基于超波束幅度权的盲空间谱减干扰抵消方法
2014-03-01周红进钟云海易成涛李伟
周红进,钟云海,易成涛,李伟
(海军大连舰艇学院 航海系,辽宁 大连116018)
0 引言
拖船自噪声与邻近目标辐射噪声干扰是拖曳线列阵声纳系统进行目标检测时的两种典型近程干扰源[1]。传统的干扰抵消方法是将拖船噪声模型假设为理想点源平面波干扰模型,采用端射波束作为参考输入,从阵元域或者波束域中通过自适应滤波算法抵消相应的干扰分量,比较著名的有Godara 提出的后置波束形成干扰抵消(PIC)算法[2]和丛卫华提出的基元域干扰抵消(EIC)算法[3],PIC 方法已经应用于美国海军AN/SQR-19 战术拖曳线列阵声纳系统中。这两类方法存在两个缺点,首先是忽略了拖船干扰的多途角扩展特性,无法抵消多个相干干扰;其次是PIC 和EIC 算法中的自适应滤波算法均需获取理想的参考干扰信号,否则会导致自适应过程发散,发生信号相抵的现象。基于最优阵处理的自适应波束形成算法有最小方差无失真响应(MVDR)波束形成和主模式抑制(DMR)波束形成方法[4-5]。然而,最佳阵处理算法普遍存在宽容性不好的问题,比如时变的海洋环境、扰动的阵列和小观测快拍数等因素均会造成算法性能严重下降。针对最佳阵处理算法实际应用中的失配问题,Nuttall等提出了一种干扰抵消预处理方案,称为逆波束形成(IBF)[6]。但是,如果要消除拖船多途角扩展干扰需要将IBF 方法进行多次循环抵消,运算量显著增长。到目前为止,在拖曳线列阵干扰抵消领域还没有发现同时针对拖船干扰和邻近目标干扰抵消方法的文章发表。
基于超波束形成(HBF)的幅度权的盲空间谱减干扰抵消方法原理是利用超波束形成技术构造覆盖强干扰方位区域的多波束,获取多波束的幅度谱和每路基元频域信号的幅度谱,对二者归一化,通过合适的“谱减策略”,进行幅度谱相减,从而得到干扰抵消后的基元域信号幅度谱,将差分幅度谱转换为频域信号,然后利用MVDR 完成目标方位估计。计算机仿真与海试数据处理结果表明,本文提出的方法相比传统的MVDR 与PIC 干扰抵消方法在阵增益与弱目标检测能力上有明显提高,能够做到抵消拖船干扰的同时抵消靠近拖曳线列阵的邻近强干扰。
1 基于HBF 的干扰波束幅度权
HBF 的前提是分裂波束处理[7],即将M 元线阵分成两个M/2 阵元的子阵,每个阵分别对目标方位θ 形成常规和波束,记波束输出分别为y1(t),y2(t),做N 点快速傅里叶变换(FFT)后,对应的频域离散信号为Y1(k),Y2(k),则第k 个频点的频域波束输出[7]为

式中:X(k)为经过FFT 后的基元信号;K1=[IM/2|0M/2],K2=[0M/2|IM/2]分别为两个子阵的阵元选择矩阵;a 为多途衰减系数。
根据(1)式中两个子阵波束输出结果,可以得到“和”波束与“差”波束,记为YS(k)和YD(k):

通过“和”波束与“差”波束相减和加权,从而获得超波束输出结果,则其可表示为

式中:n 为超波束性能控制指数,n 的取值范围为0.3≤n≤1.
从(4)式中不难发现,HBF 在波束形成过程中利用绝对值输出进行旁瓣抵消,多波束的输出为不包含相位信息的幅度权UH(k).
2 盲空间谱减干扰抵消
所谓“盲空间谱减干扰抵消”,指的是对于空域中干扰分量与基元域分量之间的联系和统计特性没有先验知识的前提下,通过“合适的谱减策略”完成基元域信号的干扰抵消。
2.1 基元幅度谱和干扰波束幅度谱
记声源信号为sj(n),噪声信号为ni(n),则基阵第i 个通道采样得到的时间序列为

