基于ANSYS/LS-DYNA凸轮机构的动态接触分析
2013-12-18董龙治王保民
董龙治, 王保民
(陕西理工学院 机械工程学院, 陕西 汉中 723003)
在各种机械,特别是自动控制装置中,广泛采用着各种形式的凸轮机构.只要正确设计出凸轮的轮廓曲线,推杆就可以得到预期的运动规律,而且响应快速,机构简单紧凑.根据推杆的运动规律,可以在PRO/E中对凸轮精确建模.利用ANSYS/LS-DYNA处理的等效应力分布图,可以直观观察凸轮机构在不同时刻的应力分布情况,省去复杂的计算公式[1].
1 凸轮的建模
1)打开PRO/E—新建零件,插入—模型基准—曲线—从方程,以PRT_CSYS_DEF为笛卡尔坐标系,曲线方程依次为推程、远休止、回程、近休止凸轮轮廓的变化值.以Front为草绘平面,通过边创建图元将4条曲线变为当前曲线,并保存sec格式,关闭PRO/E.
2)打开PRO/E—新建零件,插入—模型基准—图形,命名为tulun,再使用草绘—数据来自文件—文件系统,选取保存的sec格式的文件,退出图形.
3)以Front为草绘平面,草绘一个半径比基圆小10mm的圆.插入—可变截面扫描,草绘的圆为原点轨迹—可变截面,创建扫描剖面如图1所示,长度为10mm的线段驱动公式为sd3=10+evalgraph(′tulun′,trajpar*360),完成后如图2所示.
4)通过填充、加厚、拉伸等命令完成凸轮的三维模型.在PRO/E组件中,将凸轮与平底推杆进行装配[2],如图3所示.
图1 扫描剖面图

图2 凸轮的轮廓
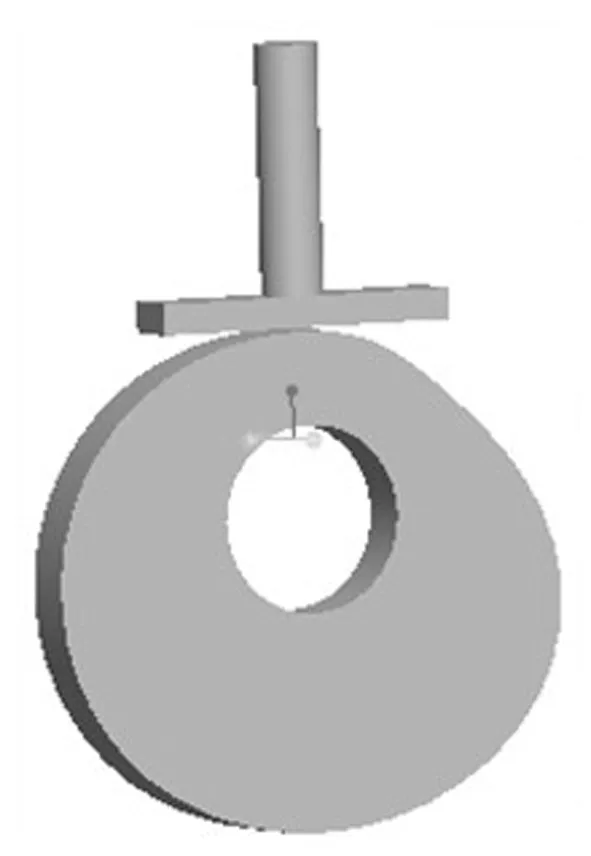
图3 对心平底推杆凸轮机构
2 凸轮的动态接触分析
ANSYS/LS-DYNA是世界上最著名的通用显示非线性动力分析程序,能够模拟真实世界的各种复杂几何非线性、材料非线性和接触非线性问题,广泛应用到机械、电子、能源、冶金、航天航空、土木等领域,并对这些领域产生了深远影响.凸轮机构在ANSYS/LS-DYNA中动态接触分析的步骤如下:
2.1 导入模型
装配体通过PRO/E和ANSYS的无缝连接,导入到ANSYS/LS-DYNA中,PRO/E和ANSYS/LS-DYNA要统一单位(长度mm、质量kg、时间s、应力kPa、力mN).
2.2 定义单元类型
选用solid164和shell163两种单元,solid164用于三维的显示结构实体单元,由8节点构成,没有实常数.Shell163是一个4节点显示结构薄壳单元,有弯曲和膜特征,可加平面和法向载荷.设置shell163实常数:剪切因数SHRF为5/6、积分点数值NIP为3、节点处的厚度T1为0.1[3].
2.3 设置单元材料
凸轮结构的材料选用45钢,密度7.85×10-6kg/mm3、弹性模量2.1×108kPa、泊松比0.269.设置4种材料:第1和第3种材料相同,均为Linear—Elastic—Isotropic、第2种材料为Rigid material,约束All—disps和X and Y rotate、第4种材料为Rigid material,约束Y and Z disps和All rotations.
2.4 划分网格
设置凸轮实体的网格属性:MAT为1、REAL为1、TYPE为solid164.凸轮内圈的网格属性:MAT为2、REAL为1、TYPE为shell163.推杆的网格属性:MAT为3、REAL为1、TYPE为solid164.推杆上部外圈的属性:MAT为4、REAL为1、TYPE为shell163.设置好网格属性后,分别对它们进行网格划分[4].
2.5 创建PART,定义数组参数
通过Main Menu—Preprocessor—LS—DYNA Options—Part options创建所有的PART.选取推杆顶部平面的节点,创建节点组元命名为jiedian.Parameters—Array Parameters—Define/Edit----,定义数组参数:time=[0,1]、F=[100000/jiedian个数,100000/jiedian个数]、RV=[25.12,25.12].
2.6 定义接触,施加驱动和载荷
Main Menu—Preprocessor—LS—DYNA Options—Contact—Define Contact:采用面面自动接触,接触面为PART3(推杆),目标面为PART1(凸轮).Main Menu—Preprocessor—LS—DYNA Options—Loading Options—Specify Loads:PART2施加RBOZ的驱动,time values为time,data values为RV(凸轮施加旋转驱动25.12rad/s).Jiedian施加Fx的力,time values为time,data values为F(推杆受到100 000mN的力).
2.7 求解控制与求解
Main Menu—Solution—Time Controls—Solution Time:求解时间设定为0.25s(凸轮转1周所用时间).Main Menu—Solution—Output Controls—Output File Types:设置输出格式为ANSYS and LS—DYNA.Main Menu—Solution—Output Controls—File Output Freq—Number of Steps:设置输出步数都为100.设置好后进行求解.
2.8 观察结果
POST1每次只能读入某个载荷步的结果,POST26可以查看结果数据随时间、载荷、频率等其他变量的变化情况,LS—PREPOST是专门为LS—DYNA求解器开发的后处理.图4为通过LS—PREPOST得到的对心平底推杆盘形凸轮机构在不同时刻的等效应力云图,图5为在不同时刻的等效应变云图,图6为推杆的位移变化规律.

