Adaptive Nonsingular Terminal Sliding Mode Control Design for Near Space Hypersonic Vehicles
2014-02-07RuiminZhangLuDongChangyinSun
Ruimin Zhang Lu Dong Changyin Sun
I.INTRODUCTION
NEAR space is the region of earth′s atmosphere that lies between 20km and 100km above sea level.NSHV is a vehicle which operates in near space.Compared with ordinary airplanes,it is characterized by large flight envelope,high altitude,fast velocity,complicated flight environment,strong external disturbances,etc.Therefore,control design for NSHV faces significant difficulties such as strong nonlinearity,highly time-varying dynamics,and large parameter uncertainties[1,2].Various control approaches have been presented to tackle these problems,such as linear parameter varying control[3-5],dynamic inversion[6],backstepping control[7-9],predictive control[10-12],sliding mode control(SMC)[13-15]and fuzzy control[15,16].
Among these control approaches,sliding mode control is a well-known and powerful control scheme which has many attractive characteristics such as good transient,fast response and insensitivity to parameter uncertainties and external disturbances.Therefore,SMC has been successfully applied to
Ruimin Zhang is with the School of Automation,Southeast University,Nanjing 210096,China,and also with the School of Mathematics&Statistics,Henan University of Science&Technology,Luoyang 471003,China(e-mail:zhangrim@163.com).
Lu Dong and Changyin Sun are with the School of Automation,Southeast University,Nanjing 210096,China(e-mail:donglu329@163.com;cysun@seu.edu.cn).flight control systems.In[17],SMC was used in ascent and reentry attitude control design for X-33 in the presence of external disturbances.Durmaz et al.[18]proposed a sliding mode controller with an adaptive sliding surface for NSHV under external disturbances.In[14],an adaptive sliding mode controller combined with feedback linearization was designed for the longitudinal dynamics of a generic hypersonic vehicle.In these papers,the sliding mode controllers were designed based on linear sliding surfaces,and thus the system state only could reach the equilibrium point asymptotically.To overcome this drawback,terminal sliding mode control(TSMC)with nonlinear sliding surface was proposed based on the concept of terminal attractor[19].Compared with conventional SMC with linear sliding surface,TSMC has some improved characteristics such as faster convergence in finite time and higher control precision.Nevertheless,the originally proposed TSMC method has two disadvantages.The first is singularity problem,which may cause infinitely large control values,and the second is chattering phenomenon,which is caused by high-frequency control switching.To address the first issue,some nonsingular TSMC(NTSMC)approaches have been proposed[20-22].NTSMC technique was employed to design attitude controller for aerospace vehicle,and tracking performance was improved in[23].For the second problem,various methods have been proposed to reduce or eliminate the chattering,such as the boundary layer method[24],high order sliding mode[25].Yu et al.[26]proposed a continuous NTSMC approach for rigid robotic manipulators based on a novel continuous reaching law,so that the finite-time reachability to a boundary layer was guaranteed under external disturbances.In[27-29],NTSMC was combined with the second order sliding mode to design flight control systems for hypersonic vehicles,and thus,the designed control systems made the system track desired commands in less time and eliminate chattering phenomena.An alternative simple way to solve the chattering problem is to replace the discontinuous term with an estimate of the uncertainties in an adaptive manner.Based on the effective online estimation of uncertainties and using the dynamic behaviour of a sliding variable,a chattering-free SMC was constructed[30].
Motivated by the above discussion,in this study,an adaptive nonsingular terminal sliding mode control approach is developed for the attitude control of NSHV under parameter uncertainties and external disturbances.Meanwhile,the proposed approach can effectively solve the chattering phenomena.
Firstly,a novel nonsingular terminal sliding surface is proposed,and its finite-time convergence to zero is analytically proved.Then,an adaptive law for nonsingular terminal sliding mode control is derived based on an online uncertainty estimation.Thereinto,the adaption law of uncertainty estimation is derived based on the Lyapunov technique.Thus the priori knowledge of the upper bound of lumped uncertainty is not required,and the controller design is greatly simplified.Finally,the proposed approach is used to design attitude control system for NSHV,and simulation results are presented to verify efficiency and robustness of the proposed approach.
The major contributions of this paper are stated as follows:1)Proposing a novel nonsingular terminal sliding surface,which not only can provide a finite-time convergence,but also makes the tracking error in the sliding mode converge to the origin within a maximum settling time;2)Developing an adaptive estimation approach for the lumped uncertainty under the fast-varying condition,and eliminating the requirement for the upper bound of the lumped uncertainty;3)Developing a continuous control law that eliminates the chattering phenomena.
The rest of this paper is organized as follows.In Section II,the problem statement and preliminaries are formulated.In Section III,we propose an adaptive nonsingular terminal sliding mode control approach.The proposed approach is applied to designing the attitude control system for NSHV in Section IV.Section V presents simulation to validate the proposed approach.Finally,some conclusions are made in Section VI.
II.PROBLEM FORMULATION AND PRELIMINARIES
A.Problem Formulation
A nonlinear system under model uncertainties and external disturbances is described as



