五自由度磁悬浮开关磁阻电机系统的设计与实现
2013-11-22赵旭升
赵旭升
(南京化工职业技术学院,江苏南京210048)
0 引 言
开关磁阻电机是从上世纪70 年代发展起来的一种新型电机,其独特的定、转子双凸极结构,使其具有结构简单、维护方便的结构特点,利用定转子极数不等,磁阻转矩驱动电机旋转,同时,定子上不增加励磁绕组,就可实现发电运行[1-2]。正是诸如上述众多优点,多国科技工作者的高度关注,并对其进行了较为深入的研究[3-5]。高速电机以其体积小、重量轻、功率密度高,在高速场合的应用越来越广泛。但转速提升,加剧了转轴与轴承的摩擦,轴承使用寿命下降,系统的可靠性降低[6]。研究人员提出了利用磁轴承取代机械轴承,提升系统可靠性的替代方案[7]。永磁偏置磁轴承具有功耗低、电磁铁匝数少、轴承体积小等优点,在高速、低功耗领域有着广泛的应用前景[8],将二者结合起来,是高速磁悬浮系统的一个重要研究方向。文献[7]中,美国Honeywell 公司和Revolve 磁轴承公司成功研制了功率为250 kW、转速为42 000 r/min 的五自由度磁悬浮开关磁阻电机起动/发电系统,其径向四自由度悬浮由两个永磁偏置径向磁轴承来实现,轴向悬浮则利用一个主动轴向磁轴承来实现。在此基础上,本文提出了一种新结构的五自由度磁悬浮开关磁阻电机系统,其利用永磁偏置磁轴承作支撑轴承,结构紧凑、控制方便,在高速起动/发电系统中具有广泛的应用前景。
1 磁悬浮开关磁阻电机系统结构选择
1.1 系统结构选择
图1(a)为传统结构的五自由度磁悬浮电机,其轴向自由度可单独控制,但这种分散结构占据了较长的轴向长度,使转子的临界转速降低。图1(b)是利用一个永磁偏置轴向径向磁轴承与一个永磁偏置径向磁轴承构成的五自由度磁悬浮系统,相比于图1(a)结构,虽然轴向不能独立控制,但结构紧凑,临界转速高。图1(c)结构的五自由度悬浮则是利用相同的两个永磁偏置轴向径向磁轴承来实现,相比于图1(a),结构简单紧凑,轴向长度短。在此,对图1(b)、1(c)这两种结构进行比较选择。
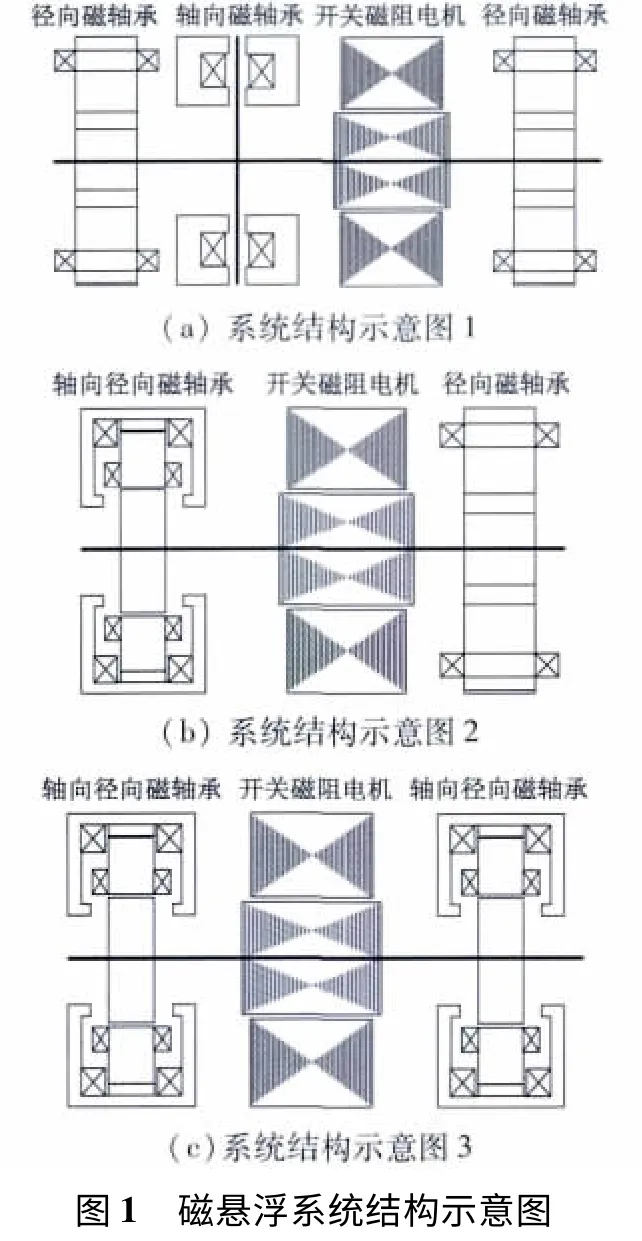
1.2 磁轴承的结构选择
