气囊抛光工艺中接触面积的计算与仿真分析*
2014-01-22詹建明曾云川
赵 钰,詹建明,曾云川
(宁波大学机械工程与力学学院,浙江宁波315211)
0 引言
气囊袋体材料一般采用高弹性的尼龙或橡胶等材料,在其内部充入低压气体后,整体会与工件曲面保持良好的面接触。另外,气囊体的弹性系数基本不受变形量的影响,气囊与工件曲面之间的接触,不会出现应力集中现象,有利于减少研抛划痕。与传统的抛光工具相比,气囊可以更灵活地拟合曲面工件的形状[1-3]。根据现在已有的大多数的研究结果可知,当气囊压在曲面上时,在接触区的每一个点的接触应力大小是相同的。因此,充满压缩气体的柔软气囊是目前为止最好的一种曲面抛光工具之一[4-6]。
气囊抛光加工时,研抛工具能够良好地适应工件曲面形貌的变化、并与工件保持面接触,具有比单点接触抛光加工更高的加工效率。气囊抛光具有加工区域可控且稳定、待磨工件和气囊吻合度高、加工后纹理细腻等优点。待磨工件通过气囊抛光能获得超光滑、超精密光学表面。上世纪90年代,伦敦大学最先发表了关于气囊抛光的相关文献,从理论和实验两方面进行了叙述说明[7],为气囊抛光打下了坚实的基础。从原理上看,该方法特别适用于抛光非球面和自由曲面的光学零件,属于一种既实用又经济的确定量抛光技术,很有希望成为未来光学加工的主要方法之一[8]。但是,由于气囊抛光研究刚起步,对其抛光过程和机理的分析不够透彻,还未能在实际生产得到大范围普及。
使用软质研抛头抛光曲面时,研抛头为了适应曲面表面而使得自身形状发生改变,其接触边界复杂多变。且接触区域的边界确定对抛光的轨迹规划、最终的抛光效果等都有着的直接的影响[9-12]。目前都使用有限元软件来对接触边界仿真,但是有限元仿真过程复杂繁琐。
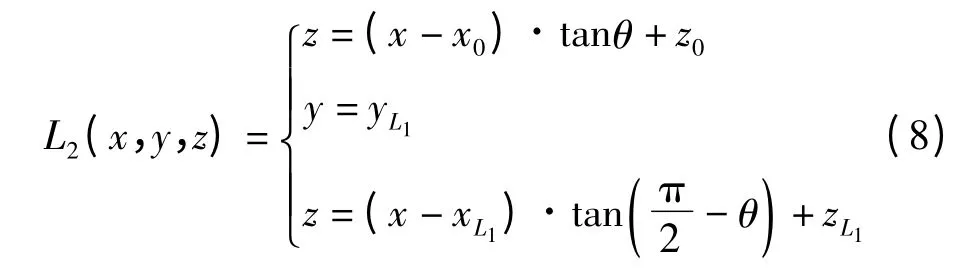
本研究提出一种非球面表面接触面积的几何算法来求解真正的接触边界,通过有限元软件仿真分析来验证几何算法的合理性,该方法对简化接触面积的求解问题有着重要的意义。
1 接触边界和接触面积的几何算法
1.1 基本假设与坐标系的建立
研抛过程中,研抛头选为球形气囊,非球面工件选为椭球面,(X,Y,Z)是数控机床上的以工件椭球面中心O 为原点的整体坐标系,在xoz 平面内,气囊抛光工件的几何模型简图如图1所示。
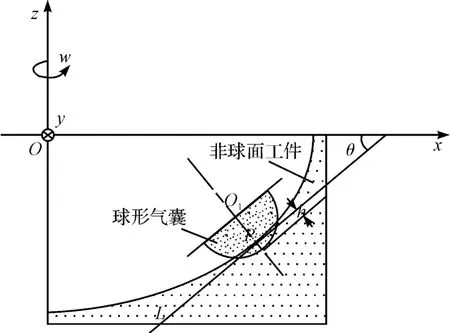
图1 球形气囊抛光椭球工件几何模型简图
非球面工件绕Z 轴旋转,球形气囊研抛头与非球面工件接触于点P(x0,0,z0),在压力作用下形成接触面S。由于实际的研抛过程十分复杂,非线性因素很多,为了更好地体现研抛过程中的主要特点,本研究假设研抛时球形气囊内部压强较大,压缩量较小,气囊压缩变形对气囊整体形状影响不大。所以研抛过程中视气囊为半径为R 的球。
1.2 数学模型的建立和几何算法
在图1 中,假设球形气囊的中心位于点O1(x1,0,z1),工件表面P 点的切线L 与坐标轴x 的夹角为θ,气囊压缩量为h,则:

所以球形气囊的方程为:

从式(1)可以看出,O1(x1,0,z1)由气囊压缩量为h 决定。
假设a、b 分别为椭球母线长半轴长度与短半轴长度,工件的曲面方程为:

所以:

式中:x0,z0—点P(x0,0,z0)的坐标值。
从而图1 中的切线L 的方程可以定义为:

假设球形气囊与椭球工件的接触边界为L1,接触面S 在L 平面上的投影为A,投影面A 的边界为L2,则在图1 中,沿Z 轴负方向看,所形成的俯视图如图2所示。

图2 球形气囊抛光椭球工件俯视图
由式(2,3)可得接触边界L1的方程为:

其中x1和z1如式(1)所示,由气囊压缩量为h 决定,所以接触面边界L1随h 的变化而变化。
当接触面边界L1上的点(xL1,yL1,zL1)投影到A 平面,则各点投影线为:

把点(xL1,yL1,zL1)在A 上的投影定义为(xL2,yL2,zL2),其就是投影面A 的边界L2。所以L2的方程为:
其中(xL2,yL2,zL2)由(xL1,yL1,zL1)决定,(xL1,yL1,zL1)又由(x1,0,z1)决定。又由式(1)可知,(x1,0,z1)随着h 而变化,所以L1和L2也随h 而变化。
假设(xA,zA)是投影面A 内的某一点,则投影面积A 为:

1.3 数值方法分析
利用离散点的数值方法对不同研抛位置P 的接触面的分析如图3所示,h 取1.152 mm。从边缘点的坐标值可以得出x0值越小,接触面积投影边界越接近于圆形,面积越小;从点的疏密程度可以看出x0值越大,接触面积越大,投影面在x 方向压缩量更大。这主要是因为x0值越小,工件椭球母线曲率变化更为平滑,在投影平面内对称性更好。

图3 不同位置的接触面投影形貌
2 仿真分析
本研究采用ABAQUS 和ADAMS 联合仿真。ABAQUS 主要应用非线性动态应力接触分析模块。ADAMS 主要完成运动学的仿真,保存每步的结果,再将运动学的结果导入ABAQUS 中,利用ABAQUS 非线性计算功能完成研抛过程的接触分析。
本研究首先在Pro/E 里进行初始的建模,将Pro/E模型保存为带坐标系的实体。该坐标系原点为球形气囊的球心,Y 方向为接触点法向方向,保存格式转为Parasolid 格式。模型导入ADAMS 中,由于ADAMS 中只完成对运动学的仿真,需要保持球形气囊和椭球面工件的紧密接触,所以本研究对球形气囊和工件设立接触部位的点线接触,设定移动轨迹约束,对球形气囊施加点驱动,并通过赋值样条曲线作为驱动值,工件设定与地面全约束。这样通过控制仿真时间,可以得到工件在椭球面母线上的任意位置的运动情形。
笔者将ADAMS 软件的每步结果输出,转成Parasolid 格式,并导入ABAQUS 中,通过在Hypermesh 中手动切分几何模型体,获得较好的六面体网格划分结果,ABAQUS 网格划分如图4(a)所示。笔者对划分好的网格模型进行材料参数设置,接触主面和接触从面的设置,对工件下表面进行全约束,对球形气囊内表面施加大小为0.03 MPa 的压力,对球形气囊内表面上半部施加20 N的力载荷F,ABAQUS 载荷仿真模型如图4(b)所示。
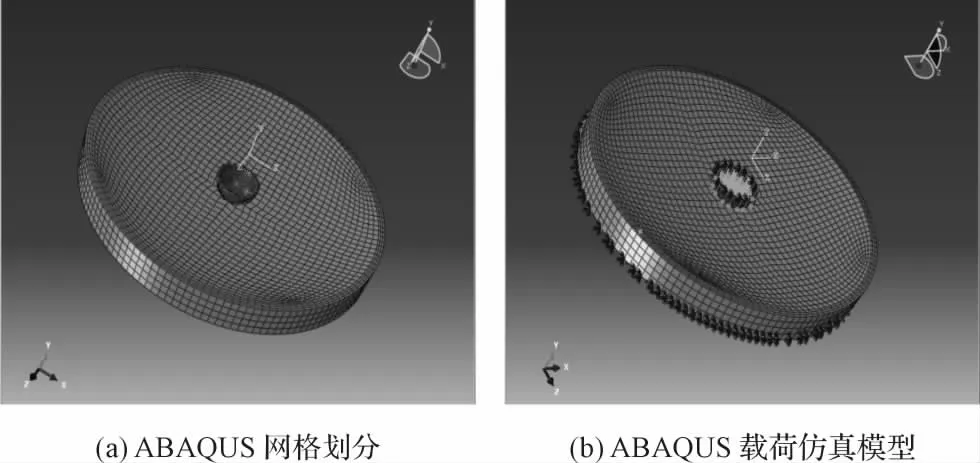
图4 ABAQUS 建模
通仿真得出的部分结果如图5所示。
在图5 中,部分折皱的效果主要是由网格的划分和变形所引起,是视觉效果。图中灰色部分是接触区的边缘,浅灰色区域属于非接触区,黑色部分为接触区最大压力区域。通过网格数的变化和颜色-数值图标可以看出,随着x0值的变大,接触面积变大。对比图5(a)、5(e)可得,最大压力区域在整个接触区的位置发生偏移,形状逐渐变得不规则,这主要因为非球面随着x0值变大,母线曲率变化增大,接触区形貌更不规则。
对比图3,从仿真的结果可以看出:参数模型计算结果和三维实体接触软件模拟计算结果接近。
本研究将整个椭球工件母线分为50 个点,并用ABAQUS 进行了分析,记录每点的仿真接触面积,同计算出的接触面积做对比,仿真计算和理论计算对比结果如图6所示。从图6 中可以看出仿真结果和计算结果变化趋势相同,两者差异在4%以内。

