飞行模拟机仿真地平仪的设计
2013-11-22肖志坚
肖志坚
(中国民航飞行学院 模拟中心,广汉618307)
0 引 言
空客A320 飞行模拟机是在地面进行空中飞行驾驶和训练的必不可少的设备,它是对真飞机驾驶舱一比一的仿真,而地平仪是飞行员在空中判断飞机飞行姿态不可缺少的仪表[1-2],目前大多数飞行模拟机上使用的地平仪都是采用真飞机仪表,不仅价格昂贵,也不利于维修[3-6]。为此,设计一种模拟机上使用的仿真地平仪有着重要的意义。系统采用数字信号处理器和高性能微型步进电动机来实现当飞机俯仰和倾斜时地平仪的姿态控制,并利用闭环控制和电机升降频技术来实现高精度的姿态显示。
1 设计方案
1.1 步进电动机闭环控制
当飞机飞行姿态改变时,地平仪会随着飞行姿态变化自动调整其位置显示,因此,它需要响应速度快、精度高的电机来实现该功能。经分析,VID29 -05 高性能微型步进电动机不仅能将电脉冲输入信号转换成角位移或线位移加以输出,且能驱动离散型的自动执行元件,并具有较高的定位精度,能够满足仿真需要。因此,本文采用高性能微型步进电动机作为驱动部件。
因仿真地平仪需要实现高精度的位置控制,系统采用步进电动机闭环控制。闭环系统框图如图1所示,地平仪采用光电编码器作为位置检测元件,该闭环控制系统由步进电动机、驱动器和光电编码器构成。光电编码器与步进电动机主轴直接相连来检测位置,当步进电动机每运动一步,光电编码器就能给出一个或多个脉冲,通过脉冲负反馈来响应电动机的位移。
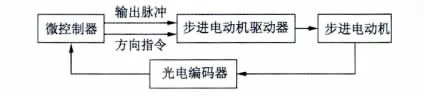
图1 地平仪步进电动机闭环系统框图
1.2 步进电动机升降频控制
步进电动机升降频控制的核心是实现电机快速、准确的定位,通常来讲就是在电机不发生失步、过冲和震动等现象的情况下,以最快的速度运行到指定的位置[7]。
飞行模拟机地平仪要求在飞机飞行姿态改变时,地平仪指示器应迅速与飞行姿态保持一致,因此要求步进电动机在最短时间内精确到达指定位置。考虑到步进电动机起动时,其静态惯量比较大,应以较小的加速度升频;而当步进电动机停止时,其输出转矩已大幅减小,此时也需要较小加速度,否则就容易发生过冲。
综上考虑,为了确保步进电动机在加速曲线的起始和结束阶段保持低速运行,保证电机的准确起停,因此决定采用分段升降频方案,如图2 所示,即在开始(t0~t1)和结束(t2之后)阶段采用抛物线升降频方案,在中间阶段(t1~t2)采用直线升降频方案。
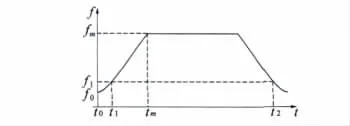
图2 步进电动机升降频示意图
开始阶段升频方程:

中间阶段直线升降频方程:

结束阶段降频方程为:

式中:f 为运行频率,f0为初始频率,t0为初始时间,b是抛物线升频加速度,a 为直线升频加速度,c 为常数,f2为抛物线降频突变频率。
2 仿真地平仪硬件设计
由于地平仪具有俯仰角、倾斜角、侧滑角和故障指示等多项功能,因此,仿真地平仪的核心控制元件采用能完成复杂控制的dsPIC30F4011 数字信号处理器。
仿真地平仪工作原理框图如图3 所示。飞行控制主计算机与数字信号处理器之间的通信采用RS-232 串行通讯方式。当地平仪上电后,数字信号处理器进行自检,完成后,步进电动机回到零点位。当飞机飞行姿态变化时,飞行控制主计算机发出的实时数据传输到dsPIC30F4022 处理器,控制器根据该数据信号控制步进电动机转动,步进电动机驱动减速器,再带动俯仰或倾斜指针转动,实现高精度的位置控制,达到俯仰角和倾斜角的精确指示。侧滑角是信号通过模数转换,再经过放大器,来驱动侧滑角指针,实现该功能。当接收到主计算机的故障信号时,数字信号处理器驱动直流电机,在仪表盘中显示弹出故障旗,当故障消失后,数字信号处理器再驱动电机将故障旗收回。
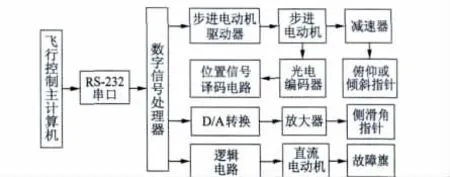
图3 仿真地平仪工作原理框图
3 软件设计
飞行模拟机仿真地平仪软件设计,主要是针对dsPIC30F4011 数字信号处理器的软件设计和开发。固件代码基于Microchip 公司的MPLAB IDE V8.80集成开发环境,利用C 语言编写程序,使用C32 编译器编译,并采用模块化的设计思想设计软件。仿真地平仪控制软件流程图如图4 所示,软件设计主要包括五大模块:主程序模块、俯仰角控制程序模块、倾斜角控制程序模块、侧滑角控制程序模块和故障旗控制程序模块。
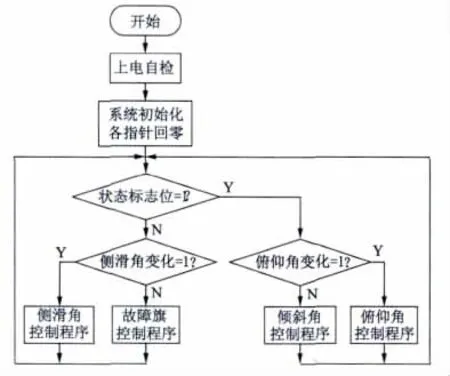
图4 仿真地平仪控制软件流程图
当仿真地平仪上电工作时,先进行系统自检,并对系统各变量、寄存器初始化,各指针回零,判断状态标志位是否等于1,如果为1,对姿态的变化进行判断,运行俯仰角或倾斜角控制程序模块,如果不为1,再对侧滑角或故障旗进行判断,运行侧滑角或故障旗控制程序,整个程序运行时通过中断函数来实现子程序的跳转、接收和发送命令。
4 测试结果
将仿真地平仪安装到空客A320 全动飞行模拟机上进行了长期的飞行训练,并通过3 000 多小时的模拟机飞行测试。测试结果表明,该仿真地平仪完全满足飞行模拟机使用的设计要求,成功替换现有模拟机用真飞机地平仪,且具有以下特点:①采用dsPIC30F4011 数字信号处理器,处理速度快,地平仪的响应速度同样也快;②相对于价格高昂的进口地平仪,仿真地平仪结构简单、成本低廉;③高性能微型步进电动机的闭环控制和分段升降频的设计方案,使得仿真地平仪精度更高;④长期运行测试证明可靠性高,故障率低。
5 结 语
针对目前空客A320 飞行模拟机上使用的真飞机地平仪存在价格昂贵、不易维修等特点,设计了一种仿真地平仪。dsPIC30F4011 数字信号处理器与高性能步进电动机闭环控制相结合的分段升降频设计方案使得该仿真地平仪响应速度快、故障率低。对该地平仪硬件设计、软件设计做了全面介绍,且试验效果符合预期。仿真地平仪价格低廉、响应速度快、可靠性高,填补了国内仿真地平仪研制的空白。它不仅可替代国外模拟机用真飞机地平仪,也可以用在国内生产的模拟机上,具有较好的应用前景。
[1] 王行仁.飞行实时仿真系统及技术[M].北京:北京航空航天大学出版社,1998:8-20.
[2] 陈又军.现代飞行模拟机技术发展概述[J].中国民航飞行学院学报,2011,22(2):25-27.
[3] 刘丹.飞行模拟器航空地平仪控制系统的研究与设计[D].青岛大学,2005,1-8.
[4] 徐强,顾宏斌,高振兴.飞行模拟器座舱仪表通信技术研究[J].信息技术,2012(1):1-3.
[5] 刘国庆,李哲煜.某型飞机模拟训练器虚拟仪表系统的研究[J].微计算机信息,2010,26(6-1):110-111.
[6] 刘红.飞行模拟器中仪表仿真系统改装方案设计[J].重庆工学院学报(自然科学版),2007,21(4):76-78.
[7] 刘颖,王志刚,王红,等.步进电机升降频的优化算法[J].微电机,2009,43(8):93-94.
