Distributed Consensus of Multiple Nonholonomic Mobile Robots
2014-02-07KecaiCaoBinJiangDongYue
Kecai Cao Bin Jiang Dong Yue
I.INTRODUCTION
Manuscript received June 20,2013;accepted September 2,2013.This work was supported by National Natural Science Foundation of China(61374055,61273171,61304106,61203028),Natural Science Foundation of Jiangsu Province(BK20131364,BK20130381),China Postdoctoral Science Foundation(2013M541663),Foundation for the Doctoral Program of Ministry of Education of China(20113218110011),Jiangsu Planned Projects for Postdoctoral Research Funds(1202015C),Natural Science Foundation of the Jiangsu Higher Education Institutions(11KJB510011,12KJB120005),Qing Lan Project of Jiangsu 2010,Foundation of Nanjing University of Posts and Telecommunications(NY211066),Scientific Research Foundation for the Returned Oversea Chinese Scholars of State Education Ministry(BJ213022).Recommended by Associate Editor Jie Chen
Kecai Cao is with the College of Automation,Nanjing University of Posts and Telecommunications,Nanjing 210023,China,and also with the College of Automation Engineering,Nanjing University of Aeronautics and Astronautics,Nanjing 210003,China(e-mail:caokc@njupt.edu.cn).
Bin Jiang is with the College of Automation Engineering,Nanjing University of Aeronautics and Astronautics,Nanjing 210003,China(e-mail:binjiang@nuaa.edu.cn).
Dong Yueiswith the College of Automation,Nanjing University of Posts and Telecommunications,Nanjing 210023,China(e-mail:medongy@vip.163.com).unmanned aerial vehicles(UAVs),unmanned underwater vehicles(UUVs),unmanned ground vehicles(UGVs),spacecraft formation flight,etc.
Research related to consensus can date back to the work of[1].Recent years have seen a lot of works related to this topic.Consensus protocols for single integrator systems have been given in[2-6]to name a few.While consensus of double integrator systems are considered in[7-9].The consensus problem of linear systems with high order or nonlinear systems is much more challenging compared with that of the integrator systems.For linear time invariant system,a lot of work has adopted the philosophy of “decomposition”to reduce complexity as shown in the following.Cooperative control of multiple linear time-invariant(LTI)vehicles has been realized in[5]using the technique of Schur decomposition.Based on this decomposition,the cooperative control problems of multiple LTI systems have been transformed into control problems of multiple simple subsystems.Then the cooperative control problems of the original system will be solved if each subsystem is stabilized as shown in[10]and[11].Some other results such asH∞andH2stability for multiple continuous LTI systems are also obtained in[12]and[13]using the framework of “decomposition”.
In order to solve the cooperative control problem of multiple nonlinear dynamic systems,nonlinear tools and system structure have been introduced in some recent papers.Tools from dissipative theory have been adopted in[14]to characterize the constraints on communication channels in the distributed control of dynamic system.Other nonlinear tools,such as input to state stability(ISS)in[15]and[16],internal mode control in[17]and passivity in[18]and[19],are also introduced into the cooperative control of multiple nonlinear dynamic systems.Cascaded system theories are used in[20]for the attitude synchronization problem of spacecrafts with disturbance.Similar results also can be found in[21]for synchronization of multiple chaotic systems.
A.Distributed Control of Multiple Nonholonomic Systems
Compared with linear systems or normal nonlinear systems,control of multiple nonholonomic systems is much more difficult.As shown in[22],there are no smooth(or even continuous)time-invariant state feedback controllers to asymptotically stabilize this kind of system.Controllers for linear systems or normal nonlinear systems are not effective any more when applied to nonholonomic systems.
Some previous work on cooperative control of nonholonomic systems have only considered the cooperative control problem under persistent reference signals.The nonholonomic robots are required to keep rotating or oscillating in[23]for the cooperative hunting problem.The direction angles are left to oscillate sinusoidally in[24]for the formation control problem,and the reference target′s velocities are not allowed to converge to zero in[25]and[19]for the cooperative pathfollowing control problem.In circular motion control problem,the assumption of rotating around a virtual beacon is imposed in[26]for nonholonomic robots.Similarly,linear velocity of the leader robot is not allowed to be equal to zero in[27-29]to guarantee controllability of the nonholonomic unicycles.
The stabilization and tracking control problems of single nonholonomic systems have received a lot of attention due to the challenges presented in control of this kind of systems.There are many papers about designing controllers for this kind of systems using time-varying,discontinuous or hybrid feedback controllers.It is worthy of considering whether Brockett′s condition is also effective in the cooperative control of multiple nonholonomic systems.Consensus for networked nonholonomic unicycles has been realized using time invariant continuous feedback controllers in[30]without group reference.Results obtained in[30]have shown that Brockett′s condition is not a barrier in consensus of nonholonomic unicycles.Different from the work of[30]where the consensus value cannot be specified,the consensus problem of networked multiple nonholonomic mobile robots with groups reference trajectory will be considered in this paper.
B.Main Contributions of This Paper
Consensus of multiple nonholonomic mobile robots with group reference has been considered in this paper.Consensus protocols have been constructed no matter the reference signal converges to zero or not,so that consensus on different kinds of reference signals can be realized using controllers of this paper.Cascaded theories of nonautonomous system have been introduced to transform the consensus problem of one complex system into consensus problems of two simple subsystems.Some persistent exciting signals have been injected to realize consensus of all state variables.To our best knowledge,there are few papers considering the consensus problem of multiple nonholonomic systems when the group reference signals converge to zero.
The rest of the paper is organized as follows.System model and problem statements are firstly given in Section II.Some preliminary results are also included in Section II.Challenges in control of nonholonomic systems are discussed in Section III,and one simulation is included to show that previous consensus protocols cannot be directly extended to the consensus problem of nonholonomic mobile robots.Consensus protocols and our main theorems are proposed in Section IV.Simulation results and conclusions are given in Section V and Section VI,respectively.
II.PRELIMINARIES
ForNnonholonomic mobile robots (indexed by 1,2,···,N)that move on a plane,we assume that each of them has the same mechanical structure and can be described by the following equations in the global coordinate frame:
wherei=1,2,···,N.
TheNmobile robots can be represented byNvertices of graphG=(V,E),whereVis the set of vertices,Eis the set of all edges where one edge(j,i)∈Emeans the state of robotjis available to roboti.For the graphGwithNrobots,the adjacency matrixA=A(G)=(aij)can be defined asaij=1 if there is one edge(j,i)∈E,andaij=0,otherwise.LetNibe the collection of neighbours for roboti,and the desired reference trajectory for the group can be described as the following system:
whereud,ωdare known time-varying functions.Our control problem is defined as follows.
Consensus problem.Design a controller for each follower based on its neighbours and its own states such that the group of robots will reach consensus on the desired group reference,i.e.,design control laws for systems(1)such that