针对图1(b)、1(c)结构,需选择相应结构的永磁偏置磁轴承。虽然,永磁偏置轴向径向磁轴承结构和内部磁场相比于永磁偏置径向磁轴承要更复杂,但其结构紧凑。为了简化整个电机系统的设计,增加磁轴承的互换性,选择图1(c)作为构建磁悬浮开关磁阻电机的结构方案。在此选择的永磁偏置轴向径向磁轴承的结构示意图如图2 所示,其结构和工作原理在文献[8]中已有较为详细的分析,其结构紧凑,轴向控制磁通与径向控制磁通彼此解耦,受到国内外众多研究人员的青睐。利用该种轴承构建的电机结构如图3 所示。


2 电机系统的参数设计
2.1 开关磁阻电机本体设计
在此所选用的开关磁阻电机为6 /4 结构,功率3.5 kW,设计转速60 000 r/min,电机的部分参数如表1 所示。
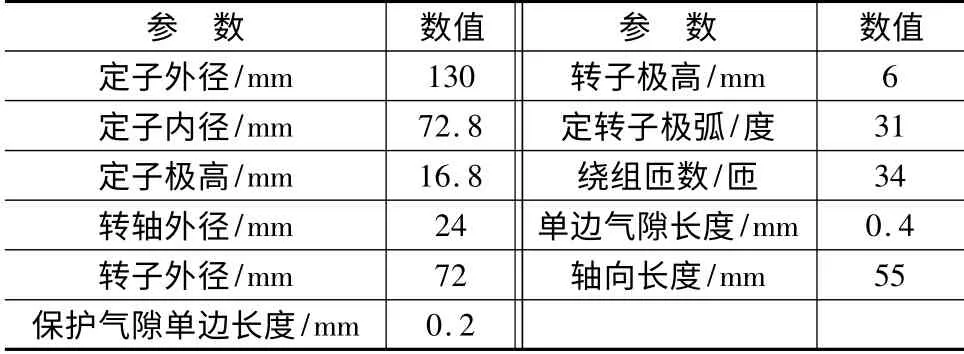
表1 开关磁阻电机部分参数
2.2 永磁偏置轴向径向磁轴承本体设计
考虑到高速时转子所产生的不平衡扰动力及转子重量,设定径向承载力500 N,约为转子重量的10倍。以文献[10-11]中永磁偏置磁轴承的参数设计方法为基础,对所选用永磁偏置轴向径向磁轴承进行了参数设计,表2 给出了永磁偏置轴向径向磁轴承的设计结果。

表2 永磁偏置轴向径向磁轴承设计结果
图4 给出了永磁偏置轴向径向磁轴承的三维仿真结果图,在加径向激励电流为166 A、轴向激励为160 A 时,径向承载力为496 N,轴向承载力为983 N,符合设计要求。
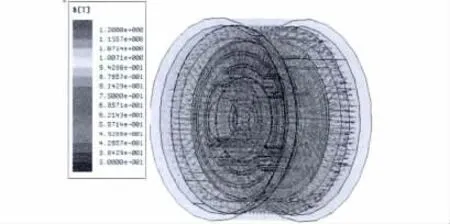
图4 永磁偏置轴向径向磁轴承三维仿真图
3 系统实验平台的制作
为了减少磁场间的相互干扰,转轴采用非导磁高强度不锈钢制成,端盖、机壳均采用非导磁材料铝合金制成,转轴总长372 mm,重约5 kg(包含转轴、磁悬浮转子及电机转子的重量),保护气隙(单边)为0.25 mm。径向定子实物图如图5(a)所示,轴向定子实物图如图5(b)所示,考虑到安装的问题,靠近开关磁阻电机的内轴向定子设计成哈佛结构,图6 给出了实验样机全景图。


4 实验验证
4.1 静态悬浮实验
