基于地磁场扰动探测的巡航导弹定位系统设计*
2013-10-22武锦辉闫晓燕
武锦辉,闫晓燕,王 高
(中北大学电子测试技术国家重点实验室,山西太原 030051)
0 引言
巡航导弹[1]是兼具战略、战术性的突防能力很强、破坏力极大的现代化军事武器,其作战效能在历次的局部战争中都有所体现。针对巡航导弹的发射方式、飞行轨迹等特征信息,建立一种可以有效地探测、识别、定位的导弹防御系统是现代战争发展的必由之路[2]。定位与防御的基础是准确地在尽量远的位置探测识别出巡航导弹的存在,才能提供足够的反应时间,提高导弹拦截率。
在国外,针对巡航导弹的探测方法主要有雷达探测系统[3]、红外探测系统[4]和磁力探测法[5]。雷达探测系统应用广泛,但雷达工作采用主动发射电磁波的方式,容易暴露,并且易被电磁干扰。同时,对于尺寸小、速度接近或超过音速、低空及超低空飞行的物体难以识别[6];红外探测系统采用无源红外探测器件,几乎可以对任何存在热辐射的物体进行探测,而巡航导弹尾喷口温度都高达上千度,且巡航导弹的金属外表也会产生大量的辐射,可有效地被红外无源探测设备所探测到[7]。例如:美军空军配备的机载激光TMD战术弹道导弹[8]、攻击型机动发射车的TEL红外探测系统[9]等。美国海军研制的舰载红外搜索与跟踪系统(IRST)可将导弹航迹[10]等信息传给舰载“宙斯盾”作战系统进行防御;磁力探测法是采用磁力探测仪探测导弹位置的方法,主要用于现代反潜飞机,为固定翼反潜巡逻机常用的反潜探测设备。磁力探测仪的主要结构是带导线的金属敏感元件探头,由探头将导弹把探测器位置的磁场干扰记录下来,从而定位导弹位置。这种方法的灵敏度高,虚警率低,探测效率取决于载机的宽度和工作速度。
综上所述,各种探测方法各有所长:红外探测方法对目标的依赖性小,可实现无源探测,但难准确定位,易受干扰;雷达探测方法搜索范围大,灵敏度高,但难准确定位,易受环境影响;磁力探测方法精度高、定位能力强,但探测针对性强,抗干扰能力差。由此,本文设计了一种基于磁异常探测的反巡航导弹定位系统,该系统利用磁力探测器对地磁场变化进行探测分析,从而获得由高速运行的巡航导弹产生的地磁变化。该方法利用地磁探测检测空域大,由于高速运动物体磁异常明显,所以,虚警率和灵敏度高。
1 系统设计
1.1 基本原理
根据法拉第电磁感应定律,当磁通发生变化时可以产生感应电动势,所以,被扰动的磁场可以用来求解被测物体的特征信息,对于良导性的金属而言,可以反演其位置、速度等信息。根据巡航导弹切割地球磁场磁力线的方式,其对应的感应电动势的表达式有

由此可知,可以根据铁磁性物体运动对地磁场的扰动来识别定位巡航导弹。由于地球磁场覆盖范围大、强度变化周期性好,而任何运动的铁磁介质都可以看作是多个双极性偶极子的集合模型,并且这些偶极子有固定的极化方向,从而反作用于地磁场产生扰动。当磁偶极子置于地磁场中,地磁场会扭曲和畸变,结果如图1所示。当运动的铁磁介质扰动地磁磁场时,磁传感器探测到扰动并产生变化的电压信号,该信号通过处理电路转换为数字量,最终实现探测和定位。
1.2 系统构成
由于巡航导弹表皮为金属,有良好的电磁特性,其在巡航过程中快速地切割地磁场的磁力线,从而使地磁场产生相应的扰动,由巡航导弹引起的地磁异常可以有效反映出导弹的位置、尺寸等特征信息。磁异常探测器就是通过铁磁质运动过程中引起地磁场扰动从而获取相应信息的,系统结构框图如图2所示。由此可知,探测器共分为4个模块:地磁场扰动探测部分、探测信号处理与变换部分、有效数字信号分析识别定位部分、PC机通信显示结果部分。

