步进电动机驱动的M ecanum 轮全向装备运输车的设计
2013-11-22吕永健丛新勇
吕永健,丛新勇,杨 铭
(空军工程大学,陕西西安710038)
0 引 言
传统的轮式运输车存在着转弯半径大、空间利用率低、运动灵活性差、转运效率不高等诸多不利因素,严重影响了装备、物资的运输保障效率。基于麦克纳姆(Mecanum)轮的全向运动技术可以有效地解决这一问题,采用该技术的全向运动设备可以在二维平面上实现前后、左右和原地旋转等运动,具有在不改变车体自身位姿的情况下向任意方向移动的运动特性[1-4]。它克服了传统运动设备无法实现横向移动和原地转动的缺陷,具有更大的运动灵活性,尤其适合工作于空间狭窄有限、对运动灵活性要求较高的场合。
目前,国外已有成熟的Mecanum 轮全向运动设备问世,个别产品甚至已经初步实现了商业化。国内部分院校和科研单位也进行了麦克纳姆轮全向运动技术的研究,但大都停留在理论分析和小型机器人、样车试验阶段,对真正应用于实践的Mecanum轮全向运输车的研究还比较少。本文分析了Mecanum 四轮系统的运动学原理,以步进电动机为驱动电机,对实用的全向装备运输车进行了软硬件设计,并对样车进行了试验验证。
1 Mecanum 轮全向移动系统的运动原理
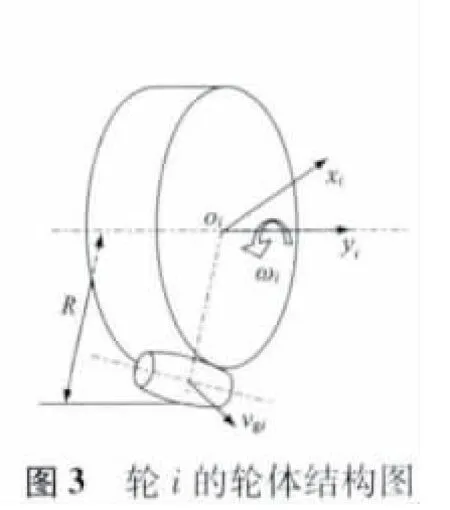
Mecanum 轮的轮体在结构上由轮毂和安装在轮毂外缘上的一组辊子组成,辊子能自由旋转,辊子的轴线与轮的轴线成α 角(通常为45°)。每个Mecanum 轮具有绕轮子轴心转动、绕辊子轴心转动和绕轮子与地面的接触点转动3 个自由度[2]。
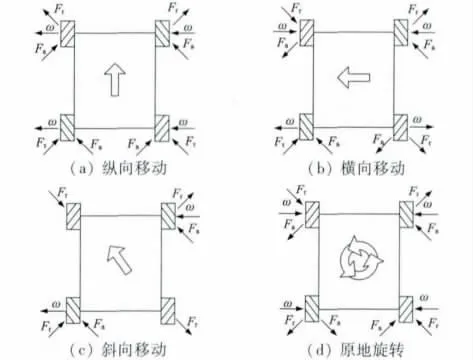
图1 车体运动方向与各轮驱动方向对应关系图
Mecanum 轮无法单独使用,一般需要3 个或3个以上的轮子按照一定的布局安装在一起,依靠相互 之间的配合才可以实现全向运动[3-4]。图1 为Mecanum 四轮系统的车体运动方向与各轮驱动方向的对应关系图,其中Fa为轮子转动时辊子受到的轴向摩擦力;Fr为辊子做从动滚动时受到的滚动摩擦力;为轮子转动的角速度矢量。
1.1 四轮全向移动系统的运动学模型