Assumption 2.The lumped uncertaintyψ=Δf+Δg uuu+dddand its derivative are bounded as

whereD1andD2are unknown positive constants.
B.Preliminaries
Some notations and lemmas which will be useful later are introduced in this subsection.

Lemma 1[31].Consider a nonlinear system


1)Vis positive definite.
2)There exist real numbersc>0,a∈(0,1)and an open neighbourhood ʊ⊆Dof the origin such that

Lemma 2[22].Supposea1,a2,···,an∈Rand 0<q<2,then the following inequality holds:

III.ADAPTIVE NONSINGULAR TERMINAL SLIDING MODE CONTROL DESIGN
In this section,an adaptive scheme for nonsingular terminal sliding mode control is proposed with an adaptive uncertainty estimator for the uncertain system(1).The proposed control scheme can make the resulting closed-loop system stable.
Firstly,a novel nonsingular terminal sliding surface is designed as





Proof.The Lyapunov function is defined as follows:

DifferentiatingVwith respect to time and using(8),one can obtain
According to Lemma 2,we can obtain

Remark 1.The novel nonsingular terminal sliding surface(6)is different from some existing terminal sliding surfaces that are expressed as


Remark 2.A nonsingular terminal sliding surface has been proposed in[22]as

wherec>0 and 0<a<1 are constants.The proposed nonsingular terminal sliding surface(6)can guarantee a high convergence rate even if the tracking error is far away from the equilibrium point.It can be regarded as an extension of the sliding surface(14).

Consider the following differential equation

The settling time of(16)is determined by


Inequality(15)implies that the tracking error can reach the rigin in a desired time by choosing the appropriate parametersγ,k1andk2.
After the appropriate sliding surface has been chosen,the next step is to design a sliding mode control law such that the closed-loop system is stable.
Differentiatingssswith respect to time and utilizing(1),one can obtain

To implement NTSMC controller,a fast terminal-sliding-mode type reaching law is selected as[26]

where design matricesl1,l2∈Rn×nare constant,diagonal and positive definite,and 0<η<1 is a constant.
By combining(19)with(20),the control law can be designed as


s).Thus,an adaptive nonsingular terminal sliding mode control law(ANTSMC)is proposed as


where Λ =diag{λ1,···,λn}is a positive definite diagonal constant matrix that determines the learning rate.
Next,the closed-loop stability with the proposed control law is analyzed based on the Lyapunov method.
Theorem 2.Consider the nonlinear system(1),if the nonsingular terminal sliding surface and the control law are chosen as(6)and(22),respectively,and the adaptive law is designed as(23),then the stability of the closed-loop system in the presence of parameter uncertainties and external disturbances is guaranteed.
Proof.Substituting the control law(22)into(19)will yield

Consider the following Lyapunov function candidate

Taking the time derivative of(25)and using(24),one can get




Thus,the stability with fast convergence of the closed-loop system is obtained.

Thus,it can be concluded that the system can approach to any arbitrary neighbourhood of the sliding surface by selecting the appropriate controller parametersl1,l2. □
Remark 4.The control law(22)is continuous,and therefore eliminates the chattering phenomena.It does not include any negative fractional power,hence is singularity-free.
From(19)and(22),the following closed-loop dynamics can be obtained

which shows the relation between uncertainty and sliding mode variable.
The approach described above will be used to design an attitude control system for NSHV in the next section.
IV.CONTROL DESIGN OFNSHV
The considered attitude control model of NSHV is derived from the twelve-state kinematic equations with six degrees of freedom[33,34],which can be simplified as the affine nonlinear equation as follows:

Here,Ω =[α,β,µ]Tis state vector of the slow loop,i.e.,attitude angle vector of NSHV,including angle of attack,angle of sideslip and angle of bank.ω=[p,q,r]Tis fastloop state vector which is angular rate vector.MMMc=gfδδ=[lctrl,mctrl,nctrl]Tis control torque vector.δ=[δe,δa,δr]Tis aerodynamic control surface deflection whereδe,δaandδrdenote left elevator,right elevator and rudder,respectively.gfδ∈R3×3is control allocation matrix.gs,gf∈R3×3are invertible matrices,andfs,ff∈R3are nonlinear vector functions.The concrete expressions of the above matrixes are speci fied in[33,34].Δfs,Δff,Δgsand Δgfare model uncertainties induced by system parameter uncertainties.ddd(t)is external disturbances.

The control aim is to design the slow-loop and fast-loop controllers such that attitude angle stateΩcan track the commandΩcstably and robustly.
Firstly,the slow-loop control design of NSHV is given.To design the slow-loop controller,the nonsingular terminal sliding surface is chosen as(6),that is,
Using the proposed control approach,the slow-loop controller is designed as

Under the controller(36),a continuous control lawω cis produced,and serves as the command signal in the fast loop.
Secondly,the controller design of the fast loop is similar to that of the slow loop,which is given as

V.SIMULATION RESULTS

The parameters of controllers(36)and(37)are set as

Some other methods are used to design the same control system for NSHV in order to compare with our method.Conventional terminal sliding mode control(CTSMC)with the terminal sliding surface,the same as(14),is employed as the controller:

where tanh(·)is a hyperbolic tangent function,used to replace the sign function to avoid chattering.The parameters in CTSMC(38)are selected to becs=cf=2I,as=af=0.8,andks=kf=25I.
Conventional sliding mode control(CSMC)with a linear sliding surface Σ =e(t)+λRt0e(τ)dτis adopted as the controller:

The parameters in CSMC(39)are chosen to beλs=λf=2I,ls=lf=25I.
Moreover,a backstepping control with nonlinear disturbance observer[8](Backstepping+NDO)is employed for attitude control,in which the parameters are set asK1=K2=25I,Kd=10I.
The experimental results of four control systems mentioned above are shown in Figs.1 and 2.
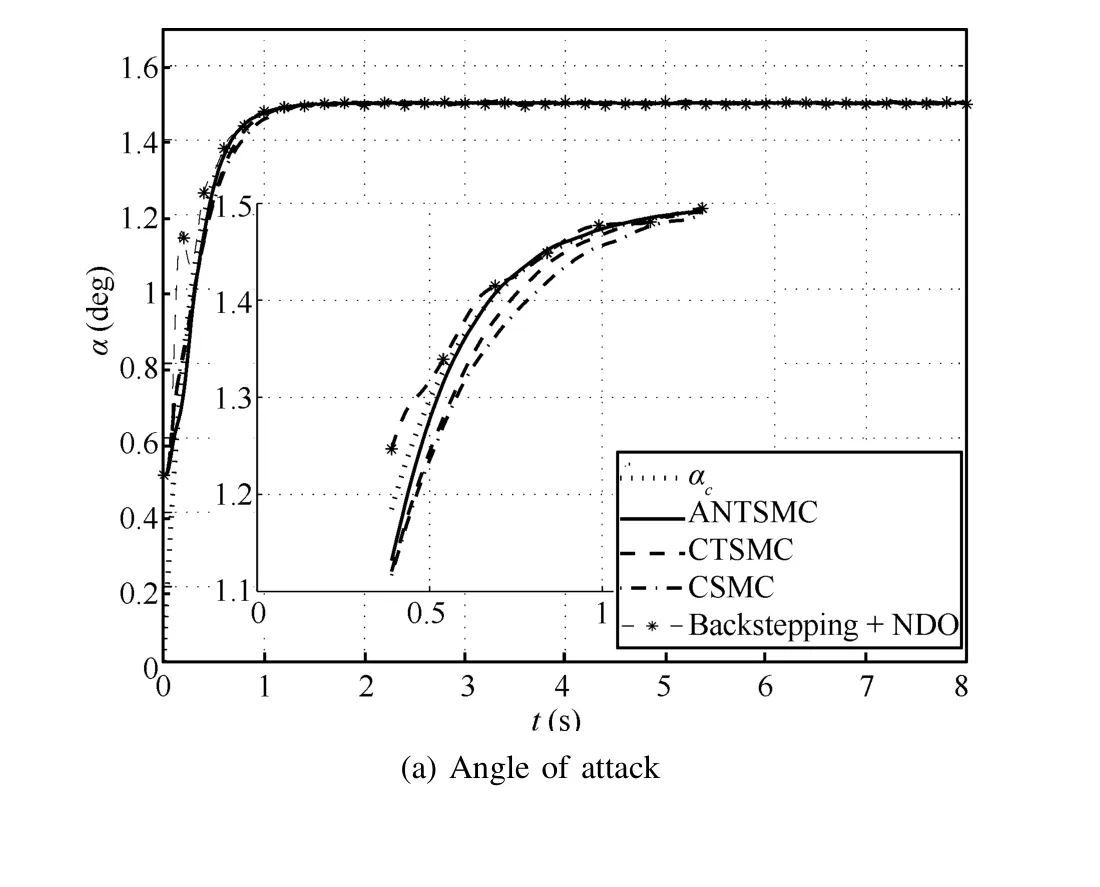