wherei,j=1,2,···,N.
Practical consensus problem.Under appropriate controllers and communication topology,all the states of robot system(1)will converge to a domain of the desired value,i.e.,there exists a constantε>0 and appropriate cooperative controllers for system(1)such that

wherei,j=1,2,···,N.
Now,we recall some definitions and lemmas that will be used in the next section.
Definition 1[31].ω dis persistently exciting,i.e.,there exist positive constantsα1,α2andδsuch that the following condition holds for allt>0:

Lemma 1[32].Consider a linear time-varying system in the form of

whereA0is a constant and Hurwitz matrix,A1(t)is timevarying and satisfies

The systems is globally uniformly exponentially stable(GUES).
Lemma 2[31].Consider a linear time-varying system



then system(7)is uniformly completely controllable.

Actually,system(8)can be regarded as

perturbed by the output of the system

Lemma 3[31,33].The cascade time-varying system(8)is globallyK-exponentially stable if the following conditions are satisfied.
1)Subsystem(9)is globally uniformly exponentially stable.

whereθ1:R+→R+,θ2:R+→R+are continuous functions.
3)Subsystem(10)is globallyK-exponentially stable.
III.CHALLENGES IN CONTROL OF NONHOLONOMIC MOBILE ROBOTS
A.Control of Single Nonholonomic Mobile Robot
System(1)can also be rewritten as
It is easy to prove that system(11)is controllable using the Lie algebra rank condition of[34].However,it has been proved in[22]that a necessary condition for smoothly stabilizing a driftless regular system(i.e.,the input vector fields are linearly independent at the desired equilibrium)is that the number of inputs equals the number of states.The well-known result obtained in[22]is that there are no static smooth or even continuous stabilization controllers for the stabilization problems of system(1).
A lot of efforts have been put into the control of this kind of systems.For example,time-varying controllers,discontinuous controllers or even hybrid controllers have been proposed for stabilization problem or tracking control problem in recently published papers.
B.Control of Multiple Nonholonomic Mobile Robots
One interesting question is whether Brockett′s necessary ondition is still a big challenge for the consensus problem of multiple nonholonomic system.Some preliminary work has been given in[30]that consensus of networked nonholonomic mobile robots can be obtained using linear time-invariant continuous state feedback.But it is still unknown what is the relationship between consensus value and initial states,and how to specify and achieve such consensus value is still open.The authors believe that achieving consensus on certain desired consensus value is much preferred in many applications,such as flocking and swarming problem of mobile robots,and rendezvous and docking problem of spacecraft systems.Thus,the consensus problem of networked multiple nonholonomic mobile robots with group reference trajectory will be considered in this paper.
As shown in[35],system(1)can be transformed into the following nominal chained form by input and state transformation:
Similarly,the group reference system(2)can also be transformed into
If we apply the previous consensus protocols for the design ofui1as