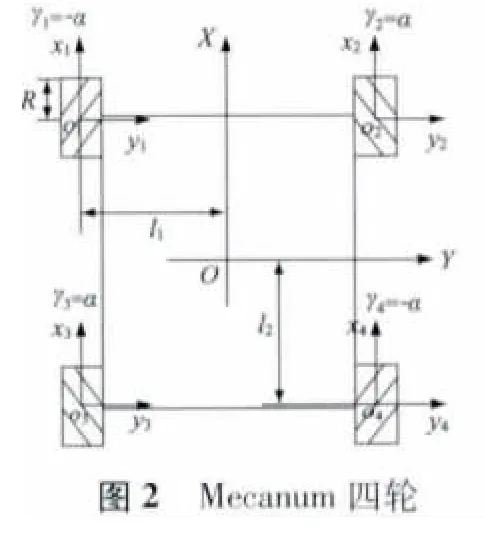
图2、图3 分别为Mecanum 四轮系统的结构图和轮i(i = 1,2,3,4)的轮体结构图,其中XOY 为与车体运动中心O 固联的坐标系,xioiyi为与轮i 转动中心oi固联的坐标系,R 为轮子的半径,l1、l2分别为车体的半横轴长和半纵轴长,γ1、γ2、γ3、γ4分别为四个轮子的辊子轴线与轮子轴线的夹角。4 个Mecanum 轮的角速度分别为ω1、ω2、ω3、ω4;辊子的从动滚动速度为vg1、vg2、vg3、vg4;车体的纵向速度为vx,横向速度为vy,旋转速度为ω0。
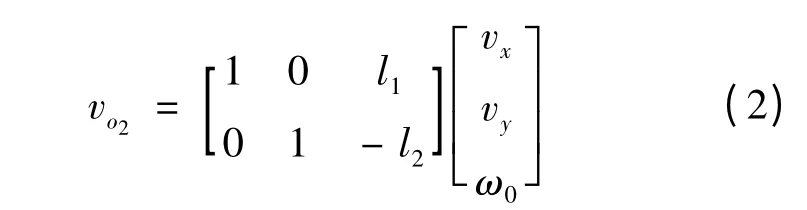
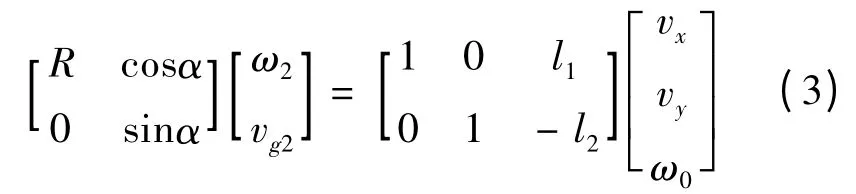
以轮2 为例,在坐标系x2o2y2中可得轮子转动中心o2的移动速度:

在坐标系XOY 中可得o2的移动速度:
由式(1)、式(2)得:
同理,对其他轮子进行分析,可得系统的逆运动学方程:
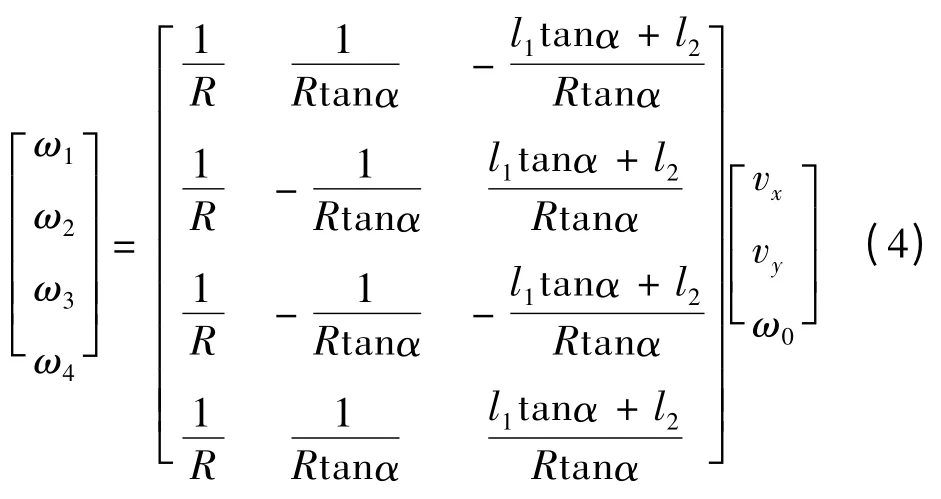

动学雅可比矩阵。
根据运动学原理,当逆运动学雅可比矩阵列不满秩时,系统存在奇异位形,系统运动的自由度减少[1]。对于本文所论述的四轮系统,由式(4)可知,如果rank(K)= 3,则系统具有实现全方位运动的能力,如果rank(K)<3,则系统存在奇异位形,不能实现全方位运动。
1.2 几种特殊的运动
系统在平面上的一般运动可以认为是平动和转动的合成。特殊地,对于系统作纯平动、纯转动(原地旋转)等方式的运动,有如下对应关系:
当系统作纯平动运动时,ω0= 0,代入式(4)有:

即轮1、轮4 具有相同的转速,轮2、轮3 具有相同的转速。
当系统作纯转动运动时,vx= vy= 0,此时有:
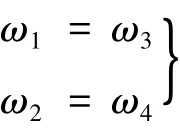
即轮1、轮3 具有相同的转速,轮2、轮4 具有相同的转速。
当系统作纯平动且运动方向为XOY 坐标系的X 轴方向时,vy= 0,ω0= 0,此时有:

即四个轮子具有相同的转速。