图1 偶极子对地磁磁场扰动示意图Fig 1 Schematic diagram of geomagnetic magnetic field disturbance by dipole
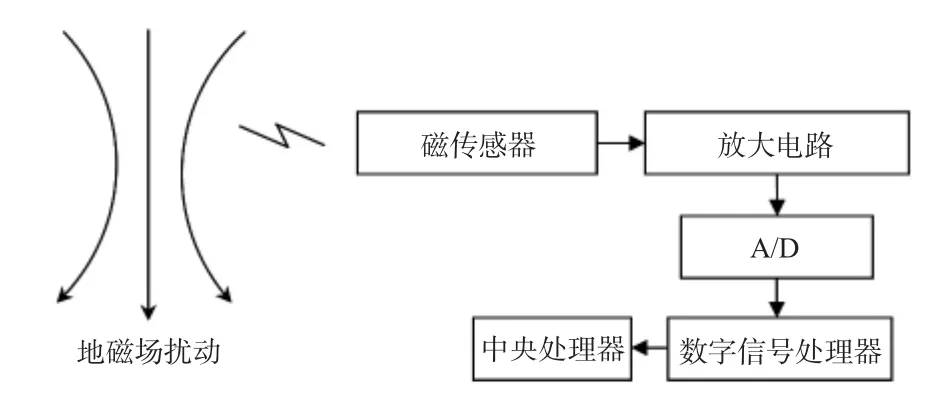
图2 地磁扰动探测系统示意图Fig 2 Schematic diagram of geomagnetic disturbance detection system
1.3 物理模型分析
通过电磁感应定律可知,在铁磁介质中产生的感应电压有

其中,v为铁磁介质的速度,B为相应位置的地磁场强度,dS为铁磁体的表面微分,dl为铁磁体的长度微分,dt为时间微分。
由感应电压得到的感应电流可以随着铁磁介质在地磁场中的运动而发生相应的变化,该变化与铁磁介质的速率、地磁场方向都有关系。感应电流产生相应的附加磁场,若P为探测器的位置,铁磁介质的长度是l,而探测器与铁磁介质的距离是R,则在载流直导体上取电流元Idl后,通过毕奥—萨伐尔定律推导,P点的磁感应强度有

由于探测位置通常与被测物距离很远,而被测铁磁介质实际尺寸为几米到几十米,所以,基本可以忽略被测介质(导弹)的尺寸造成的影响,从而化简式(3)可得

2 仿真分析
由式(4)可知,对磁扰动强度H的主要影响因素是被测铁磁介质与探测器的距离、被测铁磁介质的长度以及被测铁磁介质的速度。通过仿真分析可以获得这3个主要参数与磁扰动强度H的函数关系,从而分析通过该系统可获得的探测范围与精度。
2.1 探测距离
从仿真图3可以看出:在0~1000 m的范围内,磁扰动强度H随着r的不断增大而明显减小。当超过1 000 m以后,能量衰减就不是很明显了,其磁场扰动强度基本保持在1个数量级上。同时,这种缓慢递减是相对平稳的,所以,在采用磁扰动强度变化探测远距离的巡航导弹时,数据的稳定性较好。当然,由于距离越远磁场强度越弱,所以,需要根据探测巡航导弹的范围而选择灵敏度适合的磁探测器,即需要的探测范围越大,采用越高灵敏度的磁探测器。
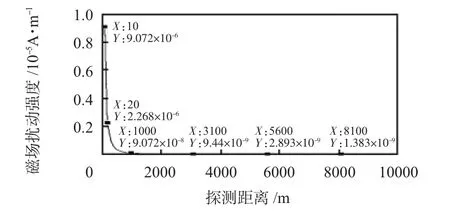
图3 探测距离r和地磁扰动强度H的函数关系Fig 3 Function relation between detection distance r and intensity of geomagnetic disturbances H
2.2 被测铁磁介质的尺寸
所描述的被测铁磁介质在本文中主要指巡航导弹,由于巡航导弹是金属表皮的,所以有良好的导电性。由图4可知,磁扰动强度H与铁磁介质的长度L为正比的线性关系,即对于型号不同的巡航导弹即使速度、距离都相同,其产生的磁扰动强度也是不同的。