whereaij=1 means that the state information of agentjcan be obtained by agenti,andai0=1 means that the state information of the reference agent can be obtained by agenti,otherwise,aij=0 andai0=0 means there is no communication between them.
Under the following cooperative controller
we first consider the consensus problem when the communication topology is undirected and connected under the assumption that the reference input converges to zero,i.e.,u1d=exp(-t).
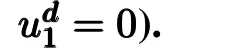
Matlab simulation using the above controllers have been conducted for four nonholonomic mobile robots.Simulation results given in Figs.1 and 2 show that consensus of statexi1andxi2has been obtained using the above consensus protocols while consensus of the third state cannot be reached as shown in Figs.3 and 4.The failure of third state′s consensus can be concluded from uncontrollability of subsystemxi3of(12)whenui1reaches consensus on signal converging to zero.
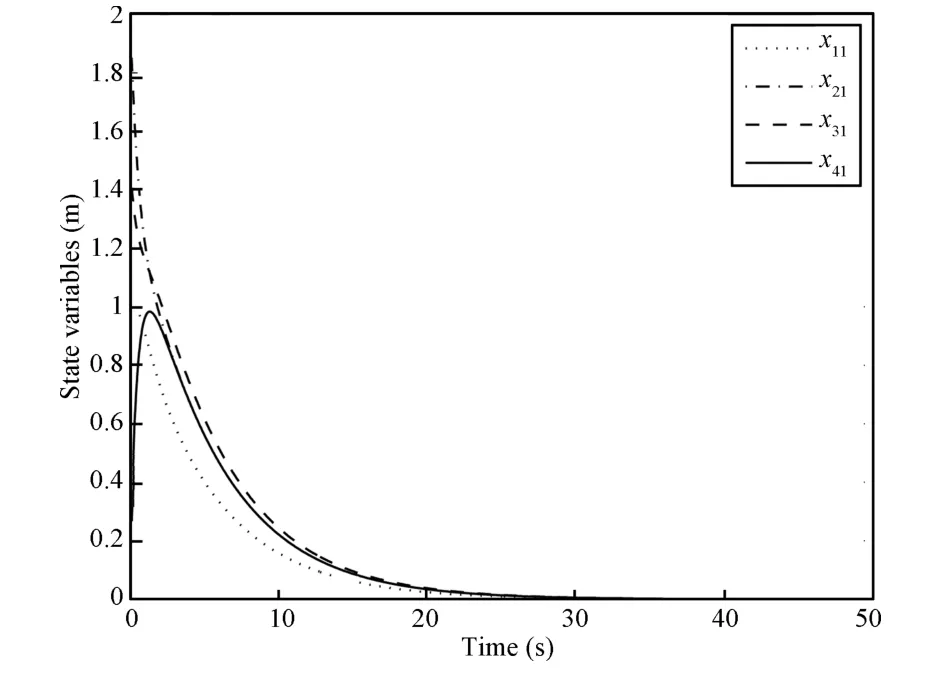
Fig.1. Consensus of xi1(i=1,2,3,4).
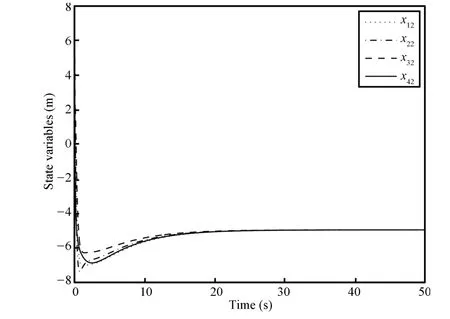
Fig.2. Consensus of xi2(i=1,2,3,4).
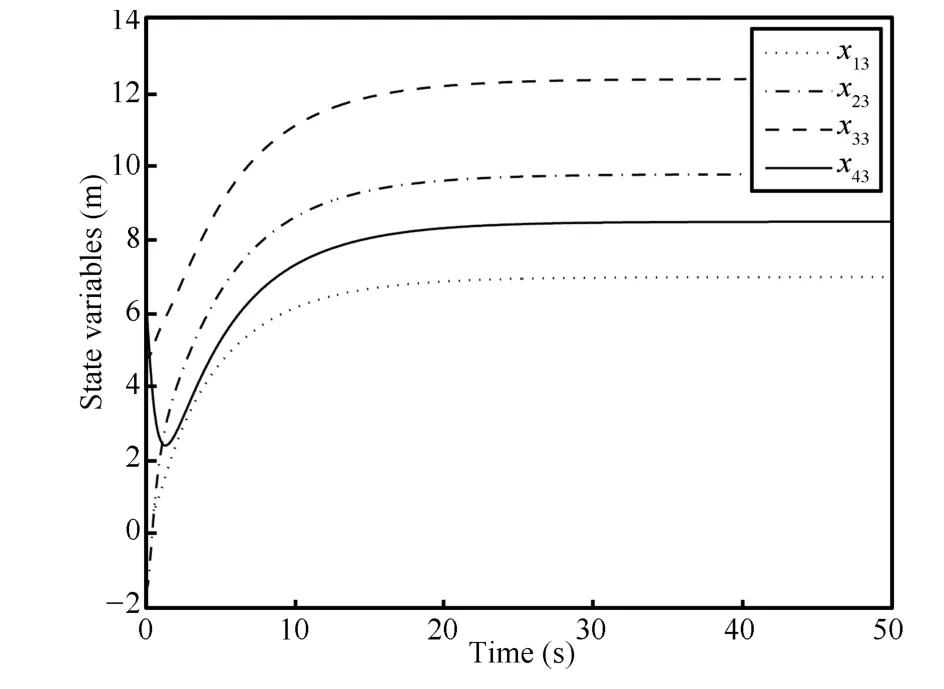
Fig.3. Consensus of xi3(i=1,2,3,4).
From the above simulation results,it is easy to see that only partial consensus(consensus of direction angels and consensus ofxcoordinate)can be obtained in this case.So the previous results on consensus of integrator systems or linear systems cannot be directly extended to the consensus of nonholonomic mobile robots.