2 步进电动机驱动系统动力特性
步进电动机是一种由数字脉冲信号控制的电机,它不仅可以通过控制脉冲的频率来实现速度控制,也可以通过控制脉冲的个数来实现位置控制[5]。以步进电动机作为Mecanum 轮全向装备运输车的驱动电机,可以很方便地在开环状态下实现车体的速度和位置伺服双重控制。这相比与采用其他电机实现相同控制功能的闭环系统,大大降低了控制电路的复杂程度,提高了系统的可靠性。
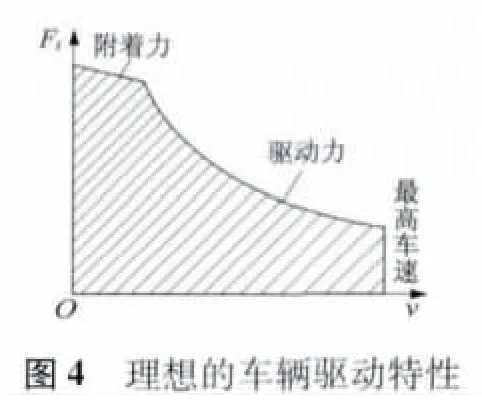
在电动车的设计与研究中,一个很关键的方面就是电机驱动系统的动力特性研究。这方面的研究不仅要从车辆整体的角度考虑其行驶时所需的驱动特性;还需要从驱动电机的角度考虑电机本身所能提供的驱动特性[6]。图4 示出了一种理想的车辆驱动特性,其中Ft为驱动力,v 为车辆移动速度。从动力特性要求来看,最佳的动力传动系设计应为在驱动轮处获得图4 的理想驱动特性。因此使驱动电机的驱动特性与车辆所需的驱动特性实现合理的匹配是十分必要的。
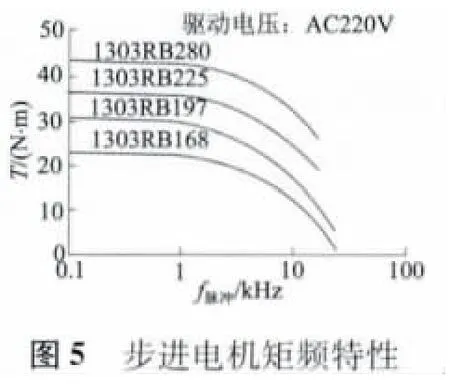
步进电动机的输出转矩会随着转速的升高而下降,且转速越高下降速率越快,步进电动机的这一固有特性称为矩频特性。在对应用于全向装备运输车的步进电动机进行选型时,要充分考虑其矩频特性与整车需求的驱动特性之间的匹配关系,以保证在正常行驶的情况下,电机驱动系统所能提供的驱动转矩大于车辆所需的驱动转矩。某130RB 系列三相混合式步进电动机的矩频特性曲线如图5 所示。
3 全向装备运输车的软硬件设计
全向装备运输车可由遥控器操作、电动机驱动,在不同方向上做水平变速运动,车上的电动液压升降系统可托举重物作升降运动,并可根据承载物体选择工装托架。其硬件结构如图6 所示。
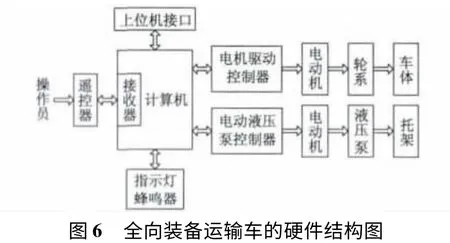
车辆的驱动系统由4 台48 V 步进电动机经减速机、离合器驱动车轮,车辆可实现前后、左右直线运行和逆时针、顺时针旋转运行。直线运行设有低速点动、低速连续、中速和高速4 种,旋转运行设有低速点动、低速连续两种。离合器可在必要时断开传动系统。
