带落角约束与控制约束的纵向制导律①
2014-03-15王松艳
董 晨,晁 涛,王松艳,杨 明
(哈尔滨工业大学 控制与仿真中心,哈尔滨 150080)
0 引言
攻击地面目标的飞行器在保证终端脱靶量满足指标要求的同时,还要根据目标类型达到特定的落角,以获得最佳的毁伤效果。这种需求促使带落角约束的制导问题得到广泛研究。目前,研究的制导律包括改进的比例导引律、最优制导律、变结构制导律及复合制导律等[1]。改进的比例导引律是通过在经典的比例导引律中增加偏置项[2]、引入变比例系数[3]等方法实现终端角度约束,对制导输入信息要求较少,易于工程实现。最优制导律是在一定的假设和简化基础上,将带落角约束的制导问题转化为带终端约束的最优控制问题,并利用最优控制方法得到的[4-6]。最优制导律能够得到显式的制导方程,算法较简单,但对模型的精确性要求较高,且推导过程中的简化与假设限制其应用范围。为此,利用变结构控制具有的强鲁棒性,根据落角约束设计滑动模态,推导得到变结构制导律[7-9]。变结构制导律能有效抑制参数摄动和外部扰动,但存在抖震现象,降低制导精度与性能[10]。复合制导律则通过将若干种制导控制方法相结合,产生较好的制导效果,如最优变结构制导律[11]、神经网络自适应制导律[12]等。然而,目前对同时考虑落角约束和控制约束的制导问题鲜有研究。在末制导阶段飞行器的航向一般已对准目标,在保持航向的同时,制导系统会给出较大幅值的攻角指令,使飞行器在纵向平面内快速下降,并获得期望落角。但由于结构强度、气动特性等因素的制约,攻角指令存在幅值限制。因此,有必要对带落角约束和控制约束的纵向制导问题进行研究,在控制受限的情况下保证终端脱靶量和落角满足指标要求。
针对带落角约束与控制约束的制导问题,本文提出一种攻击地面固定目标的纵向制导律。利用非线性系统的反馈线性化和坐标变换得到用于制导律设计的线性模型。在此基础上,将制导问题转化为存在控制饱和的线性定常系统的镇定问题。基于参量Lyapunov方程方法为该线性系统设计低增益状态反馈律,推导得到带落角约束和控制约束的纵向制导律。给出制导律参数的在线整定方法,保证视线角及其转率在一定时间内分别收敛至期望落角和零,且控制约束得到满足。以某飞行器为例,针对多种攻击任务,利用数值仿真验证本文提出制导律的有效性。
1 带落角约束和控制约束的制导问题
1.1 质心运动、弹目运动及制导律设计模型
假设平面地球,并忽略地球自转和飞行器侧向运动,以时间t为自变量,惯性系下的飞行器纵向质心运动方程[13]如下所示:
(1a)
(1b)
(1c)
(1d)
式中v、θ、x、y分别为速度、弹道倾角、水平方向位置、高度;m为质量;g为重力加速度;L与D分别为升力和阻力,L=ρv2SrefCL(α,Ma)/2,D=ρv2SrefCD(α,Ma)/2;Sref为参考面积;ρ为大气密度,由标准大气(1976美国)模型计算;CL、CD分别为升力系数与阻力系数,是攻角α和Ma的函数,由拟合多项式计算。
不失一般性,设地面固定目标位于惯性系(x-y)原点,飞行器初始位置在惯性系的第二象限内,则弹目距离r及其对时间的导数、视线角λD及其对时间的导数可通过下式计算:
(2a)
(2b)
(2c)
(2d)
记常量λD*为期望落角,基于式(2c)与式(2d)取坐标变换:
(3)
可得线性制导律设计模型:

(4a)
(4b)
其中,控制量u为
(4c)
x与y的二阶导可通过质心运动方程(1)得到:
(4d)
1.2 制导问题描述
带落角约束和控制约束的制导问题转化为存在输入饱和的线性定常系统的镇定问题。
设计控制律,使系统
(5)
的状态由初值Z0收敛至原点。
定义Uu为
Uu={u∈|umin≤u≤umax}
(6)
(7)
其中,umax与umin可由式(4c)与式(4d)根据气动数据及攻角的允许范围计算。
2 带落角及控制约束的制导律
2.1 基于参量Lyapunov方程的制导律设计
针对所描述的制导问题,通过一个定理给出基于参量Lyapunov方程的制导律设计方法,得到带落角和控制约束的制导律。在给出定理及证明前,首先给出如下的引理。
引理(基于PLE的低增益反馈)[14]对存在控制饱和的线性系统:

(8)
其中,x∈n,u∈m,饱和函数sat():m→m。设(A,B)可控且A的所有特征值均位于虚轴上,则如下的一组低增益状态反馈律