Fig.1.Comparison of attitude control performance.
From Fig.1,it can be seen that the tracking performance using ANTSMC is much improved,compared with the other control systems in the presence of parameter uncertainties and external disturbances.ANTSMC attains a higher tracking precision and better dynamic performance than the others.From Fig.2,it can be inferred that the proposed approach overcomes chattering phenomena.
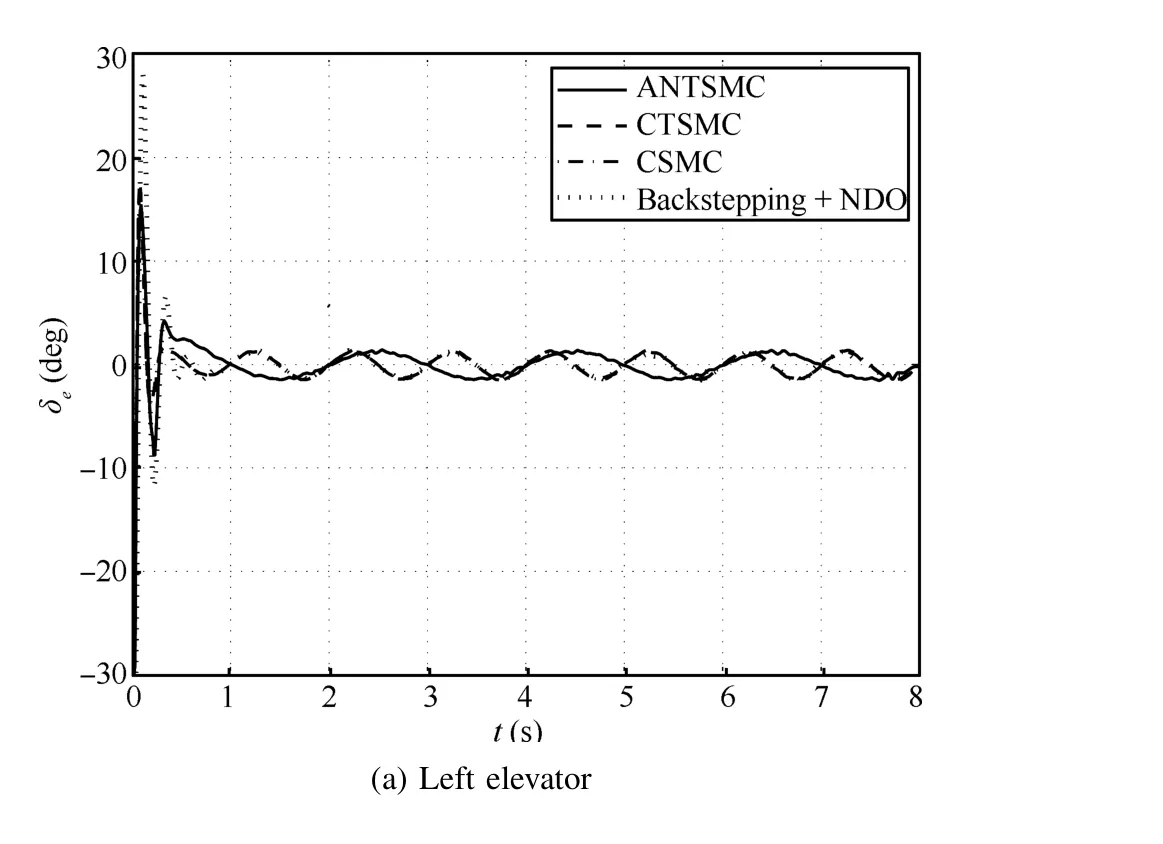

