基于改进H∞算法的线控转向系统仿真研究
2014-11-18朱凌俊于苏楠刘晓帆赵鼎成
朱凌俊,于苏楠,刘晓帆,赵鼎成
(杭州电子科技大学 机械工程学院,浙江 杭州 310018)
0 引言
近年来,随着电子和控制技术的不断发展,汽车电动助力转向系统迅速发展。各种电力转向系统的应用改善了车辆转向角的转动特征、转向灵敏性特征以及转向平稳性特征[1-2]。然而,现在的转向系统仍处于机械连接阶段,转向性能随着速度、转向角以及路面与轮胎附着力条件的改变具有非线性时变特征。为了使车辆沿着预订路线行驶,司机必须调整他们自身,因此增加了司机的身心负担,尤其是非职业司机,他们难以适应这种调整[3]。因此,各国的研究者正在研究新技术来解决以上转向系统的问题。在这种情况下,线控转向应运而生。该项新技术已经引起了广泛的关注及大量的研究,如法国雪铁龙公司的概念车,德国克莱斯勒汽车公司的概念车8129,韩国起亚公司的概念车以及2011年德国航天中心和交通科学技术研究协会设计的试验车辆FASCarll。除此之外,车辆零部件生产商,车辆设计公司以及很多大学都在研究线控转向。
研究线控转向控制策略的主要目的在于研究车辆运行时以及在道路复杂条件下,如何保持车辆平稳性、车辆追踪以及防干扰的能力。目前,有大量的控制策略应用于线控转向,其中几个典型的案例已经获得了一定的效果,如PID,LQG,H∞等等[4-5]。来自加拿大的学者Zames 在研究设计目标的不合理性以及LQG的干扰极限中,提出了H∞的控制思路[6]。经过20 多年的发展,H∞控制理论已经成为成功解决鲁棒控制问题的理论系统之一。其中加权函数的选择起到了关键作用,其能够直接决定线控转向性能的好坏。然而,一位优秀的工程师设计线控转向的经验对于加权函数的选择非常重要,这需要工程师进行大量重复的微积分计算[7]。这些问题都给线控转向H∞控制器的设计带来巨大的困难。
本研究对H∞控制运算进行改进,通过反求法来避开加权函数的选择。本研究对H∞运算中S/T 奇异值曲线的研究和观察,以H∞运算为基础,构建闭环传递函数,然后运用符合线控转向鲁棒性能要求的预期S/T 曲线逆转闭环系统。这是一种从工程意义上简化的H∞回路成形的算法。其物理概念清晰,解题过程相当简单,最终的控制器阶数很低。S/T 曲线和阶跃响应的仿真结果显示,改良后的H∞运算的鲁棒性和平稳性都要比传统的好很多。
1 线控转向的动力学模型及其分析
线控转向采用的是线传控制技术,把信号传送到电子控制装置,然后通过电子控制装置传送的命令去控制转向执行程序集来完成转向命令,最后司机能够意识到驾驶意图。线控转向去除了传统的机械连接。理论上,其能自由地设计角度和力的转向特性,也能提供设计转向特性的广大空间,具有巨大的应用市场以及无限的发展潜能。
1.1 线控转向原理
笔者研究的线控转向结构原理图如图1 所示。主要分为方向盘总成、控制器以及前轮转向总成。方向盘总成包括方向盘、方向盘力矩转角传感器、电机减速器、电机驱动器、方向盘回正力矩电机(路感电机)等,其主要功能是将驾驶员的转向意图(通过测量方向盘转角)转换成数字信号传递给控制器,同时接收控制器送来的力矩信号产生方向盘回正力矩以提供给驾驶员相应的路感信息。转向执行总成包括前轮转角扭矩传感器、转向电机驱动器、转向电机及相关传感器等,其主要接受控制器的命令,由转向执行电机控制转向车轮转角,实现驾驶员的转向意图。除了机械硬件之外,线控转向和传统的转向系统最直接的差异就在于线控转向具有3 种功能的控制器:控制路感电机,控制前轮转角以及对整个系统主要部件的容差控制[8]。控制器对采集的信号进行分析处理,判别汽车的运动状态,向方向盘回正力矩电机和转向执行电机发送指令,保证各种工况下都具有理想响应。