式中:i 为水听器通道索引;j 为目标源的索引;τij为目标辐射声源传播到基阵第i 个阵元的时延;信号采样频率为fN=1/Δ.
由(5)式可知拖曳线列阵声纳的第i 个通道采样得到的时间序列为xi(n),对基元域信号X ={x1(n),x2(n),…,xM(n)}T进行离散短时傅里叶变换(STFT)处理,设定工作频段为(fL,fH),可以得到第j 个频点fj处的基元域频域信号和干扰波束信号:

式中:M 为阵元个数;K 表示总共预成的干扰波束数。需要注意的是,UYH(fj)仅为干扰波束的幅度谱。
求取频点fj处的基元域频域信号的幅度谱与相位谱为

式中:Im (·)和Re (·)分别表示取信号的虚部和实部操作;arctan(·)表示反正切操作,单位rad.
实际应用中,基元域信号与干扰波束的幅度谱往往存在动态范围不一致问题,需要对其进行归一化,则频点fj处归一化后的第m 路基元域信号幅度谱与第k 路干扰波束信号幅度谱为

2.2 合适的谱减策略

通过(12)式可以得到每路基元幅度谱与每路干扰波束幅度谱分量的相关系数。
其次,考察频点fj处第p 个频域快拍的基元域幅度谱分量与干扰波束幅度谱分量的比值αmk(fj,p):

根据(13)式,可以设定阈值来表示两路谱信号是否相关:

式中:η(m)表示判断第m 路基元幅度谱与所有的K 路干扰波束幅度谱是否相关的阈值;max (·)表示取最大值操作;条件中的“0.5”为人工设定的均值比较阈值,可以根据βmk的总体相关程度进行调整。
“合适的谱减策略”为:
1)当βmk≥η(m)时,此时的第m 路基元幅度谱与第k 路干扰波束幅度谱是相关的。如果αmk(fj,p)≥1,表示基元幅度谱分量中干扰分量的强度不大,只需要通过η(m)控制进行谱减;如果αmk(fj,p)<1,表示表示基元幅度谱分量中干扰分量的强度较大,需要通过(fj,p)对(fj,p)进行谱减。
2)当βmk<η(m)时,此时的第m 路基元幅度谱与第k 路干扰波束幅度谱不相关。如果αmk(fj,p)≥1,表示基元幅度谱分量是未知信号,需要保留(fj,p)分量;如果αmk(fj,p)<1,表示基元幅度谱分量是多途引起的其他扩展干扰分量,需要通过αmk(fj,p)和η(m)对(fj,p)分量进行幅度控制。
“合适的谱减策略”公式化后为

根据(15)式形成干扰抵消后的基元域信号幅度谱以后,再由(9)式构成第m 路基元域频域信号:

本文利用MVDR 方法来完成目标方位估计。为表示方便,基于超波束幅度权的盲空间谱减干扰抵消方法,简称为BSSS 方法。
3 数据检验
数据处理分为四个步骤:第一,将接收到的拖曳线列阵信号通过频域宽带处理变为多子带频域信号;第二,利用HBF 技术根据已知的强干扰方位形成覆盖干扰区域的多波束,并且得到干扰波束的幅度权;第三,求取每路基元频域信号的幅度谱与相位谱;第四,利用盲空间谱减方法完成基元域信号的干扰抵消。数据处理流程图如图1所示。

图1 BSSS 方法数据处理流程图Fig.1 Data processing flow chart of BSSS
3.1 海洋仿真环境
为了模拟真实的海洋水声环境,利用基于简正波声传播模型的KRAKEN 工具仿真拖曳线列阵接收数据。海洋背景设定为典型浅海环境,海深75 m,弱负梯度。海底沉积层为沙质淤泥,密度1.787 g/m3,厚度15 m,沉积层上层声速1 572.0 m/s,沉积层下层声速1 593.8 m/s.沉积层下基底为硬底,声速1 881.0 m/s;密度2.060 g/m3;声吸收系数1.7 dB/波长。海况定为2 级。仿真环境声速剖面和声传播深度与距离二维图如图2(a)和图2(b)所示。
拖曳线列阵由40 个水听器构成,拖曳于拖船后1 000 m,相邻水听器间隔0.875 m.拖曳线列阵布放深度为30 m,拖曳速度为8 kn.目标A 方位设定为30°不变,目标B 方位设定为45°不变;目标A 与目标B 之间的信信比为SSRAB=0 dB;目标A 的距离为5.4 n mile,目标B 的距离为2.7 n mile.目标A航速为18 kn,目标B 航速为14 kn.
3.1.1 阵增益分析
阵增益(AG)是常用的评价宽带弱目标检测能力的性能指标:

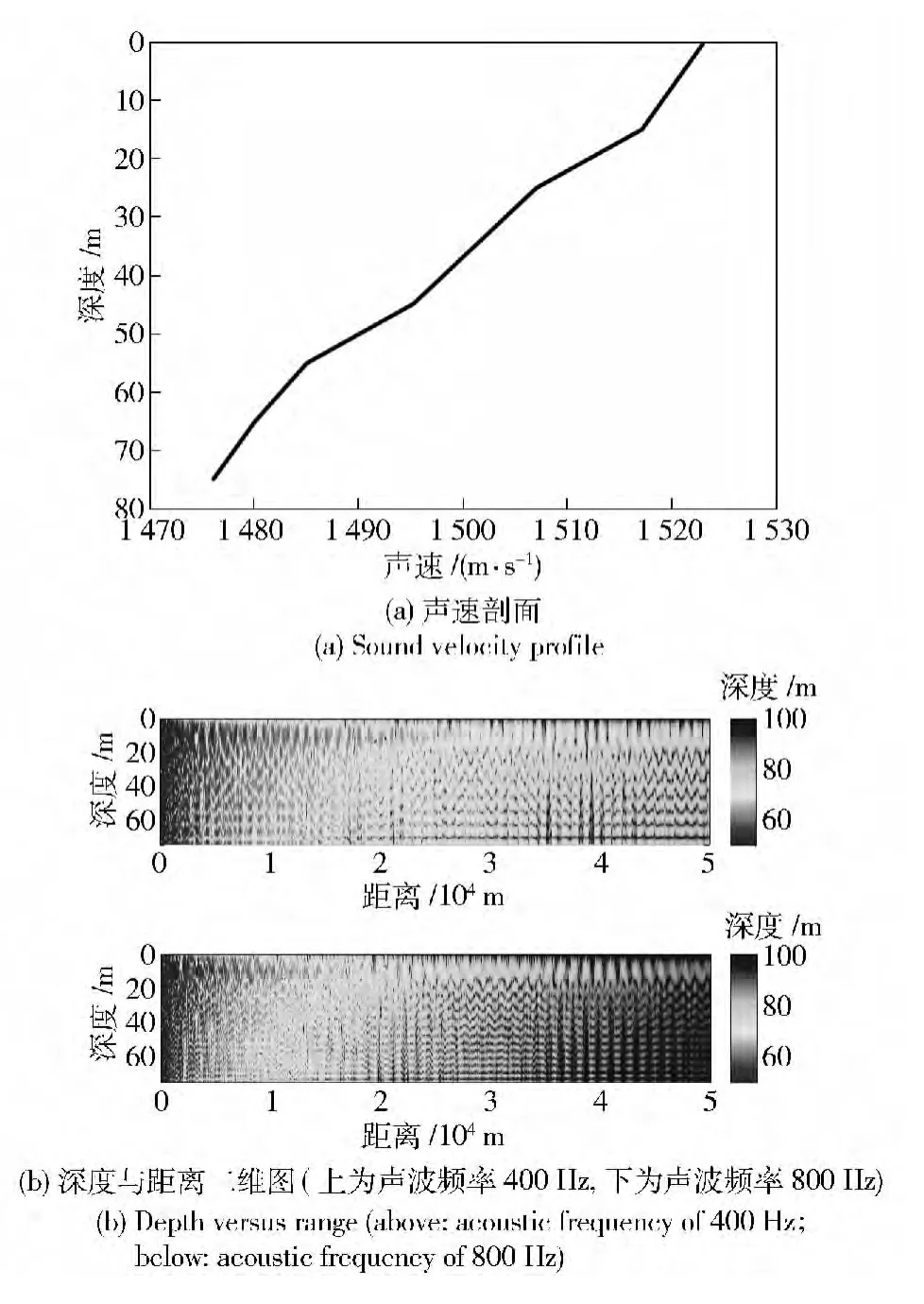
图2 声速剖面和声传播深度与距离二维图Fig.2 Sound profile and propagation depth versus range
式中:P(θ0)和P(θI)分别表示目标到达方位处的波束输出功率和干扰到达方位处的波束输出功率;表示根据目标θ0附近区域的波束输出计算得到的噪声功率;表示根据干扰θI附近区域的波束输出计算得到的噪声功率。
图3分别从信噪比(SNR)、干噪比(INR)和快拍数三个方面与阵增益的关系,比较了MVDR、PIC和BSSS 算法的性能。需要说明的是图3的仿真中只考虑目标A(30°)的阵增益性能,目标B 和目标A的功率。比较图3(a)、图3(b)和图3(c)可看出:1)BSSS 方法在低信噪比下的阵增益要比其他两种方法高约8 dB.MVDR 方法在信噪比低于-20 dB条件下,无法有效检测目标;2)随着干噪比的升高,BSSS 方法具有最高的阵增益,平均比PIC 方法高约10 dB;当干噪比大于15 dB,PIC 方法的阵增益下降最快;3)当快拍数小于100 时,MVDR 和BSSS 方法的阵增益不如PIC 方法;快拍数大于100 时,BSSS方法的阵增益性能略有抬升,与PIC 方法相当。
3.1.2 拖船干扰抑制验证