Fig.2.Comparison of control surface deflections.
VI.CONCLUSION
In this paper,we have described the design of an adaptive nonsingular terminal sliding mode controller for NSHV.Firstly,a novel nonsingular terminal sliding surface is introduced,and its finite-time convergence is proved.Then,an adaptive nonsingular terminal sliding mode controller is presented based on an uncertainty estimator.The proposed approach relaxes the requirement for the bound of the lumped uncertainty in control design and eliminates chattering phenomenon.The stability of the closed-loop system is analyzed.Finally,simulation results show better performance of the presented approach for NSHV attitude control.Moreover,the robustness to parameter uncertainties and external disturbances rejection is successfully accomplished.
[1]Chen Zong-Ji,Zhang Ru-Lin,Zhang Ping,Zhou Rui.Flight control:challenges and opportunities.Acta Automatica Sinica,2013,39(6):703-710(in Chinese)
[2]Bao Wei-Min.Present situation and development tendency of aerospace control techniques.Acta Automatica Sinica,2013,39(6):697-702(in Chinese)
[3]Huang Y Q,Sun C Y,Qian C S,Wang L.Slow-fast loop gain-scheduled switching attitude tracking control for a near-space hypersonic vehicle.Proceedings of the Institution of Mechanical Engineers.Part I:Journal of Systems and Control Engineering,2013,227(1):96-109
[4]Huang Y Q,Sun C Y,Qian C S,Wang L.Polytopic LPV modeling and gain-scheduled switching control for a flexible air-breathing hypersonic vehicle.Journal of Systems Engineering and Electronics,2013,24(1):118-127
[5]Huang Y Q,Sun C Y,Qian C S,Wang L.Non-fragile switching tracking control for a flexible air-breathing hypersonic vehicle based on polytopic LPV Model.Chinese Journal of Aeronautics,2013,26(4):948-959
[6]da Costa R R,Chu Q P,Mulder J A.Reentry flight controller design using nonlinear dynamic inversion.Journal of Spacecraft and Rockets,2003,40(1):64-71
[7]Li Jing-Jing,Ren Zhang,Qu Xin.Design of active disturbance rejection backstepping attitude controller for maneuvering glide vehicles.Journal of Systems Engineering and Electronics,2010,32(8):1711-1715(in Chinese)
[8]Chen M,Jiang B.Robust attitude control of near space vehicles with time-varying disturbances.International Journal of Control,Automation and Systems,2013,11(1):182-187
[9]Zhang J M,Sun C Y,Huang Y Q.DSC-backstepping based robust adaptive LS-SVM control for near-space vehicle′s reentry attitude.International Journal of Intelligent Computing and Cybernetics,2012,5(3):381-400
[10]van Soest W R,Chu Q P,Mulder J A.Combined feedback linearization and constrained model predictive control for entry flight.Journal of Guidance,Control,and Dynamics,2006,29(2):427-434
[11]Du Y L,Wu Q X,Jiang C S,Xue Y L.Adaptive recurrent functional link network control for hypersonic vehicle with atmospheric disturbances.Science China Information Sciences,2011,54(3):482-497
[12]Wang P,Tang G J,Liu L H,Wu J.Nonlinear hierarchy-structured predictive control design for a generic hypersonic vehicle.Science China Technological Sciences,2013,56(8):2025-2036
[13]Ning Guo-Dong,Zhang Shu-Guang,Fang Zhen-Ping.Entry control using sliding modes and state observer synthesis for reusable launch vehicle.Journal of Astronautics,2007,28(1):69-76(in Chinese)
[14]Xu H J,Mirmirani M,Ioannou P A.Adaptive sliding mode control design for a hypersonic flight vehicle.Journal of Guidance,Control,and Dynamics,2004,27(5):829-838
[15]Li Jing-Jing,Ren Zhang,Song Jian-Shuang.Fuzzy sliding mode control for hypersonic reentry vehicles.Journal of Shanghai Jiaotong University,2011,45(2):295-300(in Chinese)
[16]Wu S F,Engelen C J,Babuska R,Chu Q P,Mulder J A.Fuzzy logic based full envelope autonomous flight control for an atmospheric reentry spacecraft.Control Engineering Practice,2003,11(1):11-25