u(t)=-R-1BTP(γ)x(t),γ>0
(9)
以不低于e-(γ/2)t的收敛速率半全局镇定系统(8)。其中,P(γ)=W-1(γ),W(γ)为PLE
(10)
的唯一正定解,即对于任一给定的有界集合X∈n,存在γ*>0,使得对任意γ∈(0,γ*),闭环系统是渐进稳定的,X位于吸引域中,且闭环系统状态收敛至原点的速度不低于e-(γ/2)t。
基于引理,由如下的定理给出带落角约束及控制约束的制导律,使飞行器的视线角转率收敛至0,同时视线角收敛至期望的落角,且收敛速率可通过取合适的制导律参数保证。
定理(带落角约束及控制约束的制导律) 对于所描述的制导问题,制导律
(11)
使视线角及视线角转率以不低于e-(γ/2)t的速度分别收敛于期望落角λD*和0。其中,γ为可调的制导律参数,aLOSy为总加速度在视线坐标系y轴的分量。
证明:易知总加速度在视线坐标系y轴的分量为
(12)
联立式(11)与式(12),整理可得
(13)
基于式(3),取坐标变换方程:
(14)
将式(2)与式(4d)代入式(13),并利用式(14)进行坐标变换,经整理有
(15)
取R=1,I∈2×2为单位阵,式(15)满足:
(16)
其中,P(γ)∈2×2为
∀γ>0
(17)
取W(γ)=P(γ)-1,则
(18)
易知,W(γ)为PLE(10)的唯一正定解。结合系统(5)可见,式(16)为系统(5)的低增益状态反馈律。系统阶数n=2,控制量数m=1,(A,B)可控,且A的2个特征值λ1,2(A)=0(均位于虚轴上)。由引理,状态反馈律(16)以不低于e-(γ/2)t的速率半全局镇定系统(5)。因此,制导律(11)使视线角及视线角转率以不低于e-(γ/2)t的速度分别收敛于期望落角和零。
注1(系统状态的收敛时间) 不失一般性设初始时刻为0,∀γ>0,则式(5)与式(16)构成的闭环系统可由如下的二阶常系数齐次线性微分方程描述:
(19)
该微分方程特解为
(20)
记z(t)的收敛时间为tγ,|z(t)|≤δ,∀t≥tγ,δ为一给定的小正数。tγ为γ的函数,但函数|z(tγ)|-δ=0不存在解析解。由z(t)的收敛速度随γ单调递增可知,tγ随γ单调递减,故tγ可由数值算法快速计算。
注2(与最优制导律比较) 由带落角约束的最优制导律[1]整理可得
(21)
(22)
对比式(21)与式(22)可见,本文提出的制导律与最优制导律有相同的反馈项,2种制导律计算所需的信息是一致的;本文的制导律可由参数γ调整制导律中视线角速率与视线角偏差的权重,参数γ对制导的影响将在第3节中做具体分析。
2.2 制导律参数在线整定
在得到如式(11)所示制导律后,需要确定制导律参数γ,使得系统(5)的状态由初值收敛至原点,且控制量满足约束条件。
参数γ影响控制量的幅值以及系统状态收敛的速度。若要以期望的落角击中目标,需使收敛时间小于等于飞行时间,则γ应取足够大的值;但增大γ会使控制量增大,可能导致控制饱和破坏闭环系统的稳定性[15]。此外,攻击阶段的飞行状态大范围急剧变化,采用常值γ难以获得良好的制导效果。故需要对制导律参数γ进行在线整定,权衡对收敛时间和控制量的要求,获得最佳的制导效果。
为此,给出制导律参数在线整定方法。制导律参数整定原理如图1所示。
图1 制导律参数整定
在参数整定过程中,对控制未饱和与控制饱和情况作如下处理。
(1)当控制未饱和时,取参数整定方程
tr(γ)-tg=0
(23)
由式(23)整定制导律参数γ,使由式(5)与式(16)构成的闭环系统的状态在终端时刻收敛至原点,进而保证终端视线角等于期望落角,且视线转率为零。
(2)当控制饱和时,取参数整定方程
(24)
其中,us为控制饱和时起作用的控制量边界值(umax或umin),方程(24)的2个解为
(25)
取γ1,2中大于零的解作为控制饱和时的制导律参数γ,保证控制量满足约束条件的限制。
基于整定后的制导律参数γ,由式(11)计算制导指令。制导律(11)得到的是总加速度在视线坐标系y轴上的分量。基于升力系数和阻力系数的拟合多项式以及飞行速度、高度、弹道倾角等状态,通过求解非线性代数方程,即可解得相应的攻角指令。
3 数值仿真与分析
