新型Anti-W indup PI 控制器在感应电机DTC 系统中的应用
2013-11-22苗敬利李启蒙
苗敬利,李启蒙
(河北工程大学,河北邯郸056038)
0 引 言
直接转矩控制(以下简称DTC)技术[1-4]是一种高性能的现代交流调速技术,它的出现稍晚于矢量控制技术。但相比于矢量控制,DTC 技术控制量明确、控制手段直接、控制方法简单,而且,直接转矩控制内部没有电流环,可以不受电流调节器带宽的限制,因此相对于矢量控制,转矩动态响应快,对电机参数的变化不敏感,鲁棒性强。但是典型的感应电机DTC 系统的转速控制器一般都采用PI 控制器,控制器的输入为给定转速和实际转速的差值,输出为转矩的给定值。由此可见,转速控制器的性能在很大程度上影响着DTC 系统的控制性能。
实际的感应电机调速系统,受到实际硬件设备的限制,电机的实际转矩是有上限值的,不能无限制增大。而常规PI 控制器并不考虑实际转矩的上限值限定,当转速发生突变时,PI 调节器会输出一个很大的转矩,但实际的电机是无法输出这么大的一个转矩的,此时电机只能输出本身所能输出的最大转矩,这种现象就叫做积分饱和现象(Windup)。Windup 现象的出现会使得系统的闭环响应变差,例如:系统的超调量将变大、调节时间会变长,甚至会造成系统的不稳定[5-7]。
为抑制积分饱和现象,人们提出了一些抗积分饱和(Anti-Windup)方案,主要有条件积分法和反计算法。反计算法设计容易,目前在工程上常采用。但反计算法的瞬时控制性能非常依赖于反馈增益系数而不是PI 控制器的参数,而在实际应用中定量设计控制系统的性能指标是难以实现的[8]。
针对以上问题,本文为感应电机DTC 系统引入了一种新型Anti-Windup 控制器,这种控制器在PI控制器出现饱和时,可以快速地退出饱和区,从而实现了减小超调量,加快响应速度的目的。
1 新型Anti-W indup PI 控制器
在感应电机中转速和转矩的关系可由式(1)的一阶线性系统表示:

用s 函数可表示为:

式中:ω 为转子的机械角速度;J 为电动机的转动惯量;B 为粘滞摩擦系数;T*E是电机的给定转矩;TL为负载转矩;J /B 被称为机械时间常数。
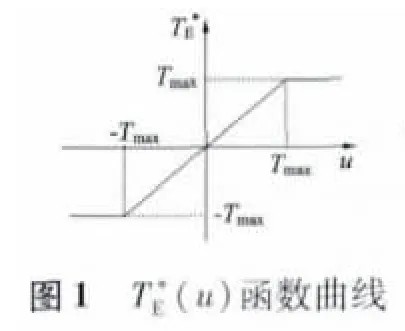
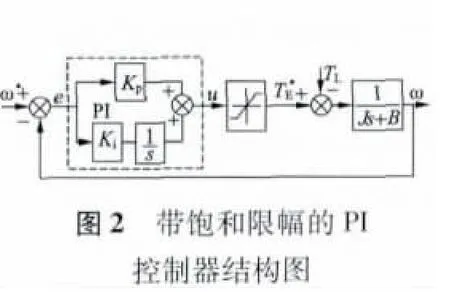
传统的PI 控制器由于其受到Windup 现象的影响,相当于在输出端加入了一个限幅函数T*E(u),式(3)是其表达式,图1 是其所对应的函数曲线。图2 为带饱和限幅的PI 控制器结构图。

