一种新型爬壁机器人的研究
2014-03-18张捷袁祖强吴航
张捷,袁祖强,吴航
(1.南通理工学院机电工程学院,江苏南通226002;2.南京工业大学机械与动力工程学院,江苏南京211816)
0 前言
爬壁机器人是特种机器人的一种,能够在垂直壁面、球面等场合攀爬行走,并搭载相应的设备,实现壁面的清洗、探伤、管道敷设、油漆等多种功能。近年来在石化工业对圆柱形或球形压力容器的内外壁面进行检查、喷漆防腐等方面应用逐渐增多。
国外爬壁机器人发展较早,早在20世纪60年代,日本就研究出了世界上首台爬壁机器人样机[1]。随后德国、以色列等国家也相继开始爬壁机器人的研究工作,至今已研制出各种形式的爬壁机器人样机,包括飞行机器人、多足机器人、多吸盘机器人和“腿轮”机器人等。直到1988年,在国家“863”高技术计划的支持下,国内自行设计并研制的第一台壁面爬行式遥控检查机器人(BH-1)在哈尔滨工业大学机器人研究所诞生,它是为我国的核电站而研制的,随后又研制成功了磁吸附和真空吸附两个系列的5 种型号壁面爬行机器人。90年代之后上海大学、北航和上海交大也相继开始研究,并取得相应成果。
从国内外研究现状来看,爬壁机器人主要具有壁面吸附和壁面移动两大功能,根据这两大功能可对爬壁机器人进行分类,按照吸附方式爬壁机器人可分为:
(1)真空吸附爬壁机器人[2]。此类机器人一般带有一个或几个负压吸盘,在吸盘内部产生一定的真空度从而能够吸附于壁面上,其结构简单,允许吸盘气体少量泄露,但无断电延续性,断电后易失去吸力,且避免适应性差,只能用于表面相对光滑的壁面,多用于玻璃墙面。
(2)磁吸附爬壁机器人[3-4]。又可细分为永磁吸附和电磁吸附,此类机器人靠永磁体或电磁体吸附在导磁材料表面,优点是吸附力大,但仅适用于铁磁性材料壁面。
(3)推力吸附爬壁机器人。此类机器人靠螺旋桨高速旋转产生推力贴附在壁面上,它移动速度快,对壁面形状、材质适应性高,但其控制复杂,体积大,噪声大。
(4)仿生机构吸附爬壁机器人[5-6],此类机器人模仿昆虫的脚掌利用尖爪、软垫和刚毛等方式提供吸附力,特点是外形小巧,结构简单,对壁面形状、材质适应性高,负载小,但其研究尚不成熟。