图5 ABAQUS 仿真计算

图6 仿真计算和理论计算对比
3 结束语
气囊抛光工具与传统抛光工具相比,它们不仅能够灵活地拟合曲面工件的形状,而且在接触区域上具有均匀的接触压力。本研究根据研抛工具系统工作原理,在一定假设下,分析了气囊抛光过程中研抛头和待磨工件的接触边界。研究中提出的非球面表面接触面积的几何算法,通过有限元软件的仿真验证,将计算结果和仿真结果进行了比较,得出几何算法解得的结果和仿真结果变化趋势相同,且误差范围很小。
该算法很好地解决了接触边界难以确定的问题,所以在气囊抛光工艺中可以用几何算法求解接触面积。
[1]宋剑波,姚英学,谢大纲,等.超精密气囊工具抛光方法的研究[J].华中科技大学学报:自然科学版,2007,35(zl):104-107.
[2]计时鸣,张 利,金明生,等.气囊抛光技术及其研究现状[J].机电工程,2010,27(5):86-93.
[3]ZHANG W,LI H Y,JIN H.Research on digital simulation and experiment of removal function of ballonet tool polishing[J].Journal of Mechanical Engineering.,2009,45(2):308-312.
[4]ZHAN Jian-ming.Study on the manufacturing process controlling for aspheric surface ballonet polishing[J].The International Journal of Advanced Manufacturing Technology,2013(69):171-179.
[5]LIU Y T,CHANG W C,YAMAGATA Y.A study on optimal compensation cutting for an aspheric surface using the Taguchi method[J].CIRP Journal of Manufacturing Science and Technology,2010(3):40-48.
[6]PAN C T,WU T T,LIU Y T,et al.Fabrication of aspheric surface using ultraprecision cutting and BMG molding[J].Journal of Materials Processing Technology,2009,209(11):5014-5023.
[7]BINGHAM,R G,WALKER.Novel automated process for aspheric surfaces[J].Proceedings of SPIE,2000,4093(510):445-450.
[8]宋剑锋.曲面光学零件气囊抛光工艺参数优化及相关技术研究[D].哈尔滨:哈尔滨工业大学机电工程学院,2009.
[9]张 才,计时鸣,金明生,等.磁控式气囊抛光实验研究[J].轻工机械,2012,30(5):16-20.
[10]AGBARAJI C,RAMAN S.Basic observations in the flat lapping of aluminum and steels using standard abrasives[J].The International Journal of Advanced Manufacturing Technology,2009,44(3-4):293-305.
[11]JEONG S,LEE S,PARK B,et al.Mechanical effects of polishing pad in copper electrochemical mechanical deposition for planarization[J].Current Applied Physics,2010,10(1):299-304.
[12]BIBIK EE.Mechanochemistry of metal polishing with an abrasive suspension[J].Russian Journal of Applied Chemistry,2010(83):811-815.