直升机引导条件下舰载反舰导弹超视距攻击仿真
2013-11-09徐清华夏青峰张贵银李中良
徐清华,夏青峰,张贵银,李中良
(1.海军兵种指挥学院,广东 广州 510430;2.海军装备研究院,北京 100161)
直升机引导条件下舰载反舰导弹超视距攻击仿真,研究了舰载反舰导弹攻击目标过程中,由直升机引导平台、舰艇发射平台、导弹自控自导飞行、被攻击目标和战场环境共同影响作用下导弹对目标攻击产生的射击影响,并通过仿真实验的方法判断导弹攻击目标过程中能否命中目标。
1 直升机引导条件下的导弹超视距攻击误差分析
影响导弹超视距攻击误差的因素非常多,在研究问题的时候不可能把所有影响因素都考虑进去,而应考虑影响导弹攻击效果的主要因素。按平台可将误差划分为直升机引导误差、舰艇发射误差、目标机动误差和导弹飞行误差。
1.1 直升机引导误差[1]
直升机引导误差是指直升机探测到的目标位置与目标实际位置产生的偏差,引起误差的因素主要有:
1)直升机雷达探测目标方位、距离误差。目标方位、距离数据是通过直升机雷达测得的,由于雷达测得的数据存在误差,从而影响目标的定位精度。
2)直升机自身位置误差。直升机的地理坐标分别由相应导航系统提供,而导航系统误差导致直升机地理坐标出现误差,该数据的精度取决于导航系统的精度。
3)直升机自身高度误差。直升机自身高度通常采用测高仪测量,测高仪一般分为气压测高仪和无线电测高仪,其测量误差不同,高度的误差影响目标定位精度。
4)直升机罗经指北误差。直升机雷达对目标进行测向时的精度与直升机罗经的罗经指北误差有关,修正了罗经差以后的罗经指北误差是随机误差。
1.2 舰艇发射误差
舰艇发射误差是指舰艇在发射导弹时候的发射位置和发射方位偏差,引起误差的因素主要有:
1)舰艇自身定位误差。导弹发射舰艇的地理坐标分别由相应导航系统提供,导航系统误差导致舰艇地理坐标的误差,其精度取决于导航系统的精度。
2)舰艇罗经指北误差。舰艇罗经指北误差是指目标相对于发射平台方位产生的误差。修正了罗经差以后的罗经指北误差是随机误差。
1.3 目标机动误差
目标机动误差是指导弹发射后,导弹在到达自控终点之前的飞行过程中因目标机动产生的射击误差。由于目标机动产生导弹射击误差随着时间的增加逐渐累积,因此随着导弹射程的增加,目标的有利机动对导弹射击误差影响越大。目标机动误差产生的以下影响:1)目标垂直于导弹来袭方向机动影响导弹的横向捕捉概率,也是影响导弹捕捉概率的主要因素;2)目标平行于导弹来袭方向机动影响导弹的纵向捕捉概率,可以通过导弹末制导提前开机的方法消除目标机动引起的纵向捕捉概率,因此一般情况不予考虑。
1.4 导弹飞行误差
导弹飞行误差是指导弹发射后在飞行过程中产生的自控飞行误差和自导飞行误差。
导弹自控飞行误差是指导弹实际开锁点相对理论开锁点(散布中心)产生的随机误差,包括侧向散布和纵向散布,服从二维正态分布。它主要取决于导弹的发射条件、火控系统精度和导弹的自控飞行精度等因素。主要影响因素有:1)航向陀螺漂移误差,随射击距离增加而增加;2)自动驾驶仪航向控制误差,随射击距离增加而增加;3)扇面角装订与航向陀螺支架误差,随射击距离增加而增加;4)弹体结构误差引发的导弹航迹误差,随射击距离增加而增加;5)随机风(阵风)引起的侧向误差,随射击距离增加而增加;6)导弹飞行速度误差引起自控终点散布误差,随飞行时间增加而增加。
导弹自导飞行误差是指导弹末制导阶段雷达开机发现并跟踪目标后自导飞行产生的误差,自导飞行误差直接影响导弹能否命中目标,主要受导弹的自导选择跟踪能力和目标特性影响。主要影响因素有:1)导弹无线电高度表测量误差,主要影响导弹对小型目标攻击效果;2)导弹转向角速度误差,主要影响导弹能否稳定跟踪目标;3)导弹对多目标的识别选择能力,主要影响导弹对指定攻击目标的选择概率。
2 直升机引导条件下舰载反舰导弹超视距攻击仿真
本文主要分析直升机引导条件下舰载反舰导弹超视距攻击仿真流程和仿真模型构建。
2.1 舰载反舰导弹超视距攻击仿真流程设计
根据舰载反舰导弹超视距攻击过程所需要获取的数据和实施过程,建立如图1所示的仿真流程图。
战场态势设置依据的是导弹超视距攻击要素生成的直升机、发射舰艇、目标三者的位置关系。通过态势设置可以设定导弹超视距攻击的各种仿真条件,从而验证不同条件下导弹超视距攻击效果。
误差参数设置是对影响导弹攻击的各种误差进行量化,量化的误差是指均方差或最大误差(3倍均方差)。在每次仿真实验中使用的误差数据并不是误差设置的均方差或最大误差,而是根据误差的分布规律产生的随机数据,在导弹超视距攻击中各种误差分布一般符合平均分布或正态分布,例如定位误差符合正态分布规律,则Δd=3δ·φ(X),其中,Δd表示产生的随机误差,δ表示该误差的均方差,φ(X)产生0-1之间的正态分布随机数。可靠的误差数据是提高导弹超视距攻击仿真度的主要因素。
仿真控制是对导弹超视距攻击过程中引导方法、射击方式、导弹发射延迟时间、目标机动策略及仿真次数的确定和仿真结果输出等。
2.2 直升机引导条件下导弹超视距攻击仿真模型构建
根据舰载直升机引导条件下的导弹超视距攻击仿真流程分析,可将其划分为两个仿真阶段。第一阶段是直升机引导定位仿真即根据直升机定位误差——直升机探测误差、发射舰艇定位误差解算目标相对于发射舰艇方位距离,从而形成导弹攻击态势,为导弹攻击过程仿真提供态势数据。第二阶段是导弹超视距攻击过程仿真,即根据发射舰艇与目标的态势,导弹发射参数、导弹自控飞行和自导飞行参数实时解算导弹与目标的空间位置关系,从而判断导弹对目标的命中结果。
2.2.1 直升机引导定位模型构建
直升机引导定位过程中,直升机、发射舰艇、目标分布在地球表面以上三维空间中,受地球曲率的影响,为了更加精确和直观地描述三者的位置关系,本文采用大地经纬度坐标系和地平面坐标系建模。假设地球是理想的克拉索夫斯基椭球体,使用大地经纬度和海拔高度来描述导弹发射舰艇、目标、直升机和导弹的空间位置和姿态[2]。直升机引导定位示意图如图 2所示。
大地经纬坐标系 原点(O):地球椭球的中心与地球质心相合,椭球的短轴与地球自转轴相合;大地纬度(ψ):过地面点的椭球法线与椭球赤道的夹角;大地经度(λ):过地面点的椭球子午面与格林尼治子午面之间夹角;大地高程(h):地面点沿椭球法线至椭球面的距离。
地平直角坐标系 原点(H):地面某点,即海平面某点,基准面XHY为H点的水平面;HX轴:指正东;HY轴:指正北;HZ轴:依右手法则垂直水平面XHY向上。
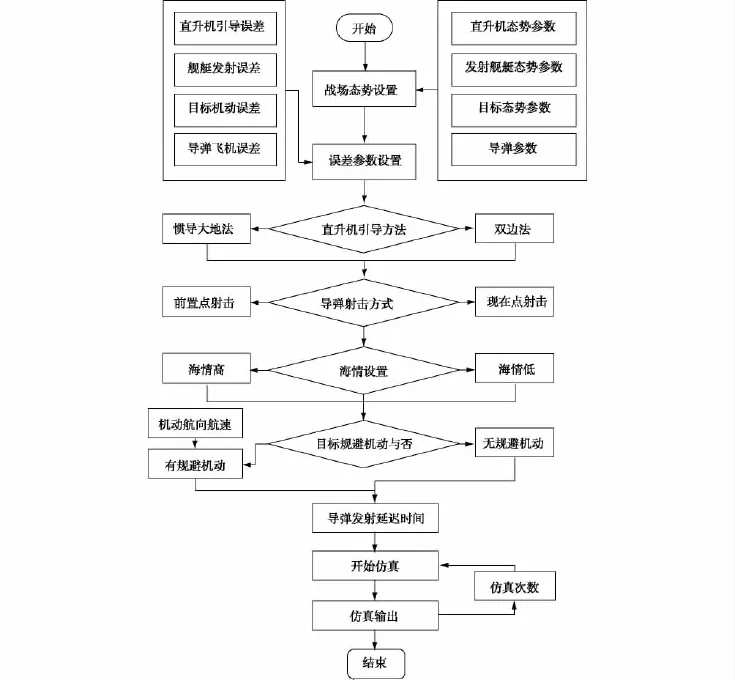
图1 导弹超视距攻击仿真流程图