Fig.4.Trajectories of each nonholonomic robot.
IV.MAIN RESULTS
Due to the challenges presented in the previous section,different consensus protocols will be considered whenud1is persistent exciting signal and whenud1→0(evenud1=0),respectively.
1)Whenud1is persistent exciting signal
As all the states of(12)are controllable in this case,the consensus problem of(12)is not too difficult.Controller(14)is still adopted to deal with consensus of the first subsystem of(12).
Remark 1.It is easy to see that in this case the consensus protocols for the first subsystem of(12)are not different from that of integrator systems obtained in[2-5].
2)Whenud1→0(or evenud1=0)
Controllerui1are constructed as
Remark 2.Concerning the controller design ofui1in this case,we have the following comments.
1)To our knowledge,this work reports the first consensus results of nonholonomic mobile robots withud1→0(or evenud1=0).
2)The philosophy in the design ofui1in this case is to add some perturbing signals,such as persistent sinusoidal signal inui1,to guarantee controllability of the entire system.
3)The desired error rangeεcan be as small as possible to satisfy some desired requirements in application.
4)The controller design ofui1in this case is discontinuous,and the continuous version ofui1is



is introduced no matterui1converges to persistent exciting signal or zero,wherek2>0 andk3>0 are constants,andL∈Rn×nis Laplacian matrix of undirected connected graph.

B.Main Theorems
Theorem 1.The system

will reach consensus exponentially ifφ(t)is persistently exciting,wherek2>0,k3>0 are constants,andL∈Rn×nis Laplacian matrix of connected graph.
Proof.Consider Laplacian potential function associated with the undirected graphGas

which is positive semi-definite whenGis connected.It is easy to obtain that

which is negative semi-definite.




The consensus problem of system(1)can be solved using controllers(14)and(16),when the communication topology is connected and at least one system accesses the information ofxd1.
Proof.Under controllers(14)and(16),the closed loop system can be written as

If we substituteui1of(19)with(14),then system(19)can be considered as the following system
and the cascaded term is


2)Subsystem(21)will also reach consensus whenud1is persistent exciting signal according to Theorem 1.