式中:u 为PI 控制器的输出,sgn(u)为符号函数。
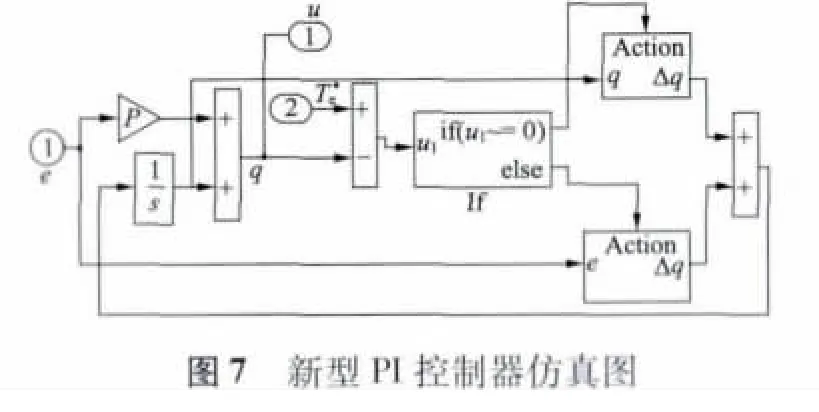
为了很好地抑制饱和现象,本文为感应电机DTC 系统引入了一种新型Anti-Windup PI 控制器,图3 给出了其控制框图。这种控制器的工作原理:先判断控制器的饱和状态,然后再根据是否饱和对积分状态i 进行两种不同的控制,当不饱和时(u =T*E),开关S1闭合,S2打开,此时控制器为典型的PI控制器;当饱和时(u >T*E),S1断开,S2闭合,把反馈的输出乘以某一负系数(-1 /k)后反馈到其输出,这样可以使积分输出快速的收敛为零。
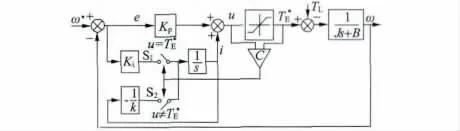
图3 新型Anti-Windup PI 控制器结构图
由图3 所示,积分状态i 的表达式:
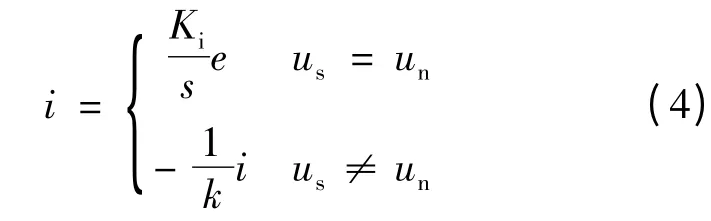
式中:Ki为积分常数;k 为积分反馈增益系数;若设km= J/B,即km为机械时间常数,那么满足k,Ki≪km。
2 新型Anti-W indup PI 控制器稳定性分析
要想系统能够稳定,则必须满足两个条件:第一系统在线性区内是趋向稳定的;第二系统能够由饱和区收敛到线性区。若两个条件同时满足,可保证系统最终趋向稳定。
2.1 在线性区渐近稳定的条件
在线性区时,新型抗饱和PI 控制器相当于是一个常规的PI 控制器,此时误差方程可写为:

定义如下李雅普诺夫函数:

式中:i0是i 的稳态值,所以有:

而在线性区总满足:
由此可以得控制器在线性区渐近稳定的条件:

2.2 系统由饱和区收敛到线性区的条件
由式(1)可知,对于给定的阶跃响应参考转速,转速误差方程:

在饱和区时由式(4)可知,积分状态i 满足如下动态方程:

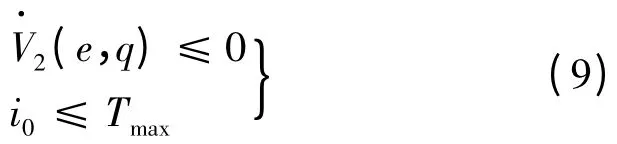
由式(4)可以看出,积分状态迅速收敛到零,而k≪km,即转速误差的动态远远慢于积分状态的动态,也就是说,积分状态i 在控制器处于饱和状态时立刻被置为零。由此可得:

设Eb= Tmax/Kp,从式(13)可看出,当| e | ≤Eb时,控制器在线性区运行,| e | >Eb时控制器在饱和区运行。
定义如下的李雅普诺夫函数:

求导有:
把式(2)和式(13)代入式(15),得

当| e | >Eb时系统能够由饱和区进入线性区,所以控制器能从饱和区到达线性区的吸引条件:

比较式(10)和式(18)可以看出,只要满足式(10)必然满足式(18),所以式(10)是新型Anti -Windup PI 控制器能够趋向于稳定的条件,即:

3 建模与仿真
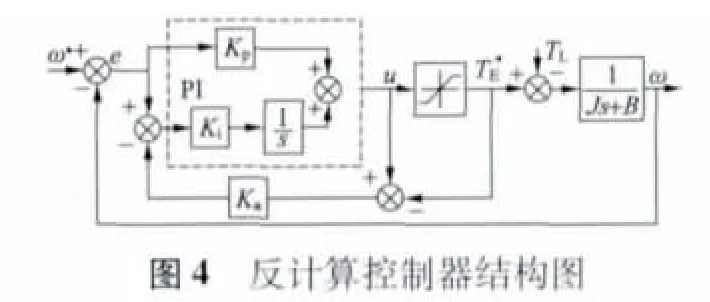
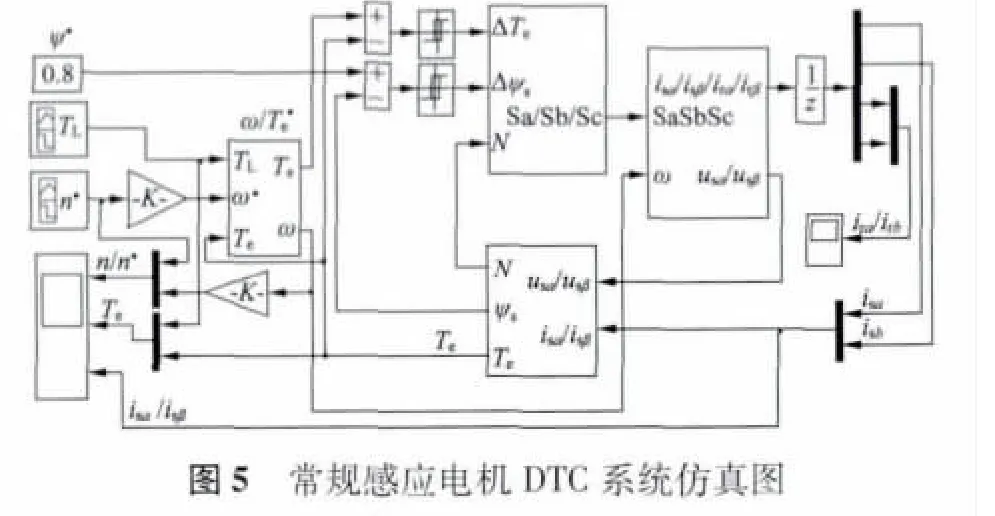
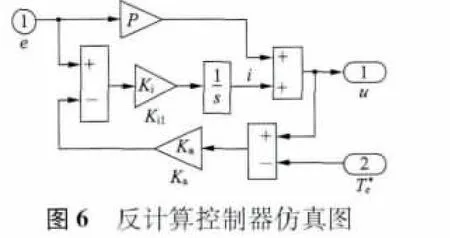
为了对新型Anti-Windup PI 控制器的性能进行参考比较,现给出了反计算控制器的结构图,图4所示。应用MATLAB /Simulink 进行建模仿真,如建立常规PI 控制器的感应电机DTC 系统的模型,如图5 所示。然后再分别建立反计算法控制器模型和新型Anti-Windup PI 控制器模型,如图6 和图7 所示。再用反计算控制器和新型Anti-Windup PI 控制器代替传统PI 控制器,得到不同的转速响应的仿真波形。
4 仿真结果
电机参数如下:定子电阻Rs= 2.5 Ω,转子电阻Rs= 2.7 Ω;定子电感Ls= 0.332 5 mH,转子电感Lr= Ls= 0.332 5 mH,互感Lm= 0.319 4 mH;电机极对数P = 2,转动惯量J = 0.008 6 kg·m2;三个控制器中的PI 参数都为Kp= 1,Ki= 10;反计算控制器中的Ka= 1,新型Anti-Windup PI 控制器中的k = 0.95;电机最大输出转矩Tmax= 10 N·m;离散采样周期50 μs;定子磁链给定值ψ*= 0.8 Wb。
