RGB值与光强关系可由如下公式表示:
R=a1L+a2L2+a3L3+a4L4
(4)
G=b1L+b2L2+b3L3+b4L4
(5)
B=c1L+c2L2+c3L3+c4L4
(6)
式中:R、G、B为数字存储图像中任意像素的红、绿、蓝三通道的值;a1~a4,b1~b4,c1~c4为已知系数;L为光照强度。
在实验过程中,如果滤光片将光波长λ固定,当CCD测得热辐射光在特定波长下的光强,即可利用式(3)得到热辐射体的温度。
1.3系统硬件结构
系统硬件结构如图2所示。系统由两部分组成:温度控制部分和CCD测温部分。

图2 CCD测温系统原理图
温控部分中,系统由SRS13A型温度控制器来调节实验中加热炉的温度;热电偶将采集到的实验熔池表面温度值,通过RS232串口实时返回到计算机中,即作为CCD图像测温的标定温度。CCD测温部分中,选用PIKE F145C型CCD摄像机。保护玻璃用来防止光积分时间过长或者光强度过高,使CCD势阱中的电荷饱和并出现电荷“溢出”,从而破坏单色辐射亮度与CCD三色通道输出信号的对应关系。根据中性滤光片可扩大CCD测温范围的原理[13],滤光片切换系统选用6个波长相近的滤光片安装在1个圆周上,各滤光片中心位于同心圆上。在马达的带动下,将不同波长的滤光片交替置于光路中,供CCD摄取不同波长下的熔池表面辐射亮度图像。MV-1394B型图像采集卡将图像信息采集到计算机中。将每2个滤光片下的辐射亮度值作为已知参量,最终用比色测温法计算被测物的温度值。
2 多传感器数据融合测温系统
由于CCD对于RGB三基色的灵敏度有所不同,所以测温系统在不同滤光片下,组合输出的比色温度值与真实值之间均具有不同的偏差。为了获得更高的测量精度,系统利用多传感器数据融合算法,对测温系统进行优化。
2.1系统功能结构
数据融合技术涉及数据采集、特征提取和推理决策3个环节,文中给出如图3所示的多传感器CCD测温系统功能结构图。该系统结构分为3层:数据层、特征层和决策层。数据层主要完成在各波长滤光片下的辐射亮度图像的摄取,以及图像增强等数据的预处理,为特征层数据整理提供可靠依据;特征层主要对来自CCD的图像数据进行分类,提取亮度信息,以提高决策层的数据处理效率;决策层分别计算出不同滤光片组合下的比色温度,然后将这些温度进行数据融合处理,最终得到更精确的温度测量值。

图3 多传感器CCD测温系统功能结构图
2.2多传感器数据截尾加权融合算法

(7)
截尾均值是一种典型的L估计量,它通过给样本排序,截掉每一侧尾部并计算其所占样本比率a来估计。对于样本容量为10的样本,它的20%截尾均值是在切掉2个最小测量值和2个最大测量值之后余下的6个 测量值的平均值。有时为了得到更精确的规定数量的截尾均值,需要切掉一个测量值的一部分,例如样本容量为10的5%的截尾均值,需要截掉最大测量值和最小测量值各一半,把切剩下的部分相对于原来未截取以前的测量值给以分数权重。
在样本容量为n的样本次序统计量x1≤x2≤…≤xn中,截尾率a满足0≤a≤0.5,记M为不超过an的最大整数,令r=an-M是an的分数部分,则它的权重w1,w2,…wn由式(18)给出:
(8)

(9)
3 实验分析
利用连接热电偶的温控系统作为标定设备,在熔池表面温度T1=600 ℃、T2=700 ℃、T3=800 ℃、T4=900 ℃、T5=1 000 ℃时,用CCD摄像机通过6个滤光波长为λ1=420 nm、λ2=480 nm、λ3=540 nm、λ4=600 nm、λ5=660 nm、λ6=720 nm的滤光片,对熔池的进行拍摄。以1 000 ℃为例,各滤光片下图像如图4所示。