按照移动方式爬壁机器人可分为:
(1)车轮式爬壁机器人[7]。车轮式移动速度快、控制灵活,尤其转向比较容易实现,但车轮与壁面接触面积小,因而维持一定的吸附力较困难。
(2)履带式爬壁机器人[8]。履带式对壁面的适应性强,接触面积大,吸附力强,运动速度较快,但不易转向和壁面过渡。
(3)脚足式爬壁机器人。多足步行式吸附力较强,易于跨越障碍,可灵活实现壁面过渡和转向等功能,但移动速度慢,各足的运动协调性要求较高,控制难度高。
(4)复合式爬壁机器人[9]。兼有以上几种形式爬壁机器人的优点,但结构复杂,控制难度高。
大型压力容器壁面多为圆柱面和球面,需要考虑吸附表面的弧度。传统爬壁机器人很容易出现接触不良和悬空状况,文中提出一种新型爬壁机器人结构,适用于石化行业的圆柱形或球形压力容器壁面爬行。
1 机器人本体结构设计
1.1 吸附方式选择
设计所针对的材质基本上是铁磁性材料,所以吸附方式可以选择电磁吸附或永磁吸附。电磁吸附和永磁吸附在铁磁性材料壁面上都可以提供较大的吸附力,但是电磁吸附设备尺寸大,并需要携带电线提供较大的电力,为了使爬壁机器人结构尽量紧凑,运动灵活,该设计采用稀土永磁吸附。
稀土永磁材料是稀土金属和过渡族金属的合金制成的永磁材料,第三代永磁材料钕铁硼(NdFeB)磁体磁能积高,被称作当代“永磁之王”。钕铁硼系列中的Nd15Fe77B8具有较高的内禀矫顽力和较好的抗老化退磁性能,可以保证系统长期稳定地工作,非常适合爬壁机器人的工作环境,其性能见表1。
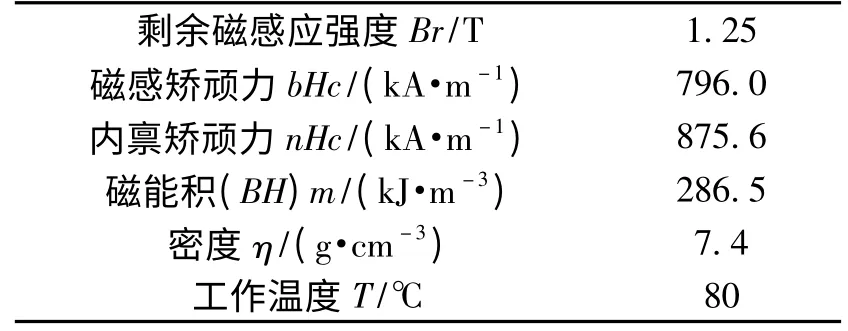
表1 钕铁硼磁体Nd15Fe77B8 的性能参数
1.2 移动机构设计
大型压力容器壁面多为圆柱面和球面,需要考虑吸附表面的弧度。目前现有的轮式爬壁机器人都是四轮结构,比如张立国等[10]设计的一款立式金属罐容积检定爬壁机器人,如图1所示,四方形支承板和4个轮子组成的车身。此类型爬壁机器人在弧面上爬行时很容易造成三轮接触、一轮悬空的状态,从而导致运行不稳定。履带式爬壁机器人一般都是两条履带结构,比如唐浩设计的船舶壁面除锈爬壁机器人[11],如图2所示,是以两条长履带作为移动机构,同样会造成接触不稳定状况。