以某飞行器为例,假设其在飞行过程中保持零倾侧,以方程(1)模拟其质心运动。对于制导问题研究,可忽略飞行器姿态运动,以攻角指令代替攻角作为质心运动模型的输入。仿真初始条件按照表1设定。当弹目距离小于100 m时,飞行器转为无控飞行。终端约束要求脱靶量小于1 m,落角误差小于2°。将本文提出的制导律(22)记为PLEG。作为对比,在式(21)的最优制导律上附加由攻角指令约束转化的控制约束,保证攻角指令在给定范围内,将此制导律记为OPTG。针对多组具有不同落角约束和攻角指令约束的任务,对2种制导律进行仿真。考虑到飞行器姿控系统的能力限制,仿真中加入20°/s的攻角指令速率限制。
3.1 控制未受限时的仿真
取期望的落角λD*=-60°,并假设攻角指令幅值不受限制。仿真结果如表2和图2所示。

表1 仿真初始条件

表2 控制未受限仿真结果
(a)飞行轨迹 (b)攻角指令-时间曲线
(c)制导律参数γ与剩余飞行时间
由表2可见,PLEG与OPTG的脱靶量及落角均满足要求,且PLEG的制导精度优于OPTG。由图2(a)可见,2种制导律导引下的轨迹均按期望的角度击中目标,且图2(b)中的攻角指令-时间曲线未受约束。由图2(c)可见,PLEG的参数γ在初始时刻位于1/tg与2/tg中间偏上,飞行过程中γ逐渐向2/tg接近,直至最后阶段γ超过2/tg。故由式(21)与式(22),在飞行过程中PLEG的视线转率反馈项系数和视线角反馈项系数均大于OPTG。因此,PLEG是较OPTG以更大控制作用进行控制,取得了更好的制导效果。
3.2 控制受限时的垂直落角约束攻击仿真
在带垂直落角约束的攻击任务中,取期望的落角λD*=-90°,设攻角指令范围分别为-12°~12°和-9°~9°。仿真结果如表3与图3所示。
表3 垂直落角约束攻击仿真结果
(a)-12°~12°,飞行轨迹 (b)-12°~12°,攻角指令-时间曲线
(c)-9°~9°,飞行轨迹 (d)-9°~9°,攻角指令-时间曲线
由表3可见,在不同攻角指令范围内,2种制导方法的脱靶量和落角均满足指标要求,PLEG的脱靶量与落角偏差均小于OPTG。由图3(a)、(b)可见,PLEG的飞行轨迹较OPTG的飞行轨迹平缓,PLEG的攻角指令较OPTG的变化平缓,有利于姿态控制系统跟踪攻角指令。如图3(c)所示,由于攻角指令受限,OPTG导引下的飞行轨迹未能快速下压,轨迹由目标上空穿过并被“拉回”,导致了较大的落角偏差(约1.06°);而在同样情况下,PLEG由于采用了制导律参数在线整定,其飞行轨迹能够快速下压,落角偏差(约0.16°)小于OPTG。而图3(d)所示的OPTG攻角指令-时间曲线长期处于饱和状态,且飞行末段攻角指令变化较大,因而影响了制导精度;而PLEG的攻角指令-时间曲线则相对平缓,且末端攻角指令幅值较小,易于获得良好的制导精度。
3.3 控制受限时的水平落角约束攻击仿真
在带水平落角约束的攻击任务中,设期望落角λD*=0°,攻角指令范围分别为-12°~12°和-9°~9°时的仿真结果如表4与图4所示。
表4 水平落角约束攻击仿真结果
(a)-12°~12°,飞行轨迹 (b)-12°~12°,攻角指令-时间曲线
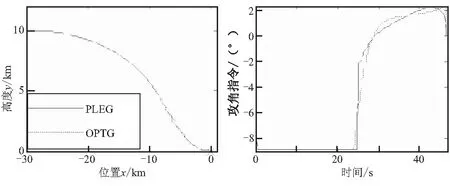
(c)-9°~9°,飞行轨迹 (d)-9°~9°,攻角指令-时间曲线
由表4可见,在不同攻角指令范围内,在2种攻角指令受限的情况下,PLEG的制导精度均优于OPTG的制导精度,脱靶量和落角误差满足指标要求。由图4(a)和图4(c)所示的飞行轨迹可见,对于带水平落角约束的攻击任务,PLEG与OPTG导引下的飞行轨迹均能够击中地面目标。由图4(b)和图4(c)所示的攻角指令-时间曲线可见,PLEG和OPTG的攻角指令-时间曲线变化趋势大体相同,但在飞行末段PLEG的攻角指令趋于零,其终端攻角指令幅值较小,易于获得较高的制导精度;OPTG的攻角指令在飞行末段变化较大,且终端攻角指令幅值大于PLEG,致使OPTG的脱靶量和落角误差均大于PLEG。
4 结论
(1)提出的制导律对多种带落角约束及控制约束的对地攻击任务具有良好的适应性。在所有考察的任务中,飞行过程中的攻角指令以及轨迹终端的落角均满足指标要求,获得了良好的制导精度。
(2)提出的制导律参数在线整定方法能够根据过程约束及剩余飞行时间自动的对制导律参数进行在线调整,保证控制约束及落角约束的满足。同时,避免了针对不同任务重新调整参数、离线凑试参数等问题,使制导律具有良好的工程适用性。