图3 3 种算法阵增益与信噪比、干噪比和快拍数比较图Fig.3 Comparison of AG versus SNR,AG versus INR,and AG versus snap-shots calculated by three algorithms
图4(a)~图4(c)选用了第35 s(干扰盲区附近)、第50 s(基阵正横)和第158 s 数据(远离基阵)分别比较了3 种方法的拖船干扰抑制性能。从图4中可以看出,BSSS 方法检测到的目标A 和B 具有最高的能量峰值,同时BSSS 方法干扰抑制效果最好。相比MVDR 和PIC 方法,尽管BSSS 检测出了目标A 和目标B,但是在43°和91°分别出现了两个虚警目标,同时检测背景也存在起伏。
图5(a)、图5(b)和图5(c)为3 种方法所处理的方位-历程图。比较3 个子图可以看出,BSSS 方法在3 种方法中将拖船干扰抵消最为理想,同时检测到的目标A 和目标B 的能量幅值也比MVDR 和PIC 方法要高。

图4 3 种算法不同时刻下方位-幅度图比较Fig.4 Comparison of bearing-amplitude calculated by three algorithms
3.1.3 邻近强干扰抑制验证
图6(a)、图6(b)和图6(c)说明了同时存在拖船干扰和近场友邻干扰时,3 种算法的干扰抑制性能。其中,邻近强干扰目标A 方位设定为120°,距离拖曳线列阵2 km 保持不变;目标B 从110°运动到136°,初始距离拖曳线列阵10 km,最终距离为18 km.
图6(a)、图6(b)和图6(c)为BSSS、PIC 和MVDR 3 种方法在第3 s、第40 s 和第60 s 处的宽带警戒方位-幅度全景显示图。从图6的3 个子图可以看出,BSSS 是唯一能同时将拖船干扰和邻近强干扰抵消的方法,PIC 在存在邻近强干扰的条件下,两种干扰的抵消能力都变差了。BSSS 方法的检测背景得到有效抑制。

图5 3 种算法方位-历程图比较Fig.5 Comparison of bearing-time calculated by three algorithms
图7(a)、图7(b)和图7(c)为3 种方法所处理的宽带警戒方位-时间-幅度瀑布二维显示图。比较3 个子图可以看出,BSSS 所检测的目标B 较MVDR 和PIC 方法历程要清晰,对于拖船干扰和邻近强干扰目标B 的抑制能力也要好于其余两种方法。BSSS 方法有效抑制了检测背景。
3.2 海上实测数据
试验海区位于东经121°33' ~121°42',北纬38°46' ~38°52'的主航道附近,海区平均水深46 m,声传播速度约1 500 m/s.海区地形复杂,水流急,过往船只多,离岸近、干扰源多,属典型的复杂海区。接收阵列由28 个水听器等间隔组成,阵元间距0.225 m,接收阵列深度约为20 m.水听器接收信号经信号调理机送达Sony sir1000i 录音机磁带记录,数据记录期间,接收船辅机一直发电,有较大噪声。试验时目标船在大约5.3 km 的距离沿正横经过接收船。目标船运动时,在视觉范围内发现有渔船目标运动,渔船先于目标船经过接收船正横。