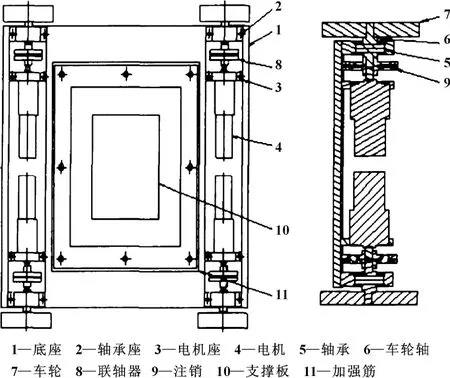
图1 轮式爬壁机器人结构图
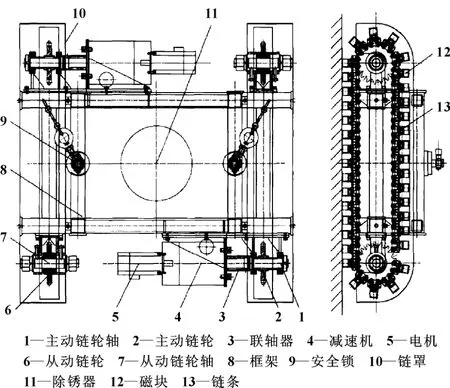
图2 履带式爬壁机器人结构图
针对以上情况,设计一种新结构,可有效应对圆柱面或球面,如图3所示,采用三角式车身,2 个三角履带前轮和一个万向后轮移动机构,由三点确定一个平面定理可知,此爬壁机器人能稳定地贴附在圆弧表面。磁铁做成小块镶嵌在履带上,同时后轮采用钕铁硼材料做成磁轮,磁体直接与壁面接触,与磁隙式结构相比吸附更加可靠。此外,三角履带轮结构首次被应用在爬壁机器人上,它兼有履带式爬壁机器人和轮式机器人的优点,并消除了他们的缺点,解决了接触可靠和转向灵活之间的矛盾。可概括为三角履带轮式爬壁机器人具有壁面适应性强、接触面积大、吸附力强和移动速度快、控制灵活、转向比较容易等优点。
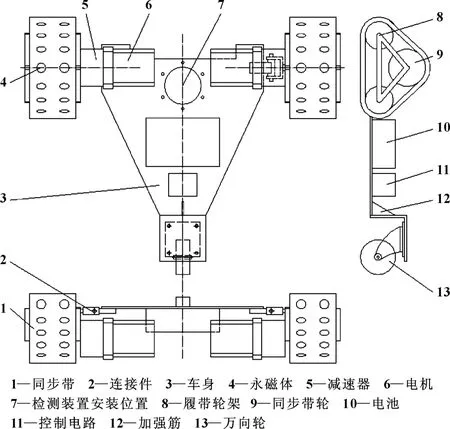
图3 三角履带轮式爬壁机器人
1.3 机器人Pro/E 三维建模
利用Pro/Engineer 中的【拉伸】、【旋转】、【扫描】、【镜像】等操作完成各零件的建模,再通过组装得到爬壁机器人的实体造型。如图4所示,从放大图可以看出,三角履带轮与车身的连接采用了两个旋转副,从而三角履带轮有两个摆动自由度,有利于爬壁机器人适应不同弧度的壁面。
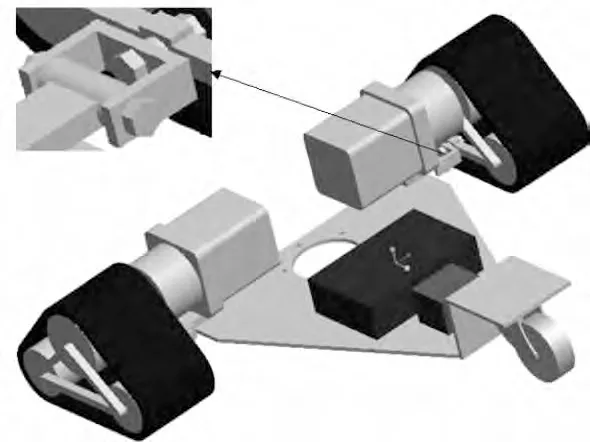
图4 爬壁机器人三维模型
2 机器人吸附时静力分析
由于爬壁机器人是在高空进行工作,设计时必须考虑安全性能。爬壁机器人在工作时可能有两种危险情况:一是机器人从壁面滑落;二是机器人在壁面上倾覆。对机器人吸附在壁面上时的静力分析是为了计算可靠性吸附的条件。图5 是爬壁机器人静止吸附在壁面上的受力分析图。
2.1 滑落情况计算
爬壁机器人静止在壁面上时,两个三角履带轮被制动,万向轮仍是不受约束,所以摩擦力是由两前轮提供。两前轮永磁体吸附力分别为P1,P2,后轮吸附力为P3。
x 方向:N1=P1,N2=P2,N3=P3
y 方向:G0+G1+G2-F1-F2=0