Due to Lemma 3 of nonautonomous cascaded system,we can claim that consensus can be reached among theNnonholonomic mobile robots under controllers(14)and(16)when communication topology is connected and at least one of them can access the reference signal. □
The practical consensus problem of system(1)can be solved using controllers(15)and(16)when the communication topology is connected and at least one system can access the information ofxd1.
Proof.1)Whenρi≥ε
In this case,we inject some persistent exciting signals into the controller ofui1to guarantee controllability of theith subsystem such asksin(t)in(15).For each subsystem(22),it can be easily obtained thatui1will reach consensus onksin(t)under connected communication topology.Thenρi<εcan be obtained for subsystem(21)using the cascaded theory of nonautonomous system under controller(16)due to the exponential consensus result proposed in Theorem 1 whenφ(t)=ksin(t).
2)Whenρi<ε
In this case,consensus of system(22)on the original reference signal will be obtained when the communication topology is connected,and at least one of the subsystems can access the reference signal,with eachρibeing allowed to travel freely in theεneighbourhood.
Then the practical consensus problem of multiple nonholonomic mobile robots can be solved using controllers given in(15)and(16)under connected communication topology and at least one system can access the reference signal. □
Remark 4.Based on the results of Theorems 2 and 3,consensus of multiple nonholonomic mobile robots can be solved no matterud1is persistent exciting signal or not.To the authors′knowledge,this is the first result about consensus of nonholonomic system without restriction onud1,unlike those in[27-29]where persistent excitation or nonzero constants have been imposed on cooperative control of this kind of systems.
V.SIMULATION RESULTS


Figs.5~7 have shown consensus of each state variable of four nonholonomic robots with respect to time.Consensus of their first statexi1and second statexi2is obtained as shown in Figs.5 and 6,respectively.Only practical consensus ofxi3is obtained as shown in Fig.7 whereε=0.001.Fig.8 shows the trajectories of each nonholonomic robot on the plane.Simulation results have shown effectiveness of the consensus protocols presented in Theorem 3.

Fig.5. Consensus of xi1(i=1,2,3,4).
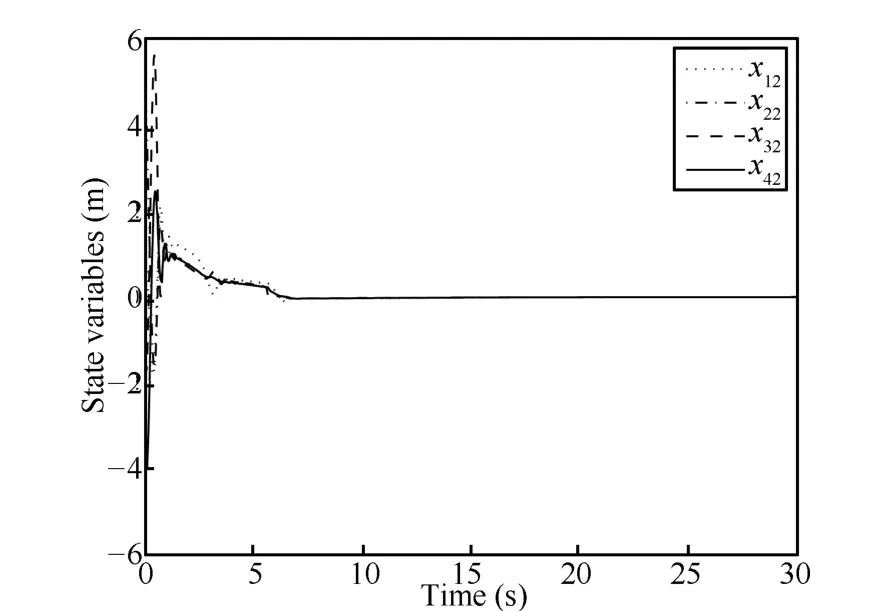
Fig.6. Consensus of xi2(i=1,2,3,4).
Fig.7.Consensus of xi3(i=1,2,3,4).


Fig.8.Trajectories of each nonholonomic robot.