图2 直升机引导定位示意图
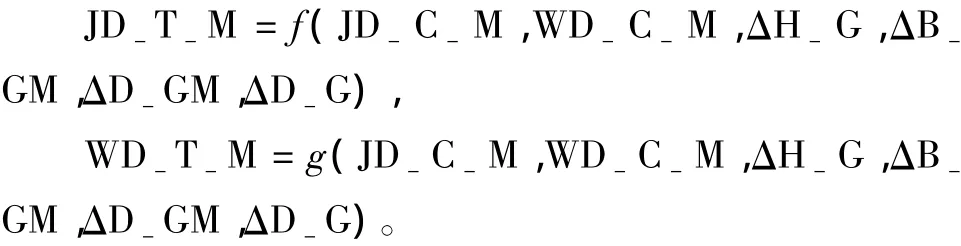
如图2所示,发射舰艇测量经纬度坐标为W(JDC-W,WD-C-W),测量航向航速为(C-C-W,V-CW),直升机探测目标时的测量经纬度坐标G(JD-CG,WD-C-G),测量高度为 TG(H-C-G),探测目标的方位距离为 GM(B-C-GM,D-C-GM),GM 在大地上的投影为TM,投影距离为STM,目标测量经纬度坐标为 M(JD-C-M,WD-C-M),目标测量航向航速为(CC-M,V-C-M),发射舰艇相对于直升机的方位距离为GW(B-C-GW,D-C-GW),GW 在大地上的投影为TW投影距离为S-TW,目标相对于发射舰方位距离WM(B-C-WM,D-C-WM),∠GMW 为 β,∠MTW 为α,∠GMW为γ。在仿真过程中,充分考虑各种平台、武器和环境误差(△)对导弹射击的影响,因此可以根据随机误差理论计算出与导弹超视距攻击相关的真值。即,真值=测量值+△。为了表达方便,测量值表达式中间的“C”改为“T”后就是真值表达式。如,发射舰艇真值经纬度坐标为(JD-T-W,WD-T-W)。直升机引导定位解算通常采用贝塞尔大地主题正算和大地主题反算的方法进行[3],由于解算过程非常复杂,受论文篇幅限制,在这就不描述详细解算过程,主要通过函数关系表示其解算过程。该模型构建目标是解算目标和发射舰艇的实际经纬度。
1)已知直升机测量经纬度、测量高度和直升机雷达探测目标的测量方位、测量距离解算目标的测量经纬度。