对五自由度磁悬浮开关磁阻电机系统进行了静态起浮实验验证,起浮时为空载,各自由度PID 参数调节的基本相同。由于两端永磁偏置轴向径向磁轴承完全相同,图7 给出了起浮时一端轴向径向转子位移的变化、控制电流的变化以及起浮时间的实验波形。从图中可见,轴向、径向三个自由度的起浮时间均在30~40 ms 之间,两个径向自由度的起浮电流约在3 A 左右,轴向起浮电流接近于2 A,小于径向自由度,这是由于两端轴向绕组为并联控制所致。

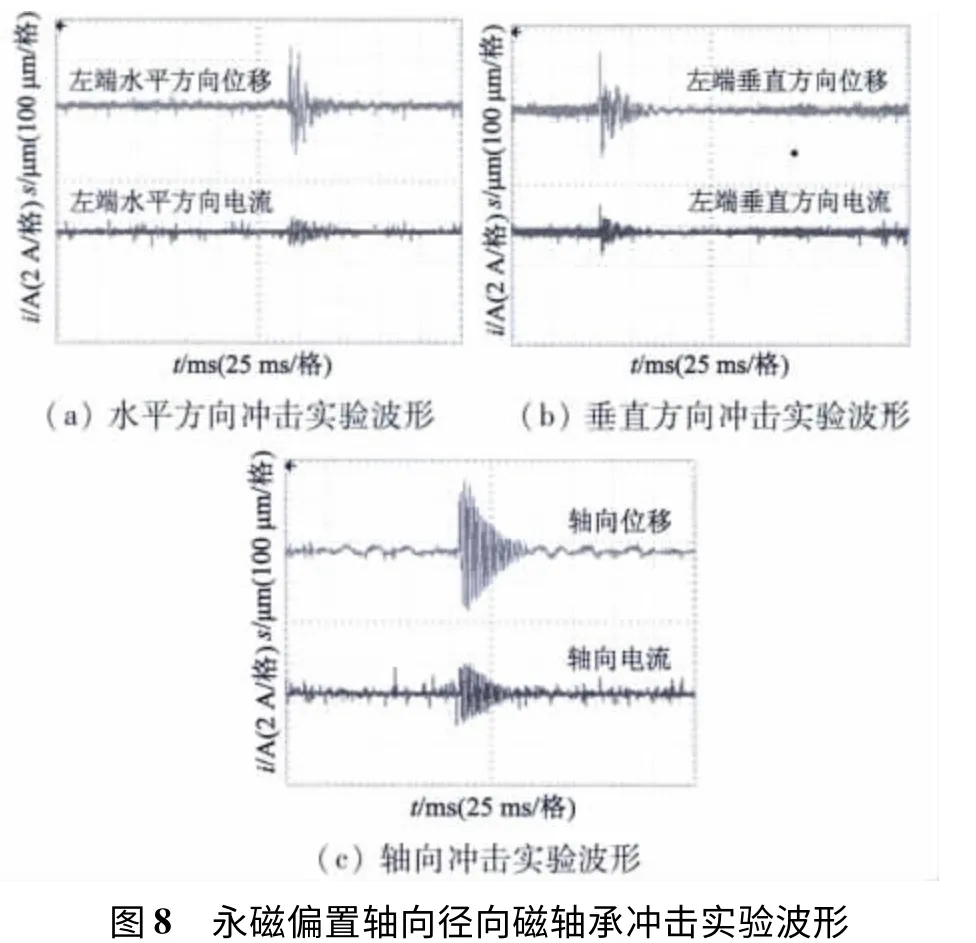
图8 给出了木榔头敲击转轴的冲击实验波形,在50 ms 时间内,各自由度迅速恢复稳定悬浮。对其最大承载力进行了测定,在最大电流2 A 时,承载力为475 N,符合设计要求。
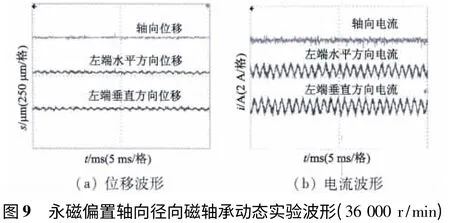
4.2 动态悬浮实验
利用高速开关磁阻电机驱动,实现了转子0~36 000 r/min 的动态悬浮。图9 给出了36 000 r/min 时的实验波形,从实验结果来看,各自由度位移振动幅度都小于保护气隙,径向约为60 μm,轴向约为20 μm,控制电流的峰-峰值则是径向约为2 A,轴向约为0.5 A。
静动态实验结果表明,该系统利用开关磁阻电机作为驱动电机,利用永磁偏置轴向径向磁轴承作支撑轴承,实现了转轴的0~36000 r/min 的稳定悬浮,系统结构选择合理,参数设计合理准确。
5 结 语
本文提出并制作了利用永磁偏置轴向径向磁轴承作为支撑轴承、开关磁阻电机作驱动的五自由度磁悬浮电机系统。由于采用两个相同的永磁偏置轴承作为支撑轴承,简化了系统结构,增加了磁轴承的互换性,简化了参数设计及加工难度。对电机系统进行了动静态悬浮实验,实现了转轴0~36 000 r /min的稳定悬浮,结果验证了五自由度悬浮系统结构选择及参数设计的合理性。该系统在高速开关磁阻电机起动/发电系统中具有广泛的应用前景。
[1] 刘迪吉,张焕春,傅丰礼,等.开关磁阻调速电动机[M].北京:机械工业出版社,1994.
[2] 王宏华.开关磁阻电动机调速控制技术[M].北京:机械工业出版社,1995.