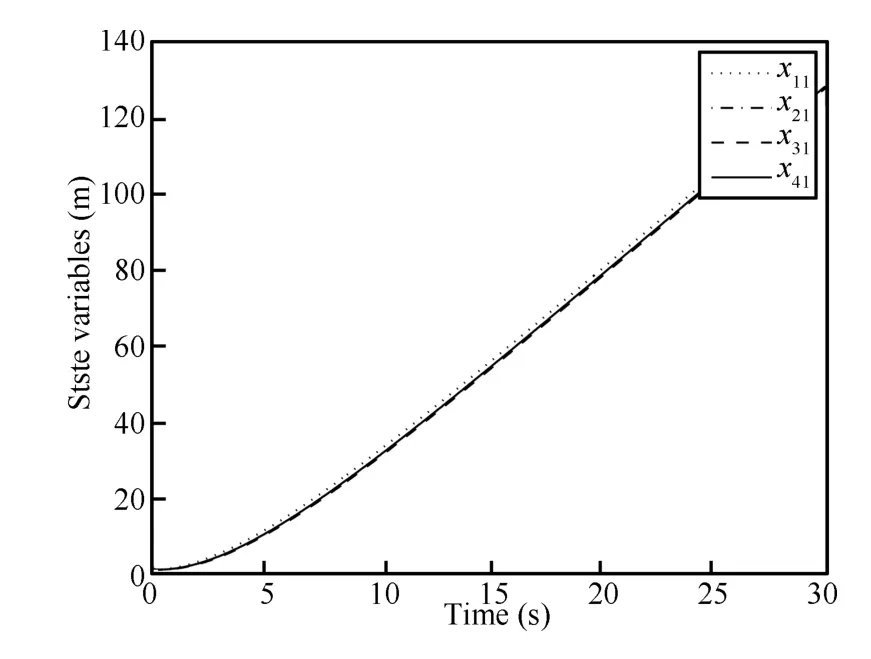
Fig.9. Consensus of xi1(i=1,2,3,4).

Fig.10. Consensus of xi2(i=1,2,3,4).


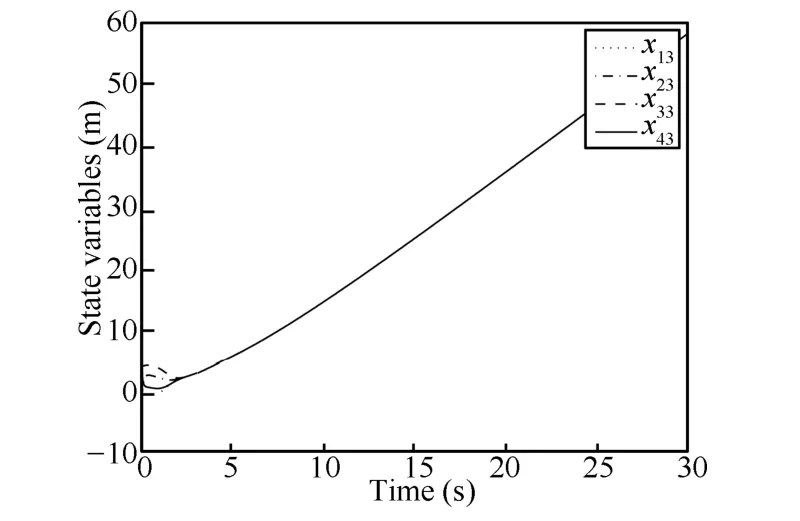
Fig.11. Consensus of xi3(i=1,2,3,4).
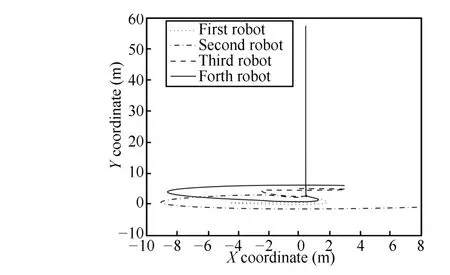
Fig.12. Trajectories of all nonholonomic robots.
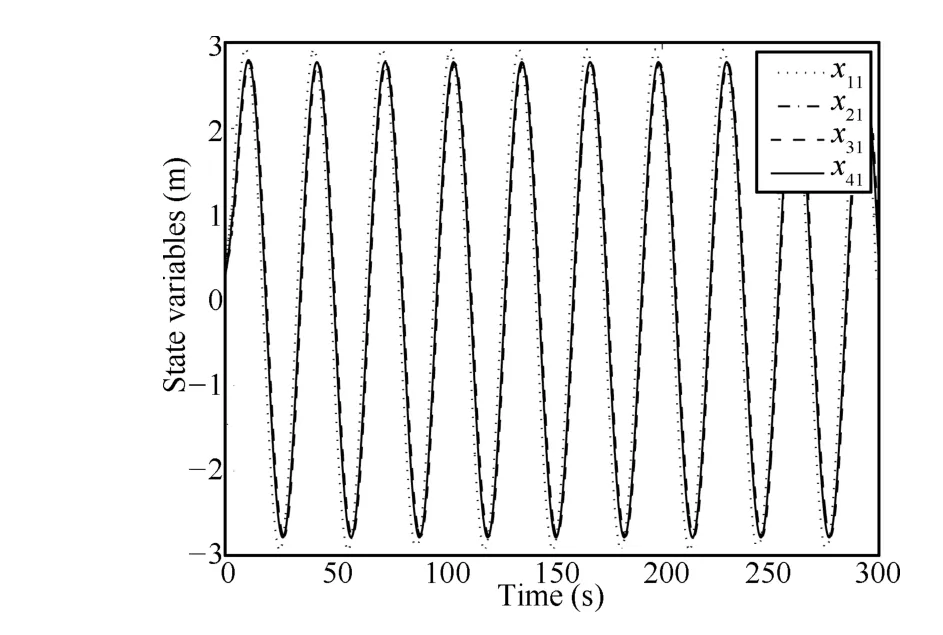
Fig.13. Consensus of xi1(i=1,2,3,4).

