基于遗传算法的VISSIM人车参数标定方法
2014-03-13陈旭梅郭淑霞
李 欣,陈旭梅,万 涛,郭淑霞
(1.北京交通大学交通运输学院,北京 100044;2.北京首都国际机场股份有限公司,北京 100621;3.北京市市政工程设计研究总院交通研究中心,北京 100082)
基于遗传算法的VISSIM人车参数标定方法
李 欣1,陈旭梅1,万 涛2,郭淑霞3
(1.北京交通大学交通运输学院,北京 100044;2.北京首都国际机场股份有限公司,北京 100621;3.北京市市政工程设计研究总院交通研究中心,北京 100082)
微观交通仿真模型在交通系统管理、控制和优化中得到广泛应用,参数标定是应用交通仿真软件前的必要环节,人车交织情况下的微观交通仿真模型标定更具有挑战性。以微观交通仿真软件VISSIM为例,研究人车交织情况下的微观交通仿真模型标定问题,应用遗传算法设计实现了参数标定的方法流程。通过结合实际数据,对北京首都机场T3航站楼出发层车道边人机模型进行标定,有效提高了试验的效率和仿真精度,验证了方法的可操作性。
行人;交通仿真模型;VISSIM;参数标定
交通仿真作为智能交通运输系统的一个重要组成部分,是计算机技术在交通工程领域的一个重要应用。一般来说,交通仿真模型中的参数均有缺省值,但缺省值往往并不一定适合所研究区域的实际交通特征[1]。因此,在运用交通仿真软件进行仿真分析之前,必须对模型中的关键参数进行标定,以符合仿真区域实际的交通状况。如果仿真情境存在复杂的人车交织,此时的标定问题往往需要更加细致的设计,以符合不同交通成分的不同交通特性。本文拟以人车交织的机场出发层车道边为研究对象,因为该区域车辆以及行人运行交织频繁,是开展人车交织研究的典型区域。在细致分析人车交织运行特点的基础上,设计出针对人车复杂交织情况下的仿真模型参数标定方法,对区域内的车辆和行人参数进行标定。
1 人车交织特性分析与参数标定方法设计
1.1 人车交织特性分析
人车交织现象在城市交通中普遍存在,交织区域往往呈现出与基本路段不同的交通特性。人车交织区域常伴随着多条流线的相互交叉,交叉流线上的交通流相互避让导致行人和车辆在该区域内的复杂交通行为。车道边,作为人车交织的典型区域,是指建筑物边缘或内部用于人车转换的区域。机动车在此区域内上、下客,实现建筑物内行人流与外围车流的转换,它由多条机动车道与人行道构成[2-3]。车道边不仅是机场陆侧交通中至关重要的节点,而且是人车接驳的关键场所。此区域人流、车流量均较大,旅客下车后需穿越车流经人行道进入航站楼。正常的交叉口通过信号控制使得人流与车流运行在时间上错开,即使是无信号交叉口或无信号控制的人行横道,车流一般也只与人流产生一次交叉。而在车道边区域路段上,往往要面向航站楼在近距离范围内设置多条人行横道,加之车辆的频繁路边启停现象,产生了各类车流交织以及车流与人流相互交错的复杂现象。经统计,车道边过街行人流量为一般无信号人行横道过街流量的3~5倍。因为车道边的运行特点明显不同于其他路段,所以在对车道边区域进行仿真模拟时,十分有必要重新标定仿真平台内的相关参数,从而使车道边上的车辆和行人行为能够良好地展现其因流线交叉、相互避让产生的复杂交织的行为特点,这对传统的微观交通仿真标定方法提出了新的挑战。