图6 3 种算法不同时刻下方位-幅度图比较Fig.6 Comparison of bearing-amplitudes calculated by three algorithms
图8(a)、图8(b)和图8(c)为3 种方法海试数据的三维方位-历程图。由于接收基阵离接收艇辅机较近(悬挂于辅机出水口正下方约20 m 深),因此在-10°~10°方位区域内形成较强的近程干扰。MVDR的干扰抑制能力最弱,PIC 方法在干扰盲区形成了较深的凹槽,通过凹槽的目标也被抑制。相比MVDR 和PIC 方法,BSSS 方法检测具有3 点改进:1)渔船和目标艇目标的方位历程要更清晰(历程“偏瘦”,多途抑制效果要好),尤其是目标艇初始200 s 的历程;2)BSSS 方法在渔船和目标艇通过盲区时依然能够检测到目标,尤其是BSSS 方法在干扰抑制后,对盲区内的目标艇检测增益较高;3)BSSS 方法对于-80° ~-40°内3 个弱目标检测效果要好于MVDR 和PIC 方法。
4 结论

图7 3 种算法方位-历程图比较Fig.7 Comparison of bearing-times calculated by three algorithms
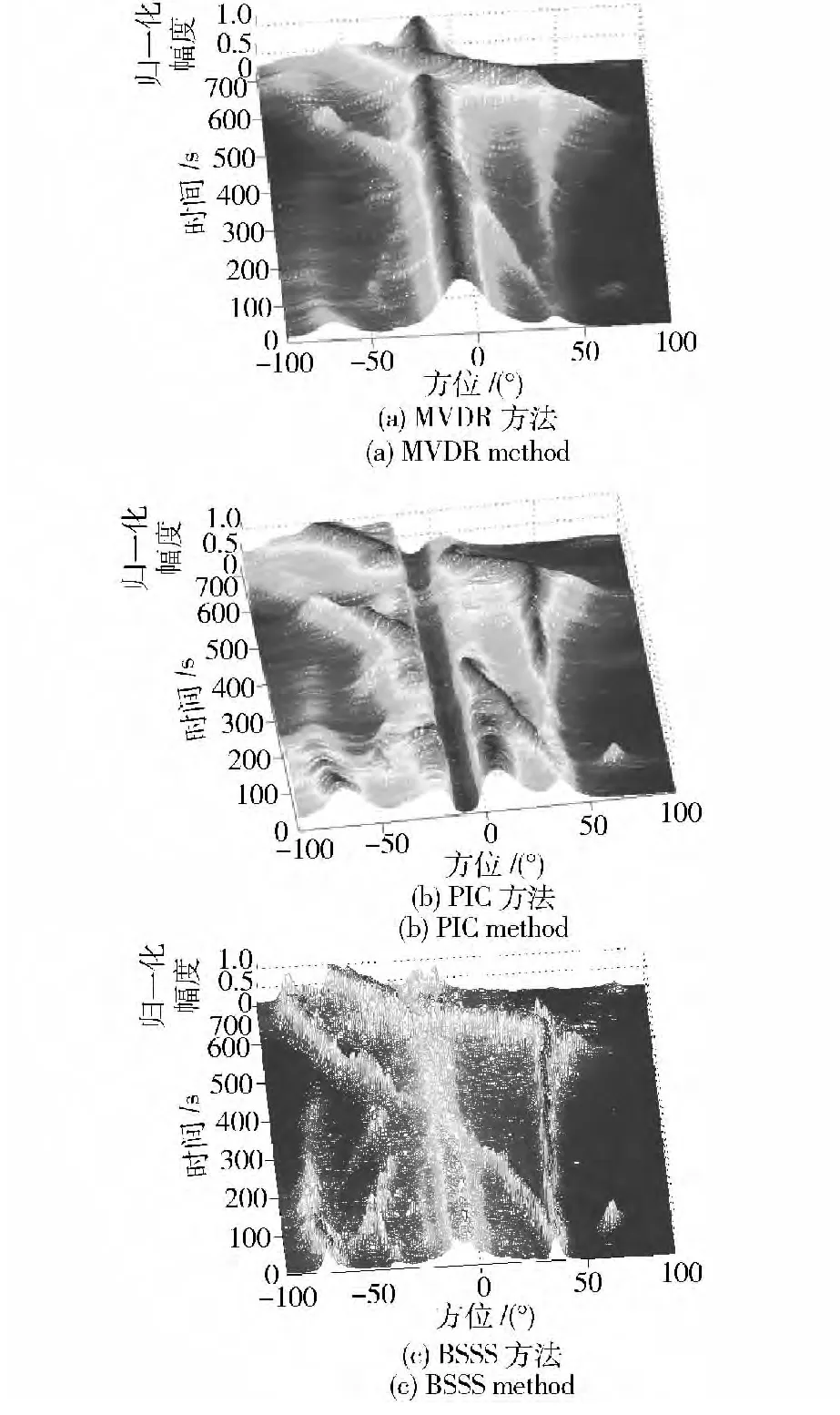
图8 3 种方法海试数据比较Fig.8 Comparison of sea test results of three methods
针对影响拖曳线列阵目标检测的两种典型强干扰(拖船自噪声干扰和近场强干扰),提出了一种基于超波束幅度权的盲空间谱减干扰抵消方法,利用HBF 技术产生超低旁瓣和超窄主瓣的的波束来获取干扰源信息,从而提高获取干扰分量的准确度,同时通过幅度谱谱减的方法在频域内实现了基元域的干扰抵消。仿真数据和海试数据处理结果表明这种方法实现了同时抵消拖船干扰和邻近拖曳线列阵目标的强干扰,相比传统的MVDR 方法和PIC 方法,具有以下优点:
1)BSSS 方法的阵增益在低信噪比和强干噪比条件下要比MVDR 和PIC 方法提高10 dB.
2)BSSS 方法相比MVDR、PIC 方法具有更好的弱目标检测能力。
3)BSSS 能够做到抵消拖船干扰的同时抵消靠近拖曳线列阵的邻近强干扰。
References)
[1] 李启虎,李淑秋,孙长瑜,等.主被动拖线阵声呐中拖曳平台噪声和拖鱼噪声在浅海使用时的干扰特性[J].声学学报,2007,32(1):1 -4.LI Qi-hu,LI Shu-qiu,SUN Chang-yu,et al.towed platform noise and towed fish noise interference characteristics of positive and passive towed array sonar used in shallow sea[J].Acta Acustica,2007,32(1):1 -4.(in Chinese)