图4 1 000 ℃下熔池表面照片
利用计算机,求出每张图片的中心亮度并以每2个滤光片为1组,利用式(3)分别计算15组传感器的比色温度值。计算结果如表1所示。
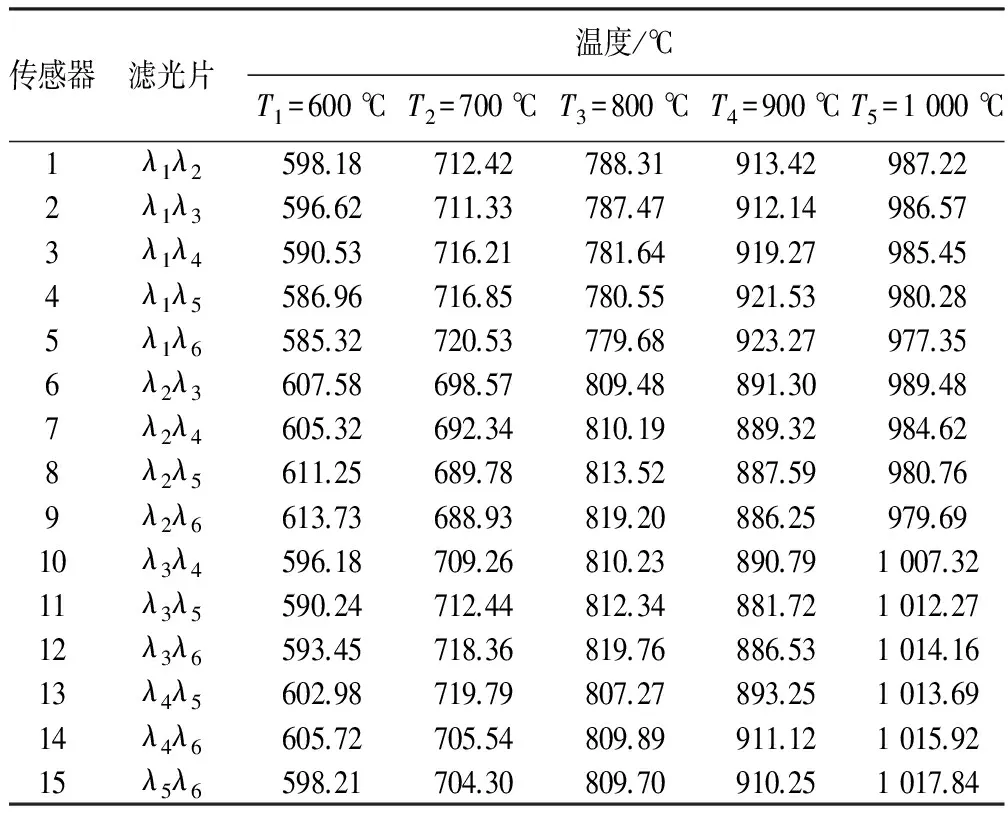
表1 在不同目标温度Ti下的多传感器比色温度值
根据式(9),取不同的截尾率(a=0.05~0.45)并对不同目标温度条件下(T1=600 ℃,T2=700 ℃,T3=800 ℃,T4=900 ℃,T5=1 000 ℃)的温度测量数据进行截尾加权融合处理,求出温度最终的融合估计值。最后求得估计值与目标值的均方误差,结果如表2所示。

表2 不同目标温度Ti下的多传感器数据融合估计值
通过表2分析可知:当截尾率a以0.05的变化量逐渐递增时,估计值与真实值的误差呈逐渐变大趋势;当目标温度为900 ℃、截尾率0.25≤a≤3时,估计值具有双向偏离真实值的变化趋势;而当a=0.3时,融合结果最接近目标温度值T4。
为进一步验证算法的有效性,文中用Matlab以文献[7]的方法对表1的测量数据进行自适应加权融合算法处理。实验计算机主频2.27 GHz,内存为2 GB,Matlab软件版本为R2008a.各项测量指标如表3所示,两种算法的比较如图5所示。
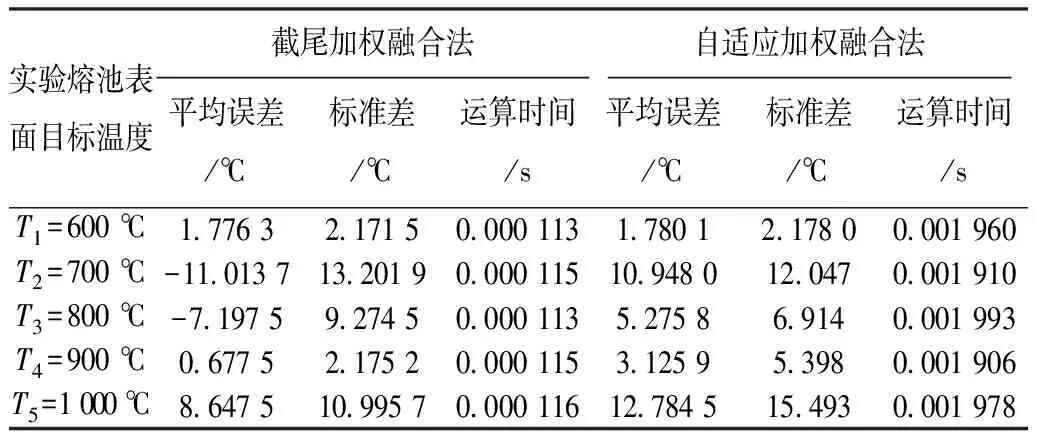
表3 截尾加权和自适应加权融合算法各项测量指标