1.2 人机参数标定方法设计
基于以上分析的人车交织特点,提出基于出发层车道边的模型标定工作分为车辆模型和行人模型标定两部分。对于车辆模型参数,利用灵敏度分析方法筛选出车辆关键参数进行标定,而对于行人模型,由于使用仿真软件为VISSIM5.2,该版本有2种方法模拟行人,一种默认的方法是使用一些行人行为的通用规则,另外一种则是将人的行为定义为车辆行为,在车辆模型中设置各种参数来展现行人行为特征。在人车产生大量交织的情境下,第二种方法能够更好地模拟实际的交织特性[4],故选用第二种方法模拟行人交通行为。在分析参数灵敏度的基础上,确定需标定的参数,然后综合考虑车辆和行人参数,设计最优目标,最后开发算法进行求解,得到标定结果。所设计的技术流程如图1所示。
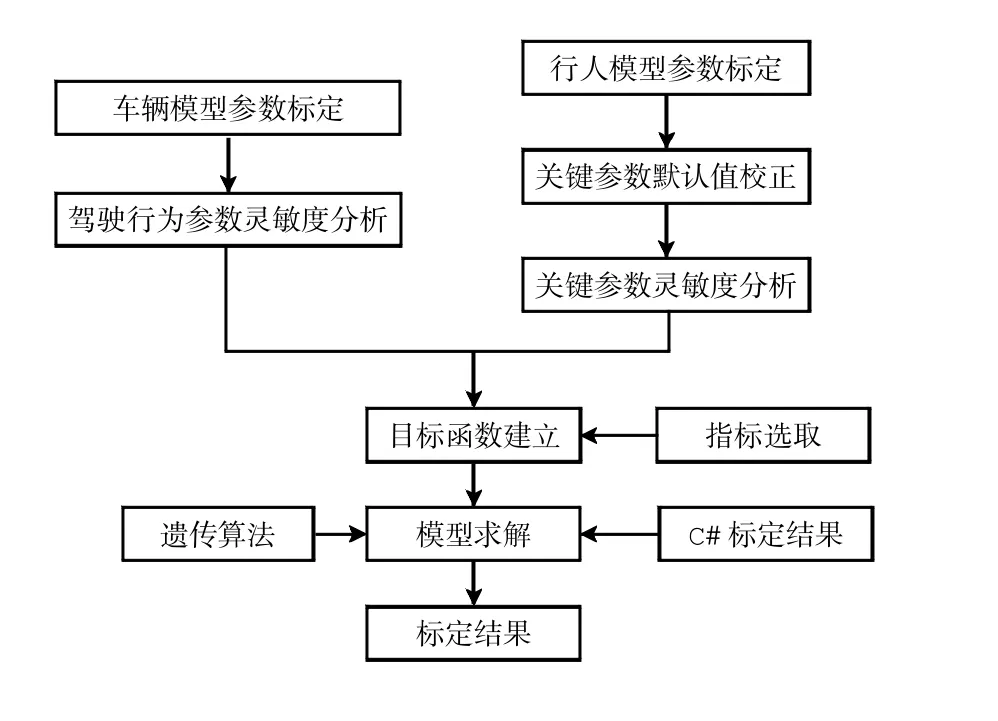
图1 技术流程图Fig.1 Technical Flowchart
微观交通仿真模型的参数标定是一项复杂且系统的工作,特别是对于人车交织仿真环境复杂的网络,需标定的参数多,用人工方法标定参数不仅耗时长,且不易找到最优解[5]。遗传算法是一种将自然遗传学和计算机科学结合起来的现代启发式优化算法,因其强大的问题解决能力和广泛的适应性,近年来逐渐应用于交通工程研究领域,取得了良好的效果[6]。结合标定需要,选取遗传算法作为求解手段,设计基于遗传算法的参数标定步骤为:
1)对遗传算法的运行参数赋值。赋值参数包括:种群规模、变量个数、交叉概率、变异概率和进化次数等,其中对待标定参数的编码方法采用的是二进制编码规则;
2)建立区域扫描器。其中规定各个参数变量变化范围的上限和下限,即设置决策变量的取值范围;
3)随机产生初始种群。通常遗传算法在使用时随机产生初始群体,本文分别取每个参数的最大值与最小值,与其他参数的默认值进行组合作为遗传算法的初始群体;
4)针对种群执行C#应用程序,调用VISSIM,输出运行评价文件,计算目标函数的值。目标函数即对参数组合适应度的评价,反映仿真值与实测值之间的偏差。可根据具体仿真目标设定不同的目标函数来评价参数标定的准确性;
5)对群体中的个体执行选择操作。在产生的N个个体中取适应度最高的保留,其余的N-1个个体通过选择机制有机会进入下一代;
6)按交叉概率执行交叉操作。在选择操作产生的新群体中,除排在第一位的最优个体,其他N-1个个体按交叉概率进行交叉重组,取Pr=0.75;
7)对种群执行变异操作。为保持种群内个体的多样性,变异操作使个体排列顺序发生变化,取Pm= 0.05;
8)判断是否已达到遗传运算的终止进化次数。如果不满足,返回第四步;如果满足,则退出程序,输出结果。
2 所提出参数标定方法应用
2.1 案例区域数据收集
