永磁无刷直流电动机反电势观测器比较与改进
2014-03-12赵宏涛宋庆国
赵宏涛,宋庆国
(空军预警学院,武汉430019)
0 引 言
由方波电流进行供电的永磁无刷直流电动机(BLDCM)具有较高的功率密度和转矩电流比[1],得到了广泛的工业应用。这种电机若需产生恒定转矩,和方波电流对应的应是梯形波反电势[2]。然而,由于电机制造等方面的原因,反电势通常不是理想的梯形波[3]。这种情况下,可实施电流波形控制以匹配反电势,更进一步,还可实施直接转矩控制(DTC)[3-5]。实施DTC 时,因为转矩估算需要用到瞬时反电势值[3,4,6],其正确计算成为控制的关键。文献[3 -4]的DTC 系统采用形状函数法结合位置、速度检测装置计算瞬时反电势值,不仅装置复杂,而且不能反映温度、永磁褪磁等因素对反电势的影响。文献[6]针对文献[5]中提出的DTC 系统,给出了专门的反电势实时计算方法,即滑模状态观测器法,既省去了硬件装置,又能反映反电势随电机状态变化的真实情况,是一种可行的方法。但是,由于电机采用六拍换相的控制方式,观察文文献[6]的反电势计算结果可知,计算值与实际值在换相点处差别较大,这将导致转矩估算不准,影响转矩控制。
为找出误差产生原因,本文将常见的四种状态观测器经适当设计用于反电势计算并将结果进行对比。为消除误差,本文引入比例积分观测器计算反电势,并将其改进以扩展应用范围。为形象说明问题,文中对实际电机的观测结果穿插于论述中。
1 电机模型
由于三相对称,此处的电机模型仅考虑一相,其它相类推。BLDCM 每相的相电压u、相电流i 和相反电势e 的关系可表示[6]:

式中:R 是相电阻,L 是等效相电感(自感减互感)。用x 表示i,可将上述方程写为系统方程形式:

其中e 的位置较特殊,由不同的处理方案决定其地位,y 是系统输出,即容易测得的相电流值。
2 观测器对反电势实施观测
2.1 传统Luenberger 观测器
利用Luenberger 观测器进行观测时,将反电势e扩展为新的状态变量,根据e 在采样时间内几乎为常数的原理[6],由式(2)得下列新的系统方程:

式(3)显然是完全能观的,那么相应的Luenberger状态观测器设计:

2.2 滑模观测器(SMO)[6]
利用SMO 进行观测时,同样是将反电势e 扩展为新的状态变量得到系统方程式(3),所不同的是状态观测器的形式,如下式所示:

式中:K 是反馈增益矩阵,sign(·)是符号函数。
2.3 模型参考自适应(MRAS)观测器
将文献[7]中用于观测永磁同步电动机磁通的MRAS 观测器移植来观测BLDCM 的相反电势,系统方程如式(2)所示,观测器方程如下:


则可以证明献[7],在收敛速率增益F 和自适应增益γ选择适当的条件下,当电流观测值→x 时,反电势估计值→e。
2.4 扩张状态观测器(ESO)
由韩京清提出的扩张状态观测器(ESO)可以观测系统中所有不确定因素的总和,而不需要其任何先验知识[8]。由此,若将反电势e 理解为系统式(2)中的一个不确定因素,则可以通过ESO 得到e^。
定义变量x1,x2:

则式(2)可改造成:
构造式(9)的ESO:
通过适当选择增益β01、β02的数值和误差函数g1(·),g2(·)的形式,可以使观测值z1→x1,z2→x2。这样,反电势e 的估计值可以表示:

2.5 观测结果对比
采用某公司的572w02 型永磁BLDCM 作为被观测对象验证和对比上述观测器。电机相电阻R =0.42 Ω,相等效电感L=1 mH。图1 是实验系统。

图1 永磁无刷直流电机实验系统
如图1 所示,由LabVIEW 检测相电压u、相电流i 送入电脑作为被观测系统的输入输出,由MATLAB 构造各种观测器实时计算相反电势e 的估计值。图2 是相关实验结果。

图2 各种观测器计算反电势结果对比
图2(a)是用原动机拖动实验电机空转所得的反电势波形,波形是光滑的近似正弦波。图2(b)是母线电压约为10 V、斩波频率7 kHz 时得到的相电流波形。由于是六拍换相控制,每周期电流都会有六个阶跃突变点。图2(c)~2(f)分别是用四种观测器计算得到的反电势估计值e^,用相移很小的Butter-worth 滤波器进行了滤波。从观测结果看,虽然经过了滤波,但在电机换相时e^与实际值差别总是较大。四种观测器误差波形有所差别,但误差量都很可观,这将导致后续转矩估算不准。
观察四种观测器的组成结构,可以发现有一个共同点,就是观测器的反馈输入环节只有电流观测误差的比例项。另一方面,根据图2(b),换相时电流观测误差是阶跃量。对比一般控制系统,只有误差比例项的P 控制器的阶跃响应显然精度不高,所以前述四种观测器计算的反电势会有较大误差。
因此,可以在观测器的反馈输入环节增加电流观测误差的积分项,以提高观测精度。文献[9]针对系统存在未知输入干扰时的状态估计问题所提出的比例积分观测器(PIO)正好满足这种需求。
3 比例积分观测器原理与改进
3.1 比例积分观测器原理
从文献[9]的推导可知,PIO 观测器最新颖的性能是在估计系统状态的同时估计未知输入干扰。本文可以利用PIO 将反电势当作未知输入干扰进行估计,同时弥补其他观测器只有电流观测误差的比例项作为反馈的缺陷。
设A= -R/L,B=1/L,D= -1/L,C =1,则系统式(2)可以重新写:

式(12)中,根据电机特性,e 显然可以是有界慢变的(即可作分段常数处理的)未知输入干扰,满足文献[9]要求,于是系统的PIO 设计[9]:

这样,观测器的反馈输入中就包含了电流观测误差的积分项。式中,KP是比例增益,KI是积分增益,f 代表未知输入干扰e 的估计值e^。
因为式(12)的(A,C)对能观,且:

所以依据文献[9]中定理2,式(13)存在且能以任意动态收敛,而其中的f 则收敛于e,图3 给出了PIO 结构框图[9-10],与式(13)对应。图4 是用PIO 计算出的反电势估计值e^(即f ),为了表示相位特性,将图2(b)的电流波形一并绘于图中。观测器增益KP取为5 000,KI取为-5 000。

图3 比例积分观测器结构框图

图4 PIO 反电势估计结果
由图4 可以看出,在未加任何滤波器的情况下,PIO 已经使反电势观测值平滑且接近实际值,克服了电机换相对观测结果的影响,其相位特性也较前四种观测器经滤波后的效果要好。
3.2 比例积分观测器改进
PIO 及前四种观测器所得结果都严重依赖于电机的参数。如果相电阻、相等效电感未准确获取,则观测结果一般不收敛于实际的反电势值。为了使观测器适用于电机参数测量不准确的场合,可以增加其自由度,以便通过调节该自由度来实现准确观测。利用文献[11]的通用结构观测器,即可对PIO 进行改进,增加其自由度。


以任意动态收敛[11],且其中的f 仍然收敛于e。
对于参数精确已知的系统(式(12))来说,令H=0 即可计算反电势估计值e^。当参数有偏差时,可以根据先验知识,例如反电势系数,判断反电势估计是否准确;如不准确,选择适当的H 值,可以一定程度上提高估计精度。例如,当电机的相电阻偏差-20%,变为R' =0.336 Ω,相等效电感偏差20%变为L' =1.2 mH 时,令H= -20,反电势估计结果如图5所示,与图2(a)实测的反电势基本一致。同时,实践表明H 的引入也可以使KP和KI取值更小一些。
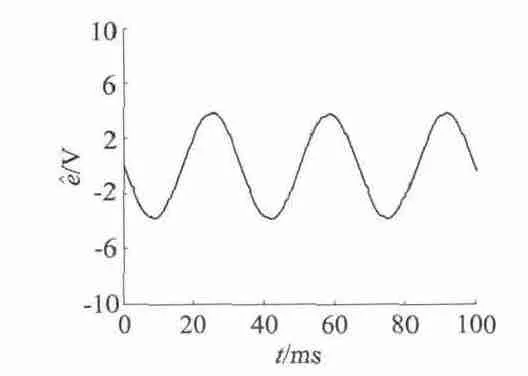
图5 通用结构观测器反电势估计结果
4 结 语
利用状态观测器实施BLDCM 反电势在线观测时,电机的换相会导致较大的观测误差。本文构造了四种状态观测器进行对比以说明观测误差产生的原因,并利用比例积分观测器消除了这种误差。全文结论可归纳如下:
1)从不同的角度看待反电势在系统中所处的位置,可以用不同的观测器对其实施观测(计算)。
2)前四种观测器的反馈输入中只有电流观测误差的比例项,电机换相时反电势估计出现了误差。采用比例积分观测器可消除此误差。
3)引入通用结构观测器对比例积分观测器实施改进,可使其克服一定程度的参数不确定性。
[1] POLLAY P,KRISHNAN R. Application characteristics of permanent magnet synchronous and brushless DC motors for servo drives[C]//IEEE/IAS Annul Meeting.1987:380 -390.
[2] 罗宏浩,吴峻,赵宏涛,等. 永磁无刷直流电机换相控制研究[J].中国电机工程学报,2008,28(24):108 -112.
[3] KANG S J,SUL S K.Direct torque control of brushless DC motor with nonideal trapezoidal back EMF[J]. IEEE Transactions on Power Electronics,1995,10(6):796 -802.
[4] 高瑾,胡育文,黄文新,等.基于反电势形状函数法的无刷直流电动机直接转矩控制[J]. 南京航空航天大学学报,2007,39(4):417 -422.
[5] LIU Y,ZHU Z Q,HOWE D.Direct torque control of brushless DC drives with reduced torque ripple[J].IEEE Transactions on Industry Applications,2005,41(2):599 -608.
[6] LIU Y,ZHU Z Q,HOWE D. Instantaneous torque estimation in sensorless direct - torque - controlled brushless DC motors[J].IEEE Transactions on Industry Applications,2006,42(5):1275 -1283.
[7] CHUNG S K,KIM H S,KIM C G,et al. A new instantaneous torque control of PM synchronous motor for high performance direct drive applications[J]. IEEE Transactions on Power Electronics,1998,13(3):388 -400.
[8] 韩京清.自抗扰控制技术-估计补偿不确定因素的控制技术[M].北京:国防工业出版社,2008:183 -242.
[9] SOFFKER D,YU T J,MULLER P C.State estimation of dynamical systems with nonlinearities by using proportional-integral observer[J].International Journal of Systems Sciences,1995,26(9):157l-l582.
[10] 李振营,沈毅,胡恒章.具有未知输入干扰的观测器设计[J].航空学报,2000,21(5):471 -473.
[11] LEE C H,SHIN M S.Input disturbance estimation using a general structured observer[J]. KSME International Journal,2001,15(12):1609 -1615.