[17]Shtessel Y,Mcduffle J.Sliding mode control of the X-33 vehicle in launch and re-entry modes.In:Proceedings of the 1998 AIAA Guidance,Navigation,and Control Conference.Reston,VA:AIAA,1998.1352-1362
[18]Durmaz B,Ozgoren M K,Salamci M U.Sliding mode control for nonlinear systems with adaptive sliding surface.Transactions of the Institute of Measurement and Control,2012,34(1):56-90
[19]Yu X H,Man Z H.On finite time mechanism:terminal sliding modes.In:Proceedings of IEEE International Workshop on Variable Structure Systems.Tokyo,Japan:IEEE,1996.164-167
[20]Feng Y,Yu X H,Man Z H.Nonsingular terminal sliding mode control of rigid manipulators.Automatica,2002,38(12):2159-2167
[21]Feng Y,Bao S,Yu X H.Inverse dynamics nonsingular terminal sliding mode control of two-link flexible manipulators.International Journal of Robotics and Automation,2004,19(3):91-102
[22]Aghababa M P,Khanmohammadi S,Alizadeh G.Finite time synchronization of two different chaotic systems with unknown parameters via sliding mode technique.Applied Mathematical Modelling,2011,35(6):3080-3091
[23]Huang Guo-Yong,Jiang Chang-Sheng,Wang Yu-Hui.Robust terminal sliding mode control for ASV reentry mode.Systems Engineering and Electronics,2008,30(2):304-307(in Chinese)
[24]Slotine J,Li W.Applied Nonlinear Control.New Jersey:Prentice Hall,1991.290-292
[25]Levant A.Sliding order and sliding accuracy in sliding mode control.International Journal of Control,1993,58(6):1247-1263
[26]Yu S H,Yu X H,Shirinzadeh B,Man Z H.Continuous finite-time control for robotic manipulators with terminal sliding mode.Automatica,2005,41(11):1957-1964
[27]Zhang R M,Sun C Y,Zhang J M,Zhou Y J.Second order terminal sliding mode control for hypersonic vehicle in cruising flight with sliding mode disturbance observer.Journal of Control Theory and Applications,2013,11(2):299-305
[28]Zhang R M,Wang L,Zhou Y J.On-line RNN compensated second order nonsingular terminal sliding mode control for hypersonic vehicle.International Journal of Intelligent Computing and Cybernetics,2012,5(2):186-205
[29]Pu Ming,Wu Qing-Xian,Jiang Chang-Sheng,Cheng Lu.Adaptive second order dynamic sliding mode control based on fuzzy disturbance observer.Journal of Control Theory and Applications,2011,28(6):805-812(in Chinese)
[30]Zeinali M,Notash L.Adaptive sliding mode control with uncertainty estimator for robot manipulators.Journal of Mechanism and Machine Theory,2010,45(1):80-90
[31]Bhat S P,Bernstein D S.Finite-time stability of continuous autonomous systems.SIAM Journal on Control and Optimization,2000,38(3):751-766
[32]Parsegov S,Polyakov A.Nonlinear fixed-time control protocol for uniform allocation of agents on a segment.In:Proceedings of the 51st IEEE Annual Conference on Decision and Control.Maui,HI:IEEE,2012.7732-7737
[33]Keshmiri S,Mirmirani M D.Six-DOF modeling and simulation of a generic hypersonic vehicle for conceptual design studies.In:Proceedings of the 2004 AIAA Modeling and Simulation Technologies Conference.Providence,Rhode Island:AIAA,2004.2004-4805
[34]Gao Z F,Jiang B,Qi R Y,Yu Y.Robust reliable control for a near space vehicle with parametric uncertainties and actuator faults.International Journal of System Science,2011,42(12):2113-2124
杂志排行

IEEE/CAA Journal of Automatica Sinica的其它文章
- Modeling and Hybrid Optimization of Batching Planning System for steel making-continuous Casting Process
- Timesharing-tracking Framework for Decentralized Reinforcement Learning in Fully Cooperative Multi-agent System
- Containment Control of General Linear Multi-agent Systems with Multiple Dynamic Leaders:a Fast Sliding Mode Based Approach
- Bilateral Teleoperation of Multiple Agents with Formation Control
- Distributed Sparse Signal Estimation in Sensor Networks UsingH∞HH-Consensus Filtering
- Distributed Consensus of Multiple Nonholonomic Mobile Robots