[2] Godara L C.Postbeamformer interference canceler with improved performance[J].The Journal of the Acoustical Society of America,1989,85(1):202 -213.
[3] 丛卫华.自适应拖船噪声抵消技术研究[D].哈尔滨:哈尔滨工程大学,1999.CONG Wei-hua.Research on self-adapt noise cancellation of towed ship noise cancel[D].Harbin:Harbin Engineering University,1999.(in Chinese)
[4] 杨德森,陈欢,时胜国.基于最大似然估计的辐射噪声源近场定位方法性能分析[J].振动与冲击,2010,29(12):67-83.YANG De-seng,CHEN Huan,SHI Sheng-guo.Analysis of nearfield position performance with radiated noise based on maximum likelihood estimation[J].Vibration and Shock,2010,29(12):67-83.(in Chinese)
[5] 李秀坤,李婷婷,马涛.微弱信号强干扰分离方法研究[J].振动与冲击,2011,30(3):225 -227.LI Xiu-kun,LI Ting-ting,MA Tao.Research on weak signal separation from strong interference[J].Vibration and Shock,2011,30(3):225 -227.(in Chinese)
[6] Nuttall A H,Wilson J H.Adaptive beamforming at very low frequencies in spatially coherent,cluttered noise environments with low signal-to-noise ratio and finite-averaging times[J].The Journal of the Acoustical Society of America,2000,108(5):2256-2265.
[7] 周胜增,刘东涛,杜选民.超波束处理在被动声纳频谱分析中的应用[J].声学技术,2011,30(5):460 -462.ZHOU Sheng-zeng,LIU Dong-tao,DU Xuan-min.Hyper beam process used in passive sonar frequency spectrum analysis[J].Acoustics Technology,2011,30(5):460 -462.(in Chinese)