2)已知目标测量经纬度和直升机经纬度误差、高度误差、雷达探测方位距离误差和直升机自身定位误差解算目标真值经纬度。
3)已知发射舰艇测量经纬度、测量航向航速和舰艇定位误差、航向航速误差解算发射舰艇真值经纬度、真值航向航速。

2.2.2 舰载反舰导弹超视距攻击仿真模型构建
发射舰艇收到直升机引导定位数据后,指挥员就可以根据目标相对于发射舰艇的态势制定导弹攻击方案,并按照方案发射导弹。舰载反舰导弹一般采用自控加自导的控制体系攻击目标,所以导弹攻击过程可分为导弹发射、自控飞行、自导飞行和导弹命中目标四阶段[4-5]。模型构建的目标是实时解算导弹相对于被攻击目标的空间位置关系,最后判断导弹是否命中目标。导弹飞行弹道投影到发射舰艇与目标舰艇垂直面和投影到海平面的攻击示意图如图3所示。

图3 导弹攻击弹道示意图
设t为导弹攻击目标过程中的时间,Δt为仿真解算时间间隔,则导弹攻击目标过程中导弹实时位置姿态和目标位置姿态建模分析如下。
1)导弹发射阶段。主要根据导弹发射仰角误差、发射方位误差、发射扇面角误差,确定导弹发射时间t0和实际发射仰角、发射方位、发射扇面角。
导弹发射时经度:JD-T-D(t)=JD-T-W(t0)
导弹发射时纬度:WD-T-D(t)=WD-T-W(t0)
导弹发射仰角:A-T-D=f(A-C-D,ΔA)
导弹发射方位:C-T-D=f(C-C-D,ΔC)
导弹发射扇面角:φ-T-D=f(φ-C-D,Δφ)
2)导弹自控飞行阶段。已知导弹飞行航向、飞行速度、飞行高度、自控飞行时间和目标机动航向、航速及相关误差解算导弹实时经纬度和目标实时经纬度。
导弹飞行航向:C-T-D=(C-C-D,ΔC-D)
导弹飞行速度:V-T-D=(V-C-D,ΔV-D)
导弹飞行高度:H-T-D=(H-C-D,ΔH-D)