图1 线控转向结构原理图
1.2 线控转向的动力学模型
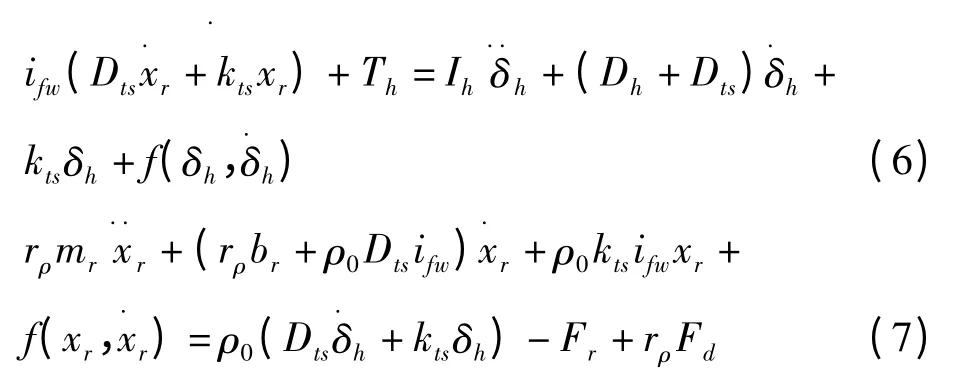
线控转向受力示意图如图2 所示。根据图2,线控转向可分为两部分,路感装置以及方向盘仿真的受力原理图如图2(a)所示。操纵方向舵装置的受力原理图如图2(b)所示。
在图2(a)中,动力学方程如下:

在图2(b)中,动力学方程如下:

齿条传动模型与传统的转向系统模型相似,表示如下:

式中:mr—架及其质量,br—阻尼系数,xr—架的位移,Tr—作用于小齿条的反作用扭矩,Fr—转向阻力,Fd—随机干扰阻力,ifw—电机的减速比。
根据线控转向结构和力的条件,可以得出以下结论:

其中:ρ—转向系数,ims—电机的减速比模拟驾驶的感觉。
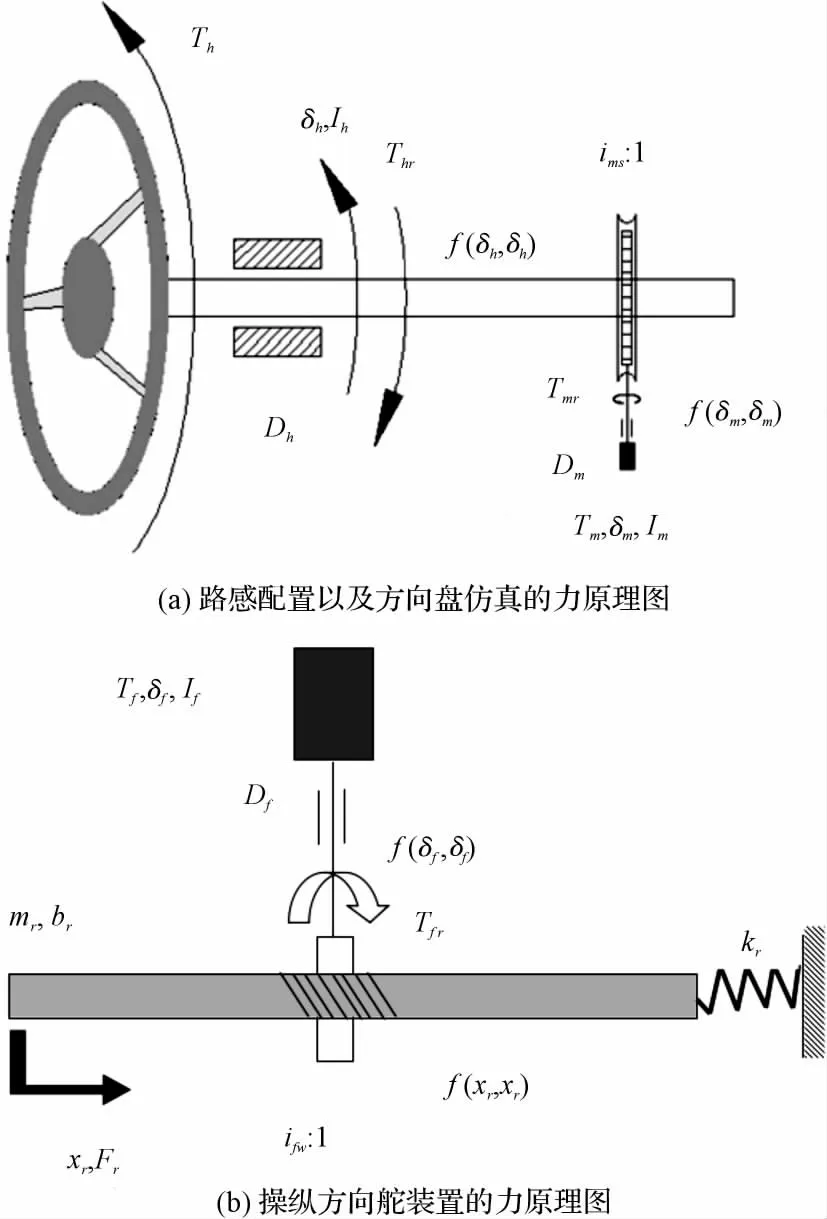
图2 线控转向受力示意图
基于上述方程,可以得出线控转向的动力学方程:
1.3 简化模型和分析
转向阻力主要来自路面、轮胎和转向系统内部摩擦。由于轮胎材料、结构、压力、垂直载荷和工作条件的影响,轮胎和路面的作用非常复杂,系统的内部摩擦也相当复杂。因此,上述因素导致转向阻力具有明显的非线性特征。本研究作的总体分析可以不必考虑其精度模型转向系统的转向阻力,只要掌握前角和道路阻力扭矩之间的关系。当基于线控转向时,本研究可以假设前角和道路阻力扭矩之间的关系是线性的,等效线性弹簧,其刚度为Kr。
以下是其表达式:

所以,线控转向的动力学方程简化后是:

可以通过拉普拉斯变换得到下面的关系式:

式中:Xr(s),δh(s),Th(s)—xr,δh,Th的拉普拉斯变换。P(s),Q(s)的表达式如下:
2 控制系统的分析和设计
2.1 线控转向控制系统
根据动力学模型的分析,本研究可以得出的系统框图如图3 所示。
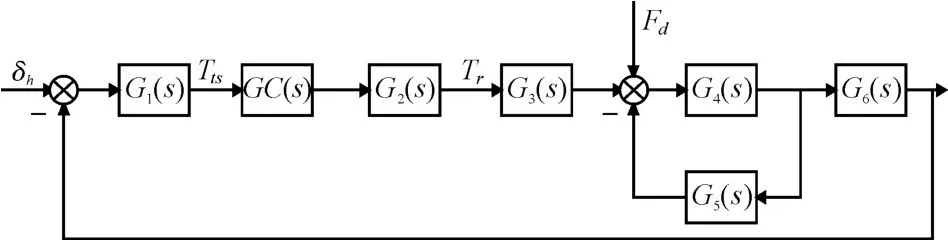
图3 线控转向系统框图
线控转向系统框图中各部分的传递函数如表1所示。

表1 线控转系传递函数
线控转向实际上是一个角度控制系统。控制器根据输入和输出之间的差异角度(即扭矩传感器信号),控制功率电动机提供电源。然而,道路和工作条件会影响传感器的输出信号,扭矩传感器中有噪音,所以转矩信号应该调整到电动机控制器转移前,确保信号可以反映驾驶员的驾驶意图,电力马达可以准确提供电力。假设控制器调整函数为C(s)。首先,本研究应该输入方向盘转角δh=0,并将原系统框图转换为标准的H∞反馈结构如图4 所示。
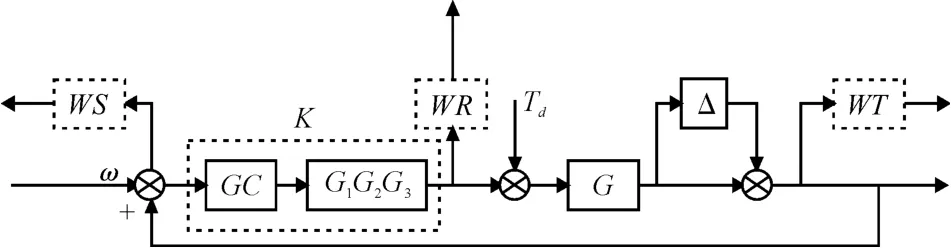
图4 控制器框图
整个系统的控制器:

控制对象:

据线控转向仿真参数:

可以获得特定的传递函数表达式:

所以,最终可以计算控制对象为:

2.2 改进的H∞鲁棒控制算法
本研究可以通过优化H∞空间性能指标的无限规范,从H∞鲁棒控制理论中,获得具有鲁棒性能的控制器[9]。H∞鲁棒控制理论提供了一些可用来解决系统的鲁棒控制问题方法,例如模型可能在一定范围内存在不确定性和外界干扰信号。不确定性模型包括两个部分:一个是非结构性不确定性的不确定性即高频未建模的动态特性,另一个是模型参数的不确定性。建模一般使用一个可组装的不确定性对象代表对象模型。该种装置可以是结构化或非结构化。非结构化乘法不确定性是上述两种不确定性的统一表达,其表达式如下:

一般来说,乘法扰动Δ 具有高通特性。更重要的是,本研究不要求显示基于H∞的标准框架下的关于Δ 的表达式,需要了解的是‖Δmax‖∞相应的极限值。H∞混合灵敏度控制策略塑造封闭的传递函数,如通过增益直接成形算法的灵敏度函数和补灵敏度函数,本研究可以在可能出现在开环增益成形时消除高峰值,从而取代加权函数Δ 的影响,并确保通过‖Δmax‖∞加权函数WT(s),为优化问题提供了极大的灵活性。这里笔者选择上限Δ 作为加权函数,并保证WT(s)模型受到扰动时的系统鲁棒性,然后就可以摆脱原来的扰动模型的Δ,即Δ=0,而且反干扰和信号跟踪能力可以通过加权函数得到保证。但在这个过程中关键的是加权函数的选择,其直接决定了控制系统的性能。为获得预期的加权函数,设计师必须通过大量重复迭代的大型微积分计算以及其自身积累实践的经验来做出选择,这也是没有捷径可言[10]。
在H∞电路混合灵敏度奇异值成形控制的基础上笔者观察和研究S/T 的曲线,从实际工程意义出发,根据带宽频率,高频渐近线的斜率,最大奇异值,然后回过头来改变控制器K,构建互补灵敏度函数T。通过S和T 之间的相关性,本研究间接地确定了灵敏度函数S 的形状,然后保证了系统的鲁棒性能。
假设带宽频率闭环要求是1/T1,为使T 的构造比较容易,这里的转角频率近似为带宽频率,高频渐近线的频率是20n dB,n 是一个整数,其范围从1~3,当n过大时,控制顺序将上升,这种现象对控制器不利,并且控制效果改善不明显。为了保证系统跟踪目标值与非静态的差异,选择最大奇异值等于1,然后构造补灵敏度函数T 如下:

控制器理想的S/T 的曲线:

这个求解过程是很容易的,避免了很多迭代演算上的加权函数,并且其是一个基于工程意义上简化的H∞回路成形算法。
2.3 线控转向控制系统的设计
为了保证系统跟踪参考信号w 与非静态的差异,本研究选择最大奇异互补灵敏度函数值等于1。系统的带宽决定了响应速度(即线控转向系统中要求的大质量响应速度),所以,这里带宽的值不小于100 rad/s。
为了抑制如传感器的噪声等不确定的信号所产生的控制误差的影响,以及保证系统的鲁棒性能,本研究选择高频渐近线的斜率等于-60 dB/dec。因此,这三阶惯性系统频谱曲线最大奇异值1 由T 的单数价值曲线构成。为了计算方便,角频率近似等于带宽频率,得到下式:

这是线控转向的控制器:

然后调节控制器如下:

与普通H∞混合灵敏度控制策略进行比较(选择文献加权函数[6]中),本研究选择的H∞混合灵敏度的3个参数:WS=15/(s +0.5),WR=0.01,WT=58(s +30)/(s+6 000),使得设计H∞混合灵敏度控制器为对象的过程中G(s)变得更容易。然后,可以得出结论如下:

然后调节控制器如下:

3 控制系统模拟与分析
通过改进的H∞算法设计的控制器是一个三阶控制器,而传统的H∞控制器通过设计选择加权函数是一个四阶控制器。
通过模拟和分析两种控制器的影响,本研究可以得到前轮角度的单位阶跃响应曲线如图5 所示。根据该曲线,当没有控制器作用时,单位阶跃响应是0.138 s以及超调量是63.8%,当改进H∞控制时,稳定时间是0.075 s,当传统的H∞混合灵敏度控制器作用时,稳定时间为0.082 s。这表明在保证了鲁棒稳定性的前提下,改进的H∞控制器具有更好的响应性能。
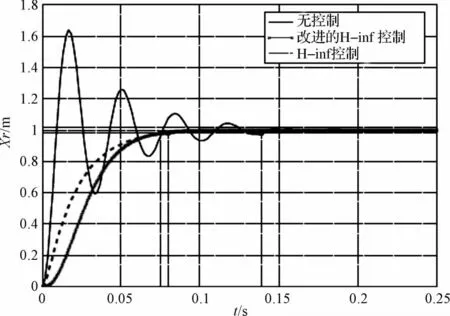
图5 机架位移阶跃响应曲线
由上述两种方法所设计的控制器的闭环频谱分析,可以得到的频谱图如图6 所示。根据图6 中两种不同类型的控制器都可以得到S/T 曲线的预期曲线的形状,当改进的H∞控制工程作用时,系统的灵敏度函数的增益是0.316%,在低频时,闭合环路的闭合斜率为-60 dB/dec,当传统的H∞控制作用时,系统的灵敏度函数的增益是1.13%,在低频时,闭合环路的闭合斜率为-40 dB/dec。所以其表现并不像改进的H∞控制器一样完美。

图6 线控转向的频谱曲线
4 结束语
本研究主要论述了线控转向系统的动态建模,以及分析和合理的简化。为了避免大量迭代演算,本研究提出了一种新的方法来设计一种改进的H∞控制器,并设计控制器的线控转向系统。通过本研究设计改进的控制器与传统控制器来做比较,由闭环频谱和仿真结果的曲线表明,本研究提出的方法简单而有效,并且改进的控制器具有比传统的控制器更好的鲁棒稳定;由干扰阶跃响应表明,采用改进后的控制器具有较好的鲁棒性;由参数摄动的情况下所采取的仿真结果表明,新的控制器仍然可以保持系统的稳定。综上所述,该控制器的设计完全满足控制要求。
[1]HAGGAG S,ALSTROM D,EGELJA C S.A Modeling,control,and validation of an electro-hydraulic steer-by-wire system for articulated vehicle applications[J].IEEE/ASME Transactions on Mechatronics,2005,10(6):688-692.
[2]STANTON N A,MARSDEN P.From fly-by-wire to driveby-wire:safety implications of automation in vehicles[J].Automotive Engineering,2001,109(9):102-106.
[3]CHOI S,ALONSO J J,KROO H M.Two-level multi-fidelity design optimization studies for supersonic jets[J].Journal of Aircraft,2009,146(3):776-790.
[4]OH S W,CHAE H C,YUN S C,et al.The Design of a controller for the steer-by-wire system[J].JSME international Journal Series C,2004,47(3):38-44.
[5]AMRLLEIN M,KREIN P T.Dynamic simulation for analysis of hybrid electric vehicle systems and subsystems interactions,including power electronics[J].IEEE Transactions on,Vehicular Technology,2005,154(3):825-836.
[6]CHEN Xiang,YANG Tie-bao,CHEN Xiao-qun.A generic model-based advanced control of electric power-assisted steering systems[J].IEEE Transactions on Control Systems Technology,2008,16(6):1289-1300.
[7]杨 琳,赵书强.H∞PSS 设计中加权函数的选择及模型降阶[J].华北电力大学学报,2003,30(2):15-19.
[8]杨文兴,杨俊智,周 强.汽车线控转向系统的现状及关键技术研究[J].机械制造,2013,51(9):79-81.
[9]PAOLO F,FRANCESCO B,JAHAN A.Predictive active steeringcontrol for autonomous vehicle systems[J].IEEE Transactions on Control Systems Technology,2007,15(3):566-580.
[10]SELAMAT H,YUSOF R,GOODALL R.M.Self-tuning control foractive steering of a railway vehicle with solid-axle wheel sets[J].IET Control Theory and Applications,2008,5(2):374-383.