Fig.14. Consensus of xi2(i=1,2,3,4).
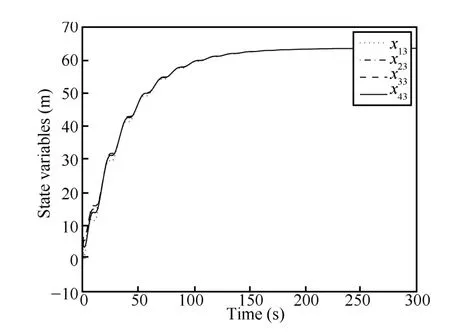
Fig.15. Consensus of xi3(i=1,2,3,4).

Fig.16.Trajectories of all nonholonomic robots.
VI.CONCLUSION
Consensus problems of nonholonomic mobile robots both with and without persistent exciting signals have been considered in this paper.The cascaded theory of nonautonomous system is introduced to transform the consensus problem of nonholonomic mobile robots into consensus problems of two subsystems.Perturbation signals are injected into one of the subsystem to guarantee controllability of the nonholonomic mobile robots,when the group reference signal does not satisfy the condition of persistent excitation.Hybrid controllers are obtained in the end,and practical consensus is realized using the proposed controllers for this case.To the authors′knowledge,this work reports the first consensus result for multiple nonholonomic mobile robots when the group reference does not satisfy the condition of persistent excitation.The framework is extended to the consensus problem of nonholonomic chained form systems ofndimensions in another paper.Fault detection and fault tolerant problem in the cooperative control of nonholonomic systems are also interesting problems for the authors to consider in future.
[1]DeGroot T,Morris H.Reaching a consensus.Journal of the American Statistical Association,1974,69(345):118-121
[2]Jadbabaie A,Lin J,Morse A S.Coordination of groups of mobile autonomous agents using nearest neighbor rules.IEEE Transactions on Automatic Control,2003,48(6):988-1001
[3]Ren W,Moore K,Chen Y Q.High-order and model reference consensus algorithms in cooperative control of multi vehicle systems.Journal of Dynamic Systems,Measurement,and Control,2007,129(5):678-688
[4]Olfati-Saber R,Fax J A,Murray R M.Consensus and cooperation in networked multi-agent systems.Proceedings of the IEEE,2007,95(1):215-233
[5]Fax J A,Murray R M.Information flow and cooperative control of vehicle formations.IEEE Transactions on Automatic Control,2004,49(9):1465-1476
[6]Ren W.Multi-vehicle consensus with a time-varying reference state.Systems&Control Letters,2007,56(7-8):474-483
[7]Ren W,Atkins E.Distributed multi-vehicle coordinated control via local information exchange.International Journal of Robust and Nonlinear Control,2007,17(10-11):1002-1033
[8]Ren W.On consensus algorithms for double-integrator dynamics.IEEE Transactions on Automatic Control,2008,53(6):1503-1509
[9]Xie G M,Wang L.Consensus control for a class of networks of dynamic agents.International Journal of Robust and Nonlinear Control,2007,17(10-11):941-959
[10]Massioni P,Verhaegen M.Distributed control for identical dynamically coupled systems a decomposition approach.IEEE Transactions on Automatic Control,2009,54(1):124-135
[11]Popov A,Werner H.Robust stability of a multi-agent system under arbitrary and time-varying communication topologies and communication delays.IEEE Transactions on Automatic Control,2012,57(9):2343-2347
[12]Ghadami R.Distributed Control of Multi-agent Systems with Switching Topology,Delay,and Link Failure[Ph.D.dissertation],Northeastern University,United States,2012
[13]Ghadami R,Shafai B.Decomposition-based distributed control for continuous-time multi-agent systems.IEEE Transactions on Automatic Control,2013,58(1):258-264
[14]Langbort C,Chandra R S,D′Andrea R.Distributed control design for systems interconnected over an arbitrary graph.IEEE Transactions on Automatic Control,2004,49(9):1502-1519
[15]Liu T F,Hill D J,Jiang Z P.Lyapunov formulation of ISS cyclic-small-gain in continuous-time dynamical networks.Automatica,2011,47(9):2088-2093