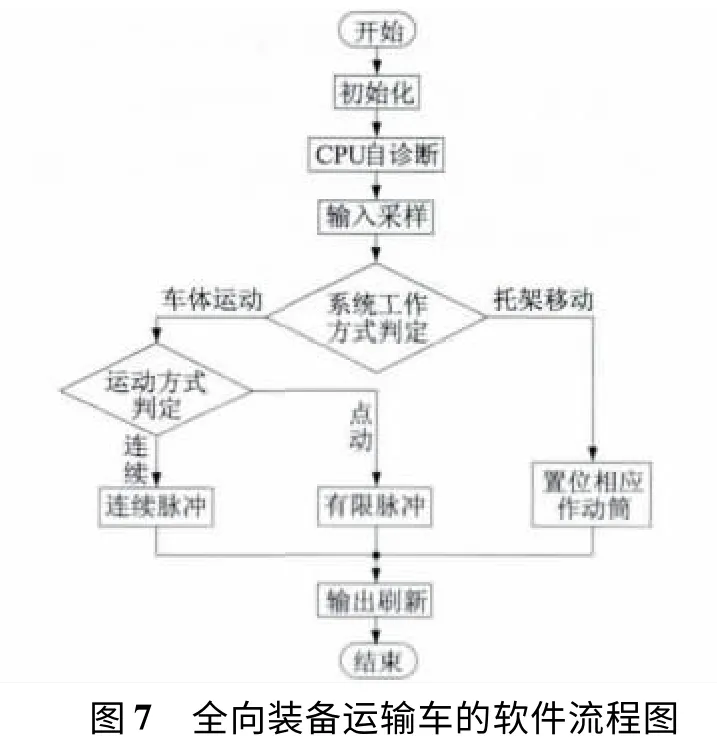
车辆的液压系统由1 台48 V、1 kW 直流电动机驱动液压泵;液压可驱动托架升降、平移和姿态调整。车辆的控制由PLC 可编程序控制器实现,其软件流程图如图7 所示。
4 样车实现
图8 为依据上述原理研制的全向装备运输车样车。该样车自重1.5 T,最大载重1.5 T,可由遥控器操作、电动机驱动,实现低速、中速、高速连续运行和低速点动运行。在低速点动工作状态时,每次移动距离不大于10 mm;在连续运行工作状态时,最高行驶速度可达2.5 km/h。该车不仅能够实现前后运动,而且能够实现左右平移和原地旋转运动,运动灵活性高,运行平稳可靠,能够很好地适应狭小工作空间内的作业任务,达到了设计的技术指标要求。

5 结 语
全向车辆灵活的运动性能是传统的轮式车辆无法比拟的。依据Mecanum 四轮系统的运动学原理,以步进电动机作为驱动电机而研制的全向装备运输车非常适合于运转空间有限、作业通道狭窄、姿态调整频繁的工作环境。它的成功研制对提高装备的运输保障效率、增加作业空间的利用率以及降低人力成本具有明显的效果,完全可以进行推广使用,替代目前运转效率较低的轮式运输设备。
[1] 侯彬,李亚明.麦克纳姆轮技术及其在船用轮式设备中的应用[J].船舶工程,2011,33(3):84-87.
[2] 刘洲,吴洪涛.Mecanum 四轮全方位移动机构运动分析与仿真[J].中国制造业信息化,2011,40(5):43-46.
[3] Gfrerrer A.Geometry and kinematics of the mecanum wheel[J].Computer Aided Geometric Design,2008,25:784-791.
[4] 杨世强,傅卫平,张鹏飞.四轮全方位轮式移动机器人的运动学模型研究[J].机械科学与技术,2009,28(3):412 -415,420.
[5] 张海英,胡金高.步进电动机运行曲线的优化算法与仿真[J].微特电机,2010,38(11):16-19.
[6] 何洪文,余晓江.电动汽车电机驱动系统动力特性分析[J].电机工程学报,2006,26(6):136-140.