感应电机空载起动,转速在0.1 s 时由0 阶跃为400 rad /s。为研究各控制器的抗负载扰动能力,在1 s 时加入4 N·m 的负载转矩。
仿真后得到如图8~图10 所示的仿真曲线,图11 是三种控制器的仿真结果,从中可以看出,转速阶跃响应的超调量和响应时间都不同,而转矩曲线几乎一致。图12 和图13 分别是图11 的局部放大图。
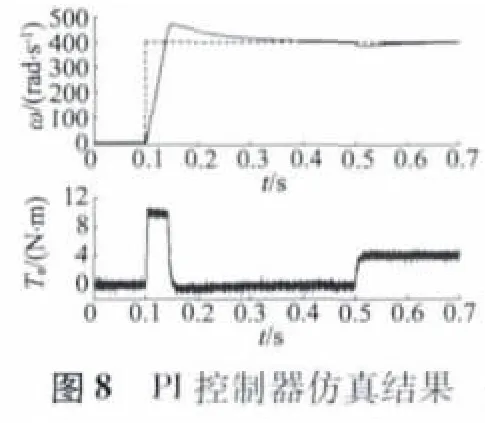
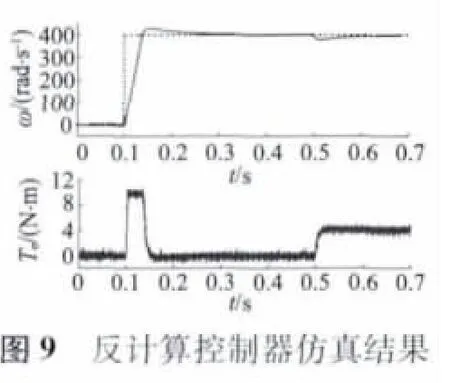
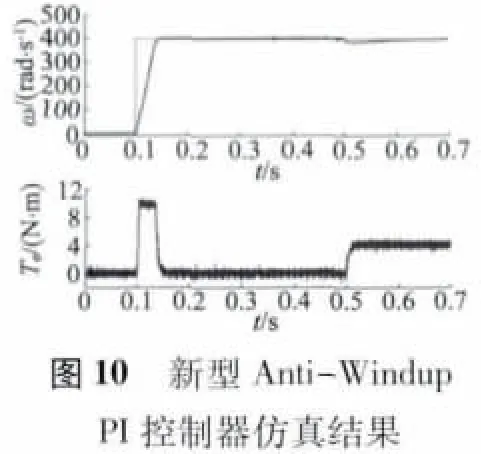
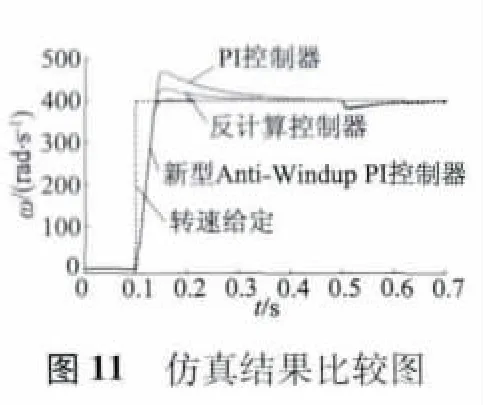
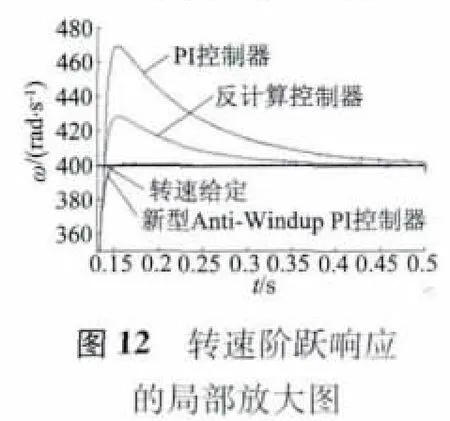
从图12 的局部放大图可以看出,当0.1 s 转速由0 阶跃为400 rad /s 时,常规PI 控制器的转速响应的超调量达到了17.5%,调节时间为0.6 s;反计算控制器的超调量为7.5%,调节时间为0.45 s;新型Anti-Windup PI 控制器几乎没有超调,而且调节时间仅有0.25 s。由仿真结果可以看出,新型Anti-Windup PI 控制器的控制性能有很明显的优势。
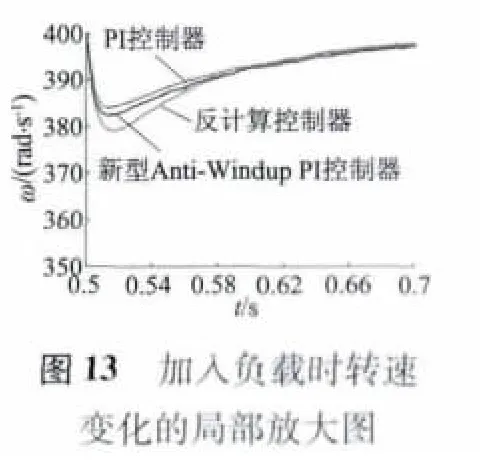
当加入4 N·m 的负载时,由图10 的局部放大图可以看出,三条曲线很接近,常规PI 控制器和新型Anti-Windup PI 控制器的对应曲线几乎重合,只有反计算控制器的对应曲线的波动稍微大一点,所以常规PI 控制器和新型Anti-Windup PI 控制器的抗负载扰动能力比反计算控制器稍好,但差别不大。