[16]Wang X,Liu T,Qin J.Second-order consensus with unknown dynamics via cyclic-small-gain method.IET Control Theory and Applications,2012,6(18):2748-2756
[17]Liao F,Lum K Y,Wang J L,Benosman M.Adaptive control allocation for non-linear systems with internal dynamics.IET Control Theory and Applications,2009,4(6):909-922
[18]Arcak M.Passivity as a design tool for group coordination.IEEE Transactions on Automatic Control,2007,52(8):1380-1390
[19]Ihle I A F,Arcak M,Fossen T I.Passivity-based designs for synchronized path-following.Automatica,2007,43(9):1508-1518
[20]Schlanbusch R,Loria A,Nicklasson P J.Cascade-based controlled attitude synchronization and tracking of spacecraft in leader-follower formation.International Journal of Aerospace Engineering,2011,Article ID151262,DOI:10.1155/2011/151262
[21]Lor´ıa A.Cascades-based synchronization of hyperchaotic systems:application to chen systems.Chaos,Solitons&Fractals,2011,44(9):702-709
[22]Brockett R W.Asymptotic stability and feedback stabilization.Differential Geometric Control Theory.Boston:Birkhauser,1983.181-191
[23]Yamaguchi H,Arai T,Beni G.A distributed control scheme for multiple robotic vehicles to make group formations.Robotics and Autonomous Systems,2001,36(4):125-147
[24]Lin Z Y,Francis B,Maggiore M.Necessary and sufficient graphical conditions for formation control of unicycles.IEEE Transactions on Automatic Control,2005,50(1):121-127
[25]Ghabcheloo R.Coordinated Path Following of Multiple Autonomous Vehicles[Ph.D.dissertation],Technical University of Lisbon,Portugal,2007
[26]Ceccarelli N,Di Marco M,Garulli A,Giannitrapani A.Collective circular motion of multi-vehicle systems.Automatica,2008,44(12):3025-3035
[27]Liu T F,Jiang Z P.Distributed formation control of nonholonomic mobile robots without global position measurements.Automatica,2013,49(2):592-600
[28]Dong W J,Farrell J A.Cooperative control of multiple nonholonomic mobile agents.IEEE Transactions On Automatic Control,2008,53(6):1434-1448
[29]Lee D J.Passive decomposition and control of nonholonomic mechanical systems.IEEE Transactions on Robotics,2010,26(6):978-992
[30]Zhai G S,Takeda J,Imae J,Kobayashi T.Towards consensus in networked non-holonomic systems.IET Control Theory and Applications,2010,4(10):2212-2218
[31]Lefeber E.Tracking Control of Nonlinear Mechanical Systems.[Ph.D.dissertation],Universiteit Twente,The Netherlands,2000
[32]Slotine J J,Li W P.Applied Nonlinear Control.Englewood Cliffs,NJ:Prentice-Hall,1991.115
[33]Panteley E,Loria A.On global uniform asymptotic stability of nonlinear time-varying systems in cascade.Systems&Control Letters,1998,33(2):131-138
[34]Isidori A.Nonlinear Control Systems.London:Springer,1995.427
[35]Murray R M.Recent research in cooperative control of multivehicle systems.Journal of Dynamic Systems,Measurement,and Control,2007,129(5):571-583
[36]Cao K C,Jiang B,Chen Y Q.Cooperative control design for nonholonomic chained-form systems.International Journal of Systems Science,DOI:10.1080/00207721.2013.809615
杂志排行

IEEE/CAA Journal of Automatica Sinica的其它文章
- Modeling and Hybrid Optimization of Batching Planning System for steel making-continuous Casting Process
- Timesharing-tracking Framework for Decentralized Reinforcement Learning in Fully Cooperative Multi-agent System
- Containment Control of General Linear Multi-agent Systems with Multiple Dynamic Leaders:a Fast Sliding Mode Based Approach
- Bilateral Teleoperation of Multiple Agents with Formation Control
- Distributed Sparse Signal Estimation in Sensor Networks UsingH∞HH-Consensus Filtering
- Adaptive Nonsingular Terminal Sliding Mode Control Design for Near Space Hypersonic Vehicles