F1≤f静N1,F2≤f静N2
可见是否滑落,与吸附力和摩擦因数有直接关系。当然,在增大吸附力和摩擦因数的同时也得考虑采用合适材料减轻车体质量。
式中:N1、N2、N3分别为壁面对3 个轮子的弹力;
G0为车身后轮和负载总重,G1、G2为两前轮质量;
F1、F2、F3为车轮与壁面间的摩擦力;
f静为车轮与壁面的静摩擦因数。
2.2 倾覆情况计算
由于爬壁机器人后轮万向轮始终不受约束,所以在机器人往上运动时不会倾覆。最容易倾覆应该是发生在机器人往下运动时,车身会绕三角履带轮与车身连接处倾覆,不发生倾覆的条件是对连接点的吸附力矩大于重力力矩。
即:N3(L1+L2)≥G(d2-d1)
可见加长车身长度和减小车身和负载重心到壁面距离有利于防止机器人倾覆,也就是要使得机器人在运行中尽量贴紧壁面。
式中:d1、d2分别为连接铰链和车身与负载的重心到壁面的水平距离;
L1、L2分别为车身与负载的重心到连接铰链和后轮中心的竖直距离。
3 动力学仿真研究
3.1 仿真模型建立
将Pro/E 建好的爬壁机器人三维实体模型通过Parasolid 的数据格导入到Adams/View 环境下,如图6所示。设置Adams/View 中单位、工作网格和重力等工作环境,重新编辑各组件的名称、颜色、材料属性等信息,并根据实际情况定义各组件间的约束,包括固定副和旋转副等。此外,建立一个传统爬壁机器人模型,以便用来做仿真对比。
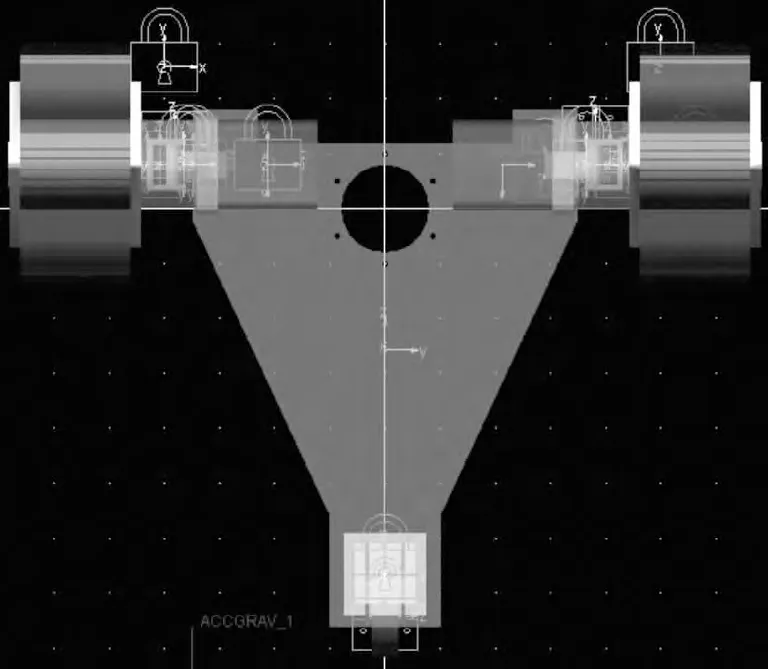
图6 爬壁机器人虚拟样机模型
3.2 圆柱面运动仿真
将传统四轮式爬壁机器人和文中所述的新型爬壁机器人同时置于半径为2 m 的圆柱面上,设置好运动约束和接触,以6 m/min 的速度斜向上运动,仿真时间为1 s。为了得出两种机器人与壁面贴合情况,测量出运动过程中各轮与壁面间的距离大小。图7 为四轮式爬壁机器人的4 个车轮与壁面的距离测量曲线,可见,有两个车轮(轮1 和轮3)与壁面接触良好,另外两轮(轮2 和轮4)则呈相反状态,即轮2 接触时轮4 悬空、轮4 接触时轮2 悬空。这与事实相符,在曲面上运动时,四轮式爬壁机器人必然有一个轮子悬空。图8 为文中爬壁机器人的3 个车轮与壁面的距离测量曲线,3 个轮子与壁面接触良好,不存在车轮悬空现象,且比图7 中曲线平缓许多,说明文中爬壁机器人爬行稳定,与壁面贴合可靠。