图4 铁磁介质长度L和地磁扰动强度H的函数关系图Fig 4 Function relation between ferromagnetic medium length L and intensity of geomagnetic disturbances H
2.3 被测铁磁介质的速度
想要有效地拦截巡航导弹不但需要知道它的轨迹,还需要知道它的速度信息,又因为切割磁力线的速度会影响磁扰动强度的大小,所以,分析被测铁磁介质的速度对磁扰动强度的影响是必要的。如图5所示,在同一时刻不同速度下所对应的磁扰动强度H是不一样的,曲线说明速度越大磁场强度H越大,但这个过程是动态的,因为距离会越来越近,所以,这是个综合影响的过程。

图5 被测介质速度v和地磁扰动强度H的函数关系图Fig 5 Function relation between measured medium speed v and intensity of geomagnetic disturbances H
3 实验
3.1实验条件
实验采用金属圆柱体(φ10 mm×30 mm)模拟巡航导弹,通过弹射器给该金属柱一定的初速度,速度和出射角度事先可求,采用光纤磁力仪获取金属柱飞过某一区域对该区域磁场产生的扰动。其中,金属柱、给定区域磁场、探测器灵敏度按照真实巡航导弹飞过地磁场(以实验地纬度为准)的比例计算而成。
3.2 实验数据分析
实验过程采用金属圆柱体穿过磁场,再由光纤磁力仪探测磁场的扰动情况。实验固定金属柱的飞行方向,将探测器放置在距金属柱轨迹不同距离的地方进行探测,分别测试不同速度对应的磁扰动强度,从而获得被测物的相关特征信息。实验数据如表1所示。

表1 速度与距离产生的磁扰动强度H(10-9A/m)Tab 1 Intensity of magnetic disturbance H generated by speed and distance(10-9A/m)
根据表1中数据显示,随着速度的增大,磁扰动强度也随之增大,也就是速度越快越容易被磁探测器检测到。在纵向可以看到,随着距离的增大,产生的磁扰动强度也随之减小,且递减速度较大,说明探测器与被测物的距离对磁扰动强度的贡献明显。整个实验的磁扰动强度在10-8~10-10A/m量级变化,如果距离更大、或者速度更快,可以根据需要调整磁探测器的量程范围或更换更高灵敏度的磁探测器。通过该种方法可以获得速度、距离与已知被测体的函数关系式,通过该函数即可识别定位被测物的特征信息,实现巡航导弹的有效识别与定位。
4 结论
在对目前巡航导弹识别定位的各种探测方法的优缺点进行分析的基础上,设计了一种基于地磁场扰动探测的巡航导弹识别定位系统,通过磁场扰动反演巡航导弹位置、距离等特征信息。通过仿真计算可知,磁场扰动强度主要取决于被测物与磁探测器的距离、被测物的尺寸以及被测物的速度。距离越大,磁扰动强度越低;被测物尺寸越大,磁扰动强度越高;被测物速度越大,磁扰动强度越高,并通过Matlab给出了3个参数与磁场扰动强度的函数关系图。实验采用金属柱等比例模拟巡航导弹飞行穿过恒磁场的物理过程,证明了可以通过磁扰动强度的变化反演被测物的特征信息,为实现大范围准确识别、精确定位巡航导弹提供了一种新的思路。
[1] 胡海滨,龚沈光,林春生.地磁扰动时磁性目标的探测[J].探测与控制学报,2005(12):41-43.
[2] 樊海泉,董德存,朱 健.基于地磁传感器的车型识别方法研究[J].城市交通,2001(4):15-20.
[3] 曹 文,欧阳君,杨晓非.基于各向异性磁阻效应的地磁检测模块设计[J].舰船电子工程,2007(3):74 -76.
[4] 邓 滔.磁阻传感器在车辆航位推算系统中的应用研究[J].国外电子测量技术,2005(9):14-18.
[5] 王金根.航空磁探系统中目标信号检测与磁性目标定位研究[D].武汉:海军工程大学,2001.
[6] 彭富清.地磁模型与地磁导航[J].海洋测绘,2006,26(2):73-75.
[7] 唐劲飞,龚沈光.磁偶极子模型下目标定位和参数估计的两种方法[J].电子学报,2003,31(1):154 -157.
[8] Vissiere D,Martin A,Petit N.Using magnetic disturbances to improve IMU-based position estimation[C]∥Proceedings of the European Control Conference,2007:113 -115.
[9] Lenz J E.A review of magnetic sensors[J].IEEE Sensors Journal,1990,78(6):973 - 989.
[10]林春生,任德奎.海流感应电磁场的分析与计算[J].海军工程大学学报,2003,15(4):19 -22.