(a) 0.075s

(b) 0.16s图4 不同时刻的等效应力云图
3 结束语
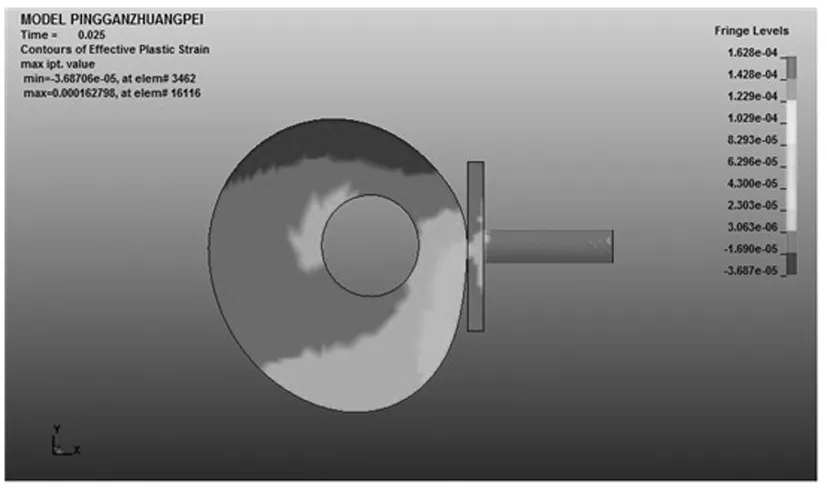
(a)0.025s

(b) 0.185s图5 不同时刻的等效应变云图

图6 推杆的位移变化规律
详细介绍了凸轮的建模过程和基于ANSYS/LS-DYNA凸轮机构动态接触分析的步骤,利用LS-DYNA强大的后处理功能,得出凸轮机构应力随时间的变化情况,通过图形形式显示的结果更直观,省去了复杂的公式计算过程.在后处理中还可以得到推杆的位移变化规律,验证设计的凸轮机构是否满足要求.
[1]王领,包继华,刘振,等.基于ANSYS的凸轮从动件运动分析[J].煤矿机械, 2011, 32(4):110-112.
[2]刘永霞.基于 Pro/E参数化建模技术的凸轮轮廓线精确设计[J].南华大学学报:自然科学版, 2011, 25(3):35-38.
[3]燕芸,王建宇.基于ANSYS/ LS- DYNA的齿轮接触应力分析[J].机械管理开发, 2011, 124(6):211-212.
[4]柴群,万朝燕.基于ANSYS/LS-DYNA的蜗轮蜗杆动态接触分析[J].现代制造工程, 2006(11):46-48.