[3] Schofield N,Long S.Generator operation of a switched reluctance starter/generator at extended speeds[J].IEEE Trans.Veh.Technol.,2009,58(1):48-56.
[4] Cardenas R,Pena R,Perez M,et al.Control of a switched reluctance generator for variable-speed wind energy applications[J].IEEE Trans.Energy Convers.,2005,20(4):781-791.
[5] Kioskeridis I,Mademlis C.Optimal efficiency control of switched reluctance generators[J].IEEE Trans.Power Electron.,2006,21(4):1062-1072.
[6] 虞烈.可控磁悬浮转子系统[M].北京:科学出版社,2003.
[7] Potgieter C,Hope W,Gregory E.Magnetic bearing controls for a high speed,high power switched reluctance machine (SRM)starter /generator[C]/ /Proceedings of the SAE Power Systems Conference.USA,2000.
[8] 赵旭升,邓智泉,梅磊,等.永磁偏置磁轴承的研究现状及其发展[J].电工技术学报,2009,24(9):9-20.
[9] 赵旭升,邓智泉,汪波.永磁偏置径向磁轴承的原理分析与参数设计[J].电工技术学报,2011,26(11):127-134.
[10] 赵旭升,邓智泉.永磁偏置轴向磁轴承的磁悬浮机理与有限分析[J].微特电机,2011,39(9):1-6.
[11] 赵旭升,邓智泉,汪波.异极性永磁偏置径向磁轴承的参数设计与实现[J].电工技术学报,2012,27(7):131-138.