选取首都机场3号航站楼出发层车道边作为研究对象。首都机场3号航站楼位于北京首都国际机场东边,总建筑面积98.6×104m2,于2008年2月投入试运行。根据首都机场建设要求,到2015年,要满足年旅客吞吐量7 600万人次、年货邮吞吐量180×104t、年飞机起降58万架次的要求。可见,T3航站楼承担着重要的货物吞吐与旅客集散任务。首都机场T3航站楼出发层位于T3航站楼地上四层,是离京出发旅客的必经区域,供运送旅客的机场大巴、出租车和所有社会车辆使用。仿真区域如图2实线所示。

图2 仿真区域——首都机场T3航站楼出发层Fig.2 Simulation area-Capital Airport Terminal 3 departure layer
采用视频采集与现场补充调研相结合的方法,获取了路网范围内道路的几何结构、路网各进口路段交通流量、信号灯的信号配时方案、不同类型车辆(大巴、出租车辆及社会车辆)组成比例、航站楼前各种车辆的速度和停车时间分布以及交织人行道上的行人流量、速度等数据,为路网的搭建工作提供支持。
T3航站楼出发层车道功能划分明确,包括内缘道、中缘道和外缘道。其中,内缘道分为4条车道,包括2条停车道、2条行车道;中缘道分为3条车道,包括1条停车道、2条行车道;外缘道分为2条车道,包括1条停车道、1条行车道。与各缘道产生交叉的5个路段为5条人行横道。几何结构示意如图3所示。

图3 车道边分布结构示意图Fig.3 Distribution structure of curbside
根据所收集到的数据和资料,利用微观交通仿真软件VISSIM对目标车道边人车交织路段进行仿真平台搭建,仿真界面如图4所示。
图4 仿真界面Fig.4 Simulation interface
2.2 标定参数选取
VISSIM仿真软件的核心模型是由Wiedemann提出的心理-物理车辆跟驰模型[7]。对车辆及行人进行仿真时,选用Wiedemann 74模型。根据现有经验且结合文献[4],对行人必要参数的默认值和合理范围进行修正,为了保证所选取标定参数的代表性,对车辆及行人所有参数展开敏感性分析。微观交通仿真涉及到大量的参数,若全部进行标定,所需的仿真次数呈几何级数增长,因此十分有必要对参数展开敏感性分析,筛选出对设定路况影响较为明显的参数作为标定对象。
敏感性分析的方法为:以数学指标级差与平均值之间的比例作为度量,所选取的敏感性评价指标为行程时间。即依次输出各参数从最小值到最大值各步长下的行程时间,各步长根据经验值加以设定,计算级差与平均值之间的比例,与各参数默认值下的随不同随机种子数变化的级差与平均值的比值进行比较,高于此标准的即认为该参数敏感。基于以上方法,确定了需标定参数及其取值范围,如表1所示。
2.3 标定结果及分析
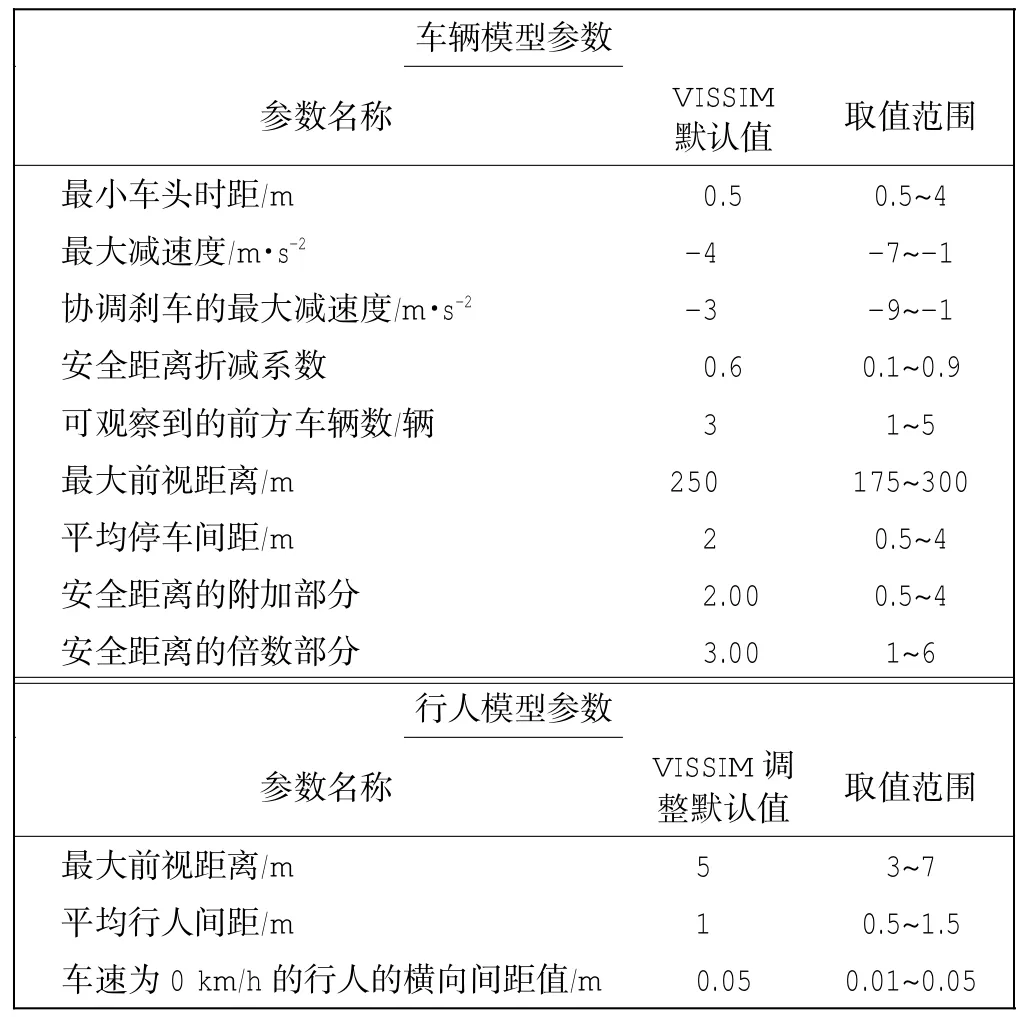
表1 标定参数及取值范围Tab.1 Calibration parameters and range
表1列出了所需标定的12个参数,通过对上述针对人车交织的参数标定方法的应用,以行程时间的匹配为原则,设计目标函数

式中:SSE为标定精度指标;n为行程时间个数;i为车辆及行人行程时间采集编号为实测第i个行程时间为VISSIM输出的第i个行程时间。