3)导弹自导飞行阶段。自导阶段模型主要是在自控飞行模型的基础上增加了雷达自导头搜索跟踪目标模型。导弹自导飞行阶段必须满足雷达自导头可靠捕捉并跟踪目标的条件,否则导弹会继续按照自控飞行参数飞行,直至导弹最大射程终止后落水。当导弹雷达开机搜索到由多个目标组成的编队时,导弹对指定目标的捕捉跟踪能力还受导弹自导头对目标的选择能力影响,导弹对目标选择能力主要与导弹自导头对目标选择方法有关,不同类型导弹使用的选择方法往往存在差异。已知导弹经纬度、目标经纬度、导弹最大有效射击距离、雷达自导距离、雷达搜索扇面、导弹转弯角速度、导弹对指定目标的选择概率解算导弹是否发现跟踪目标,能跟踪为1,不能跟踪为0。

4)导弹命中阶段。导弹自导飞行结束后有个短暂的俯冲过程,判断导弹能否命中目标依据是导弹最后俯冲过程中能否与目标直接产生接触碰撞,即判断导弹空间位置与目标体垂直于导弹来袭方向的投影面是否相交,没有相交表示导弹脱靶,有相交表示导弹命中目标。已知导弹经纬度、目标经纬度、目标几何模型,解算导弹是否命中目标,命中为1,没命中为0。

3 算例分析
假设在某海域舰艇W在直升机G的引导下使用舰载反舰导弹D对目标进行导弹攻击,态势设置如图4所示,目标相对于发射舰艇的方位为100°,距离100km,相对于直升机方位130°,距离50km;直升机、发射舰艇、目标、导弹平台误差设置如图5所示;仿真控制设置如图6所示,直升机引导方法采用惯导大地法,射击方式采用现在点射击,目标无规避机动,海情设为低,导弹延迟发射时间为25s,仿真次数设为100次。通过舰载反舰导弹超视距攻击仿真实验平台100次仿真实验,其实验结果如表1所示。
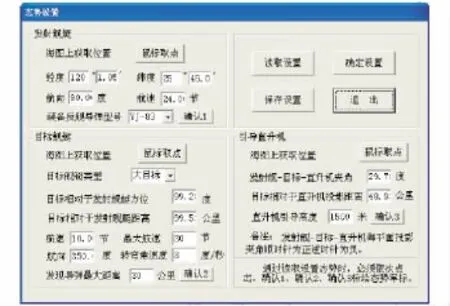
图4 导弹攻击态势设置

图5 导弹攻击误差设置

表1 导弹超视距攻击仿真实验结果

图6 导弹攻击仿真设置
通过对以上数据进行分析可知,在同等态势条件下,导弹对目标攻击产生的结果不一定相同,主要原因是:1)受各种误差影响,导弹到达自控终点雷达开机搜索时无法发现目标,既有可能目标根本就不在自导雷达搜索扇面之内,也可能是雷达自导头无法检测到目标反射回波;2)导弹发现目标后无法跟踪目标,主要受雷达自导头跟踪能力和目标特性影响;3)导弹能够自导跟踪目标,但最终无法准确命中目标,主要受目标规避机动、海况条件、小目标特性等因素影响使得导弹在最后俯冲阶段脱靶。
4 结束语
本文针对直升机引导条件下导弹对目标的超视距攻击进行了仿真分析。首先,对导弹超视距攻击进行误差分析,在此基础上进行了计算机仿真。通过具体的仿真实例发现,导弹对目标攻击结果受到误差精度、雷达跟踪性能、目标特性、海况等因素的影响。该仿真平台模拟了武器装备、战场环境、作战对手和作战行动的逼真情形,且可根据作战条件的变化生成相应的作战仿真方案,为部队训练提供了一个高效的手段。
[1] 徐清华.直升机超视距主动引导定位误差分析[J].指挥控制与仿真,2006,28(5):61-62.
[2] 黄志宇.直升机超视距主动引导定位分析[J].舰船电子工程,2007,29(1):58-59.
[3] 熊介.椭球大地测量学[M].北京:解放军出版社,1988:40-42.
[4] Deniel Kaplan,Leon Glass.Understanding Nonlinear Dynamics[M].New York:Springer- Verlag,1995:12-13.
[5] 何浩东.垂线偏差对弹道导弹命中精度影响的研究[D].西安:第二炮兵工程学院,1993:24-26.
