基于多帧相关算法的稀布阵雷达目标航迹检测
2013-12-17陆迪,张远
陆 迪,张 远
(中国电子科技集团公司第38研究所数字技术部,安徽合肥 230031)
为提高稀布阵脉冲孔径雷达探测威力和小目标的检测能力,常通过降低检测门限,在原检测门限下的小信号被检测出后,虚警数量会呈几何级数增长,雷达终端数据处理采用常规处理方法,已无法从虚警中正确得到目标航迹。TBD(Tracking Before Detection)技术是一种在低信噪比下对目标进行检测与跟踪的技术,与一般的检测方法不同,雷达终端收到雷达每次探测的点迹数据后,并不作检测输出,而是将其进行存储,对帧间数据的相关处理,通过数帧的积累,将目标航迹被估计出来后,检测结果与目标航迹同时宣布。目前常用的TBD方法主要有多帧相关法、粒子滤波法、Hough变换法、动态规划方法等[1]。稀布阵综合脉冲孔径雷达采用全向收发、全数字波束形成、长相干积累等处理手段[2],具有多普勒频道多、速度分辨率高、数据率快、数据量大的特点,传统TBD方法由于计算量大、实时性无法满足该雷达的处理要求,根据稀布阵综合脉冲孔径雷达的特点,采用多帧相关处理方法进行高虚警条件下的目标检测和跟踪处理,提供了一种新的目标检测方法。通过仿真和雷达的校飞结果比对,证明该方法能在各种复杂背景条件下有效地解决高虚警条件下的目标自动检测、目标自动起始准确率高、计算量小、实时性高。
1 原理
多帧相关处理原理如图1所示。多帧相关处理区的原始点迹首先经过多帧积累,达到一定帧数后,数据作检测处理[3]。在积累多帧数据的滑窗内,将首帧的数据按照距离波门、方位波门、高度波门、多普勒速度波门等多维门限,对帧间数据进行多维相关处理,处理完毕后,作简单判决。若首帧点迹数据与其他帧数据有某一帧数以上数据相关,则认为满足这一条件的点迹为目标真实点迹,一方面将真实点迹输出,另一方面将其点迹串联形成的运动轨迹,作为目标起始航迹。此时,航迹的起始与目标的检测同时完成。若首帧点迹数据与其他帧数据的相关帧数小于某一帧数,则认为此数据为雷达的虚警点迹数据,将其作丢弃处理,以减少虚警概率。

图1 多帧相关检测处理流程
2 多帧相关实现
2.1 新帧数据的判别
对于新进的第k帧数据,首先将该数据的幅度值与设定的幅度波门相比较,这里的波门可设定较高,若超过门限,点迹直接输出,低于门限,则与多帧相关处理区域内起始的可靠航迹进行相关,如果相关成功,则此点迹也作为直接输出处理,对于未相关成功的点迹,进行多帧相关处理。新帧数据的处理流程如图2所示。

图2 新帧数据处理流程
2.2 多帧相关处理过程
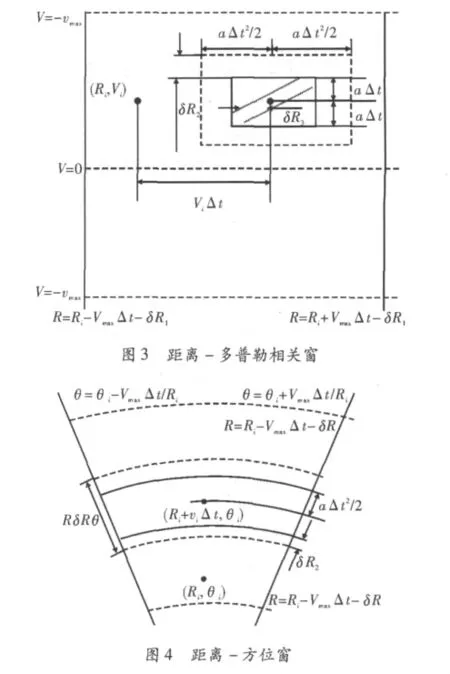
采用3/7起始准则进行验证说明。以k-6帧到第k帧数据进行多帧相关处理。假定选择k帧的第i个数据,假定相关成功数目为Nc=0,按目标最大速度2马赫计算,可得k-1帧相关距离波门,若相关波门中存在点迹,则进一步作多维网格相关判断。网格图的建立包含预测目标的位置和机动情况。预测位置为一个多维窗、有距离-多普勒窗、距离-方位窗等[4]。
对于第k-5帧数据,落入波门内的点迹均为虚警点,相关不成功,此时相关成功数据依然为Nc=0,处理k-4帧相关数据时,波门进一步增大,此时有相关上的点迹,则相关成功数目为Nc=1。可在下一帧相关时,添加航向波门信息,进一步增加相关的准确度,其他帧数据,也做类似相关处理。对于Nc≥2的情况,可以作滤波处理,以便提高其跟踪性能。如果前一个过门限的点迹落入后一个过门限点迹的相关窗内,则两者相关,通过相关网格,进一步减少数据处理的计算量,提高数据处理性能。要补充说明的是,为解决区域交叉航迹起始的问题,对于落入波门的其他目标真实点迹,作恒虚警处理。
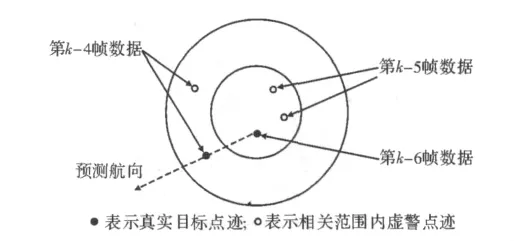
图5 多帧相关示意图
2.3 检测判决
多帧相关处理完成后,对于与k-6帧数据的成功相关数目,分为以下两种情况:
(1)Nc≥2,多帧内相关点迹≥3,符合3/7起始准则,可判定此点为真实目标点迹,将此点与相关点迹都进行输出,另一方面将其点迹串联形成的运动轨迹,作为起始航迹,航迹的起始与目标的检测同时完成。
(2)Nc<2,多帧内相关点迹<3,不符合3/7起始准则,则判定此点为雷达的虚警点迹,作丢弃处理。第k+1帧数据的到来,帧内的数据作一次调整,此时相关的帧为k-5~k+1,多帧相关做滑窗处理,完成后续帧数据的多帧相关处理。如果目标点迹情况较好,在N(N<7)帧内已经积累3帧数据,可动态调整起始准则,如3/4,3/5,/3/6等,以加快目标航迹的起始,缩短起始时间。
2.4 起始准则的确定
在多帧相关处理区,按照M/N的起始准则多帧相关后,目标的发现概率P'd和虚警概率Pt的计算公式如式(1)和式(2)所示。