运行所开发的自动标定程序,直至达到最大迭代次数(200次),得到航站楼出发层6:00—7:00高峰时段微观仿真参数标定后的结果,如表2所示。

表2 模型参数标定结果Tab.2 Calibration results of model parameters
对比分析实测行程时间、默认参数情况下的行程时间和标定后的行程时间以验证标定的有效性,分析结果如表3所示。
通过以上分析可以看出,标定后的航站楼出发层仿真平台能够有效提高仿真精度,将通过车道边区域的车辆及行人行程时间仿真误差均控制在10%以内,验证了所设计方法的有效性。
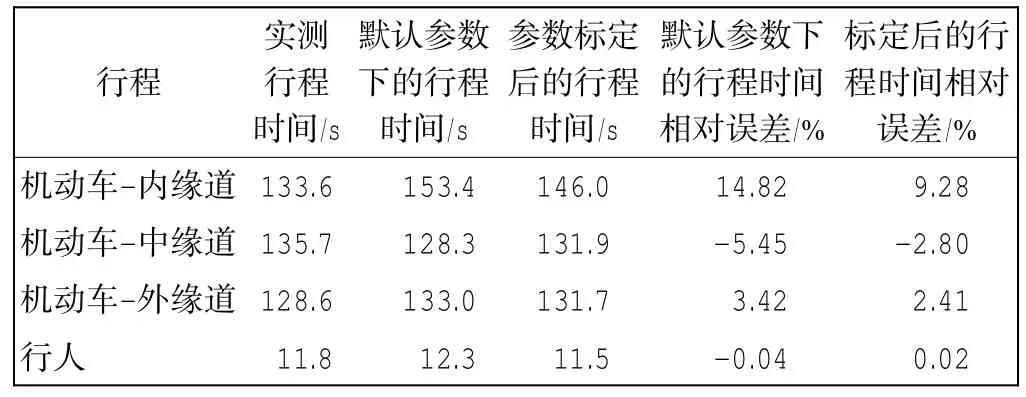
表3 误差分析结果Tab.3 Error analysis
3 结语
研究了针对人车交织的微观仿真模型参数的标定流程,并以北京首都机场出发层车道边为例,根据实际采集的数据,通过运用遗传算法作为求解手段,对VISSIM中的车辆及行人参数进行了标定。结果表明仿真试验达到了优化效果。
利用微观交通仿真手段对道路设施和交通运行进行研究,是目前广泛应用的方法。准确的参数标定能够带来更加可靠的仿真结果。本文针对人车交织特性开发的微观仿真模型参数标定方法,为这一类型的交通标定工作提供了技术基础,同时对不同交通成分的参数标定研究工作具有参考价值。
[1]孙 剑,扬晓光.微观交通仿真模型系统参数校正研究——以VISSIM的应用为例[J].交通与计算机,2004,22(3):3-6.
[2]张兰芳.机场陆侧交通系统若干问题研究[D].上海:同济大学,2007.
[3]高金华,蒋凤伟.枢纽机场航站楼面向旅客的构型优化分析[J].中国民航学院学报,2006,24(5):12-15.
[4]MUHAMMAD MOAZZAM ISHAQUE,ROBERT B.NOLAND.Pedestrian and vehicle flow calibration in multimodal traffic microsimulation [J].Journal of Transportation Engineering,2009,135(6):338-348.
[5]章 玉,于 雷,赵娜乐,等.SPSA算法在微观交通仿真模型VISSIM参数标定中的应用[J].交通运输系统工程与信息,2010,10(4):44-49.
[6]李志明,闫小勇.基于遗传算法的交通仿真模型参数校正方法研究[J].交通标准化,2006(4):21-23.
[7]王爱勤,曾 蔚.两种基于遗传算法的交通量预测方法[J].交通标准化,2004(5):60-62.
(责任编辑:党亚茹)
Calibration of pedestrian and vehicle parameters in VISSIM based on genetic algorithm
LI Xin1,CHEN Xu-mei1,WAN Tao2,GUO Shu-xia3