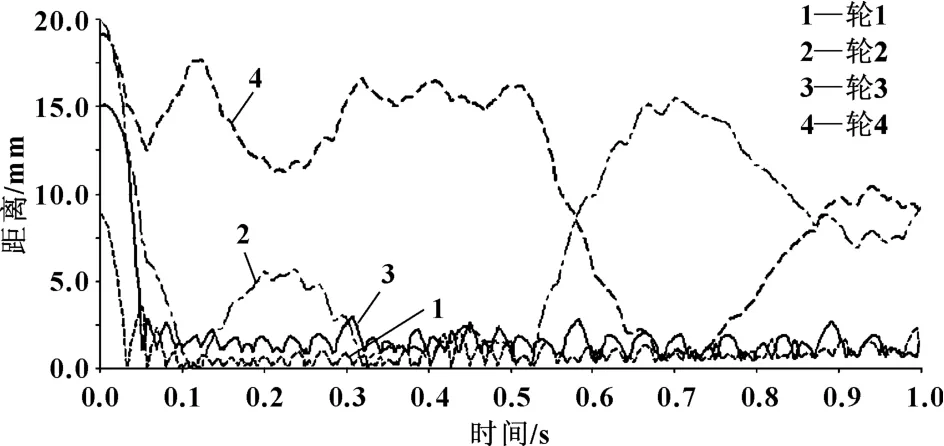
图7 四轮式爬壁机器人的4 个车轮与壁面的距离测量曲线
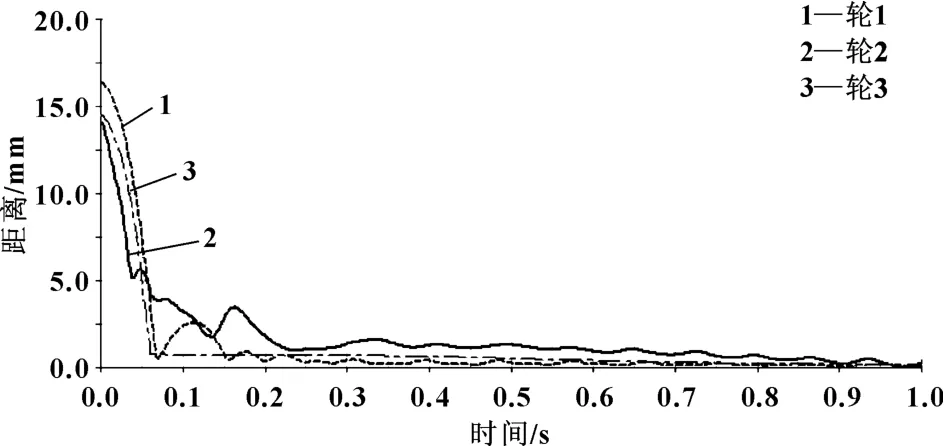
图8 三角履带式爬壁机器人的3 个车轮与壁面的距离测量曲线
3.3 爬越焊缝仿真
压力容器设备的焊缝对爬壁机器人来说是常见的障碍,能否安全稳定地越过焊缝尤为重要。在平面上建立余高为5 mm 的焊缝,传统四轮式爬壁机器人和文中新型爬壁机器人以6 m/min 的速度越过焊缝。
图9、10 分别是两种爬壁机器人爬越焊缝时车身沿垂直于壁面方向的加速度变化对比曲线和车身与车轮连接铰链处冲击力对比曲线,从图中可以看出,传统四轮式爬壁机器人的圆柱车轮在越过焊缝时的车身最大加速度580 mm/s2,是文中所述新型爬壁机器人的2 ~3 倍;另外在前轮越过焊缝后,新型爬壁机器人车身可以很快恢复平稳,而传统四轮式爬壁机器人车身却不停振动。可见文中所述机器人越障时冲击小,且抗振性能优越。
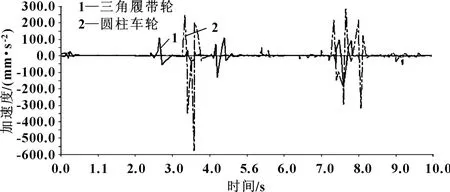
图9 两种爬壁机器人爬越焊缝时车身的加速度变化对比曲线
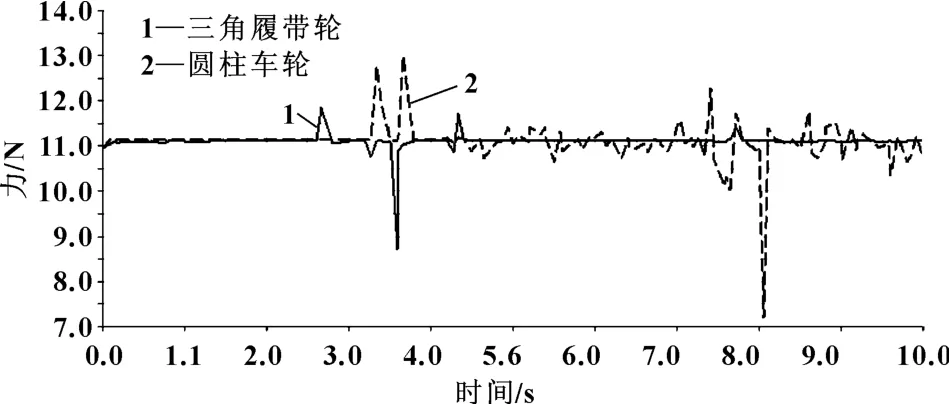
图10 两种爬壁机器人爬越焊缝时车身与车轮连接铰链处冲击力对比曲线
4 结论
鉴于化工设备圆柱壁面和球面的无损检测,提出了一种新型爬壁机器人。对机器人进行了机构设计、静力分析和圆柱面爬行与跨越焊缝仿真,并与传统四轮式爬壁机器人进行对比。仿真结果表明:机器人能够在圆柱壁面和球面平稳地完成预期动作,并具有壁面适应性强、运动灵活、具备一定越障能力及无需外接电线等特点。
[1]NISHI A.A Biped Walking Robot Capable of Moving on a Vertical Wall[J].Mechatronics,1992(6):543-554.