对目标的多普勒速度,如果按2马赫计算,精度按0.6 m/s计算,假设目标已经过距离和方位相关,在此处相关区域内,虚警数最多为4个,单个虚警的模糊多普勒最多为3,两点间错误相关概率Pc=0.6×4×3/(340×2)=0.010 6,按上述公式计算可得表1。
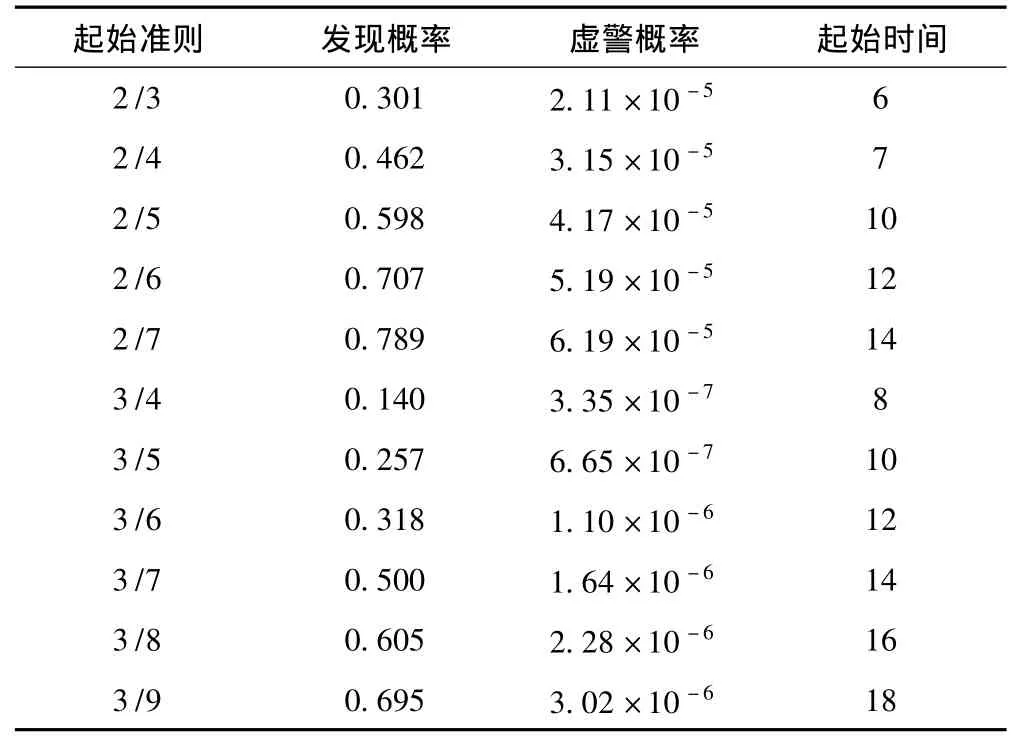
表1 各起始准则下的发现概率和虚警概率
综合雷达的虚警概率要求、发现概率要求与起始时间考虑,起始准则选择为3/7合适。
3 算法结果
在稀布阵雷达实际探测数据中,按上述算法进行目标航迹自动起始的结果如图6所示。
图6 虚警概率10-3的条件下算法检测结果
从图6中可以看出,在20 000点/每帧的虚警条件下,该算法能正确进行目标航迹的检测,无虚假航迹产生。经与ADS-B的数据进行比对,ADS-B能发现的目标都能被该算法检测出来。实际结果表明,该算法能在实际应用环境中满足稀布阵雷达高虚警条件下的目标航迹自动检测需求,具有检测概率高的优点[5]。
4 结束语
采用多帧相关技术的TBD处理方法,在高输入虚警概率条件下,距离-多普勒坐标系和距离-方位坐标系中基于多帧相关积累的TBD算法,采用速度搜索、距离搜索和方位搜索的方法,有效利用了稀布阵雷达的数据特性,通过多帧相关处理,降低了目标的虚警概率,同时完成目标航迹的全自动起始和跟踪,该方法在雷达实际应用中也验证了有效性,成功完成雷达的数据处理。
[1]荆丹,王俊.基于粒子滤波理论的雷达多目标TBD检测[J].雷达科学与技术技术,2008(1):48-51.
[2]赵光辉.基于SIAR体制的稀布阵米波雷达若干问题研究[D].西安:西安电子科技大学,2008.
[3]韩婧.微波稀布阵雷达目标检测技术的设计与实现[D].西安:西安电子科技大学,2010.
[4]吴顺君,梅晓春.雷达信号处理和数据处理技术[J].北京:电子工业出版社,2008.
[5]庞洁,王增福,杨峰.基于VTA的超视距雷达海面目标检测前跟踪算法[M].现代电子技术,2012,35(9):4-6,9.