(1.School of Traffic and Transportation,Beijing Jiaotong University,Beijing 100044,China;2.Beijing Capital International Airport Co.,Ltd.,Beijing 100621,China;3.Department of Transportation Research Center,Beijing Municipal Engineering Design and Research Institute,Beijing 100082,China)
Microscopic simulation models have been widely used in traffic system management,control and optimization. Parameter calibration is necessary before the application of traffic simulation software.Calibration of microscopic traffic simulation models under pedestrian and vehicle interweaving case is even more challenging. Taking the microscopic simulation software VISSIM as an example,the calibration problem is studied when pedestrian and vehicle are interwoven in microscopic traffic simulation models, and a procedure for parameters calibration is proposed by applying genetic algorithm.Using actual data,parameters of vehicles and pedestrians at airport curbside of the T3 terminal at Beijing Capital International Airport are calibrated. The efficiency and accuracy of the simulation test is effectively improved,which verifies that the proposed method is useful.
pedestrian;traffic simulation model;VISSIM;parameter calibration
U491.2
:A
:1674-5590(2014)01-0033-04
2012-12-24;
:2013-03-01
国家重点基础研究发展计划(973计划)(2012CB725403);中央高校基本科研业务费专项(2012JBM054);新世纪优秀人才支持计划资助(NCET-12-0763)
李 欣(1989—),女,北京密云人,硕士,研究方向为交通运输工程.