[2]HILLENBRAND C,SCHMIDT D,BERNS K.CROMSCI:Development of a Climbing Robot With Negative Pressure Adhesion for Inspections[J].Industrial Robot:An International Journal,2008,35(3):228-237.
[3]张俊强,张华,万伟民.履带式爬壁机器人磁吸附单元的磁场及运动分析[J].机器人,2006,28(2):219-223.
[4]桂仲成,陈强,孙振国.多体柔性永磁吸附爬壁机器人[J].机械工程学报,2008,44(6):177-182.
[5]王田苗,孟偲,裴葆青.仿壁虎机器人研究综述[J].机器人.2007,29(3):290-297.
[6]管兴伟,张昊,吉爱红,等.爬壁机器人尖爪型仿生脚掌设计[J].机电工程,2009,26(2):1-2,8.
[7]CAMPION G,BASTIN G.D'Andrea-Novel B.Structural Properties and Classification of Kinematic and Dynamic Models of Wheeled Mobile Robots[J].Robotics and Automation,1996,12(1):47-62.
[8]WONG J Y,CHIANG C F.A General Theory for Skid Steering of Tracked Vehicles Confirm Ground[J].Journal of Automobile Engineering,2001,215(3):343-354.
[9]刘爱华,王洪光,房立金,等.一种轮足复合式爬壁机器人机构建模与分析[J].机器人,2008,30(6):486-490.
[10]张立国,肖军,佟仕忠,等.立式金属罐容积检定爬壁机器人本体设计[J].工业仪表与自动化,2010(2):37-41.
[11]唐浩.船舶壁面除锈爬壁机器人的研究[D].大连:大连海事大学,2008.