5 结 语
由于常规感应电机DTC 系统的转速PI 控制器存在着积分饱和的问题,所以本文采用了一种新型Anti-Windup PI 控制器,并给出了系统稳定收敛的条件,最后用MATLAB 对系统进行了建模和仿真,仿真结果表明,新型Anti-Windup PI 控制器能够减小甚至消除转速响应的超调量,并且缩短了调节时间。同时该控制器还具有结构简单和易于工程实现的优点。
[1] Takahashi I,Naguchi T.A New Quick-response and Hing-efficiency Control Strategy of an Induction Motor[J].IEEE Transaction on Induction Applications(S0093-9994),1986,22(5):820-827.
[2] 陈伯时,陈敏逊.交流调速系统[M].北京:机械工业出版社,2006.
[3] Trzynadlowski A M.异步电机的控制[M].李鹤轩译.北京:机械工业出版社,2003.
[4] 薛定宇,陈阳泉.基于Matlab/Simulink 的系统仿真技术与应用[M].北京:清华大学出版社,2002.
[5] 王焕钢,徐文立,黎坚,等.一种新型的感应电动机直接转矩控制[J],中国电机工程学报,2004,24(1):108-111.
[6] 杨明,徐殿国,贵献国.控制系统的Anti-Windup 设计综述[J],电机与控制学报,2006,10(6):622-626.
[7] 周华伟,温旭辉,赵峰,等.一种具有预测功能的抗积分饱和PI 速度控制器[J],电机与控制学报,2012,16(3):15-21.
[8] 于艳君,柴凤,高宏伟,等.基于Anti-Windup 控制器的永磁同步电机控制系统设计[J],电工技术学报,2009,24(4):66 -70.