参考文献:
[1] 蔡洪,胡正东,曹渊.具有终端角度约束的导引律综述[J].宇航学报,2010,31(2):315-323.
[2] Kim B S,Lee J G,Han H S.Biased PNG law for impact with angular constraint[J].IEEE Transactions on Aerospace and Electronic Systems,1998,34(1):277-288.
[3] Ratnoo A,Ghose D.Impact angle constrained guidance against nonstationary nonmaneuvering targets[J].Journal of Guidance,Control and Dynamics,2010,33(1):269-275.
[4] Kim M,Grider K V.Terminal guidance for impact attitude angle constrained flight trajectories[J].IEEE Transactions on Aerospace and Electronic Systems,1973,9(6):852-859.
[5] Lee J I,Jeon I S,Tahk M J.Guidance law to control impact time and angle[J].IEEE Transactions on Aerospace and Electronic Systems,2007,43(1):301-310.
[6] 王川,马清华,刘新学.一种再入机动弹头最优制导律研究[J].弹箭与制导学报,2007,26(2):8-11.
[7] 吴鹏,杨明.带终端攻击角度约束的变结构制导律[J].固体火箭技术,2008,31(2):116-120.
[8] 胡正东,曹渊,蔡洪.带落角约束的再入机动弹头的变结构导引律[J].系统工程与电子技术,2009,31(2):393-398.
[9] Harl N,Balakrishnan S N.Impact time and angle guidance with sliding mode control[J].IEEE Transactions on Control Systems Technology,2012,20(6):1436-1449.
[10] 贾庆忠,刘永善,刘藻珍.电视制导侵彻炸弹落角约束变结构反演制导律设计[J].宇航学报,2008,29(1):208-214.
[11] Sun W M,Zheng Z Q.3D variable structure guidance law based on adaptive model-following control with impact angular constraint[C]//Proceedings of the 26th Chinese Control Conference,ZhangJiaJie,China,2007.
[12] 胡正东,郭才发,蔡洪.带落角约束的再入机动弹头的复合导引律[J].国防科技大学学报,2008,30(2):21-26.
[13] 钱杏芳,林瑞雄,赵亚男.导弹飞行力学[M].北京:北京理工大学出版社,2008:36-48.
[14] Zhou B,Duan G R,Lin Z.A parametric lyapunov equation approach to the design of low gain feedback[J].IEEE Transactions on Automatic Control,2008,53(6):1548-1554.
[15] Zhou B,Cui N G,Duan G R.Circular orbital rendezvous with actuator saturation and delay:a parametric Lyapunov equation approach[J].IET Control Theory and Applications,2012,6(9):1281-1287.