(a)平均误差比较
通过表3以及图5可以看出:
(1)在算法精度上,当被测温度在700 ℃以下时,两种算法平均误差和标准差相差不大;当被测温度在900 ℃以上时,截尾加权融合算法比自适应加权融合算法的平均误差和标准差更小,误差率始终保持在±2%以内。说明截尾算法在超高温测量时,不仅误差扰动小且具有更高的测量精度。
(2)在算法效率上,自适应加权算法计算量大,运算速度缓慢,对于有15个传感器的CCD实时性测温系统而言,复杂运算所带来的时间延迟是不可忽视的缺陷。而截尾加权融合算法,计算步骤简单,运算速度快,平均处理速度是自适应算法的18倍。
4 结束语
文中研究了多传感器数据融合算法在CCD图像测温系统中的应用。通过不同目标温度下的测温实验表明,该系统在900 ℃以上高温测量时误差扰动小,测量精度高,误差率始终保持在±2%以内。截切尾加权和自适应加权融合算法的对比实验证明,截尾算法在超高温测量应用中,具有更出色的数据融合效果,以简单直观的数学模型,获得了更快的数据处理速度。实现了截尾加权融合算法在CCD图像测温中的应用,也为改善测温系统实时性能提供了有效解决方案。
参考文献:
[1]MOON-HYUN L,HANHOON P,IN R,et al.Fast model-based multispectral imaging using nonnegative principal component analysis.Optics Letters,2012,37(11):1937-1939.
[2]KHALEGHI B,KHAMIS A,KARRAY F O,et al.Multisensor data fusion:a review of the state-of-the-art.Information Fusion,2013,14(1):28-44.
[3]米本和也.CCD/COMS 图像传感器基础与应用.北京:科学出版社,2011:10-21.
[4]SOLIBEL A,BANDARA S V,TING D Z,et al.A super-pixel QWIP focal plane array for imaging multiple waveband temperature sensor.Infrared Physics and Technology,2009,52 (6):403-407.
[5]HALL D L,GRAHAM J,MORE L D,et al.Test and evaluation of soft/hard information fusion systems:a test environment,methodology and initial data sets.Proceedings of the 13th International Conference on Information Fusion.Edinburgh:IEEE Computer Society,2010:1-7.
[6]杨嘉义.基于多传感器数据融合的铸坯表面温度测量系统设计:[学位论文].沈阳:东北大学,2010.
[7]郑德忠,周颖慧.加权实时数据融合在线阵CCD测温中的应用研究.光学技术,2007,33(2):230-232.
[8]胡尊凤,党宏社.基于切尾加权融合算法的多传感器CCD测量系统.计算机测量与控制,2008,16(6):752-762.
[9]戴景民.多光谱辐射测温理论与应用.北京:高等教育出版社,2002:5-10.
[10]戴景民,宋扬,王宗伟.光谱发射率测量技术.红外与激光工程,2009,38(4):710-715.
[11]王清泉,李旭宇,张茂林.基于CCD的多浊度快速检测技术.仪表技术与传感器,2013(1):97-100.
[12]黄洁,张轲,朱晓鹏,等.基于RGB数字滤光的CCD激光熔覆测温系统的标定.光电子激光,2013,24(5):967-974.
[13]张晓颖,段中华,李向昭,等.基于MSP430G2553的光纤传感高温测量系统.仪表技术与传感器,2013(9):52-54.