变频恒压供水系统模糊PID混合控制策略研究*
2013-10-22李茂军袁卓异
张 静,李茂军,袁卓异,尹 超
(1.长沙理工大学电气与信息工程学院,湖南长沙 410004;2.长沙江南水务建设有限公司,湖南长沙 410007)
0 引言
随着社会经济的发展和人民生活水平的提高,对城市二次供水质量和供水可靠性的要求也越来越高。城市二次供水系统具有非线性、随机性、大惯性和纯滞后等特性,难以实施有效的恒压供水控制。目前,变频恒压供水系统普遍采用传统PID控制或模糊控制。PID控制精度较高,但存在控制参数难以整定、抗干扰能力差、调节时间长、供水可靠性低等缺点[1];模糊控制可避免传统PID控制参数整定复杂的弊端,提高供水可靠性[2],但模糊控制属于有差控制,常在稳定运行期存在供水压力偏差。为了对城市二次供水系统实施有效的恒压供水控制,人们做了大量的研究但这些控制策略只是对常规模糊控制的改与尝试[3~5],进或对PID控制中用模糊规则整定其控制参数,并未真正将PID控制调节精度高和模糊控制动态响应性能好的优点融合起来,难以设计出理想的恒压供水控制系统。本文融合模糊控制和PID控制的优点,构成模糊PID混合控制系统。
1 变频恒压供水系统原理
变频恒压供水系统如图1所示。系统由储水池、供水管网、水泵、变频器、压力检测仪表和控制器等组成。
变频恒压供水控制系统将安装在用户供水管前端的压力仪表检测的用户端水压信号送控制器,控制器将水压检测信号与设定水压值进行比较,控制算法基于比较后的水压偏差实时计算出控制量调节变频器的频率,从而调节水泵电机转速,达到用户端水压基本恒定的目的。当调节水泵电机转速无法保证用户端水压基本恒定时,可根据用户用水总量的变化增减水泵机组,维持管网水压基本恒定以满足用水要求。

图1 变频恒压供水系统Fig 1 Water supply system with variable frequency and constant pressure
2 模糊PID混合控制策略
基于PID控制具有控制精度高和模糊控制具有良好动态响应性能的优点,构建模糊PID混合控制系统,如图2所示。这种模糊PID混合控制系统在偏差很小时,控制量主要由PID控制算法给出,可以达到PID控制的高调节精度;在偏差较大时,控制量主要由模糊控制算法给出,可以实现模糊控制的良好动态响应性能。

图2 模糊PID混合控制系统Fig 2 Fuzzy-PID integrated control system
图2中,PID控制采取式(1)所示的常规PID控制算法

式中kP,kI,kD分别为比例系数、积分系数、微分系数,可按常规PID控制参数整定方法整定;e(t)为给定水压与实际水压之间的偏差;u(t)为控制量。
模糊控制器采取基于偏差和偏差变化率的二维模糊控制器,先离线计算模糊控制表,实际控制时查询模糊控制表即可得到控制量。
模糊PID混合控制系统的控制量u(t)由PID控制算法计算出的控制量uPID(t)和由模糊控制算法计算出的控制量uFuzzy(t)加权求和组成,其权系数根据偏差e(t)的大小自适应调整。模糊控制部分的权系数由式(2)确定

式中H为模糊控制部分权系数;a为与对象惯性时间常数、纯滞后时间等对数有关的系数,可通过实验整定。
3 仿真实验与结果分析
3.1 供水系统的近似模型[6,7]
水泵由初始状态向管网进行恒压供水,第一个阶段水泵将水送到管网,管网压力基本保持初始压力,是一个纯滞后的过程;第二个阶段水泵将水充满整个管网,压力随之逐渐增加直到稳定,这是一个大时间常数的惯性过程。系统中其他如变频环节、继电控制转换、压力检测等控制和检测环节的时间常数与滞后时间和供水系统的时间常数与滞后时间相比,可忽略不计,均可等效为比例环节。因此,恒压供水系统的数学模型可以近似成一个带纯滞后的一阶惯性环节,即
式中G(s)为恒压供水系统传递函数;k为系统的总增益;T为系统的惯性时间常数;τ为系统纯滞后时间。
为了辨识出供水系统的模型参数k,T,τ,让图1所示的变频恒压供水系统处于开环状态,即安装在用户供水管前端的压力仪表检测的用户端水压信号不送到控制器,直接调节变频器输出频率f(t),变频器根据f(t)调节水泵机组的电源频率,从而调节水泵机组的转速和功率,改变用户端水压大小p(t)。在实验中,f(t)可取一系列值f(t1),f(t2),f(t3),……,相应地可得到用户端水压p(t)的一系列值p(t1),p(t2),p(t3),……。根据f(t)→p(t)的大量实验数据对f(t1)→p(t1),i=1,2,3……,可由最小二乘法辨识出供水系统的模型参数k,T,τ。
3.2 仿真实验
以某城市小区二次供水系统为例,小区共有4栋楼,每栋18 层,每层4户,自来水管道压力为0.15~0.35 MPa,用水流量约为40 m3/h,最高扬程为50 m。经过辨识,被控制对象模型G(s)如下

借助Matlab 7.0仿真工具进行仿真分析,仿真实验系统结构见图3。

图3 仿真系统结构Fig 3 Structure of simulation system
图3中,控制器D(s)分别取PID控制器、模糊控制器和PID模糊综合控制器。系统输入R(s)取阶跃信号,水压期望值为 0.5 MPa。
仿真实验步骤如下:
1)对象模型取G(s),控制器取PID控制器,绘出并保存系统输出信号yPID(t)波形。
2)对象模型取G(s),控制器取模糊控制器,绘出并保存系统输出信号yFuzzy(t)波形。
3)对象模型取G(s),控制器取模糊PID混合控制器,画出并保存系统输出信号yPID-Fuzzy(t)波形。参数a从[1.5,2]中取值。
4)对象的惯性时间常数T取值在6.85~9.55 s之间变化,重复步骤(1)~步骤(3)。
5)对象的纯滞后时间τ取值在2.55~3.15 s之间变化,重复步骤(1)~步骤(3)。
图4是仿真实验步骤(1),(2)的结果,从图4可以看出:PID控制稳态误差为0,控制精度高,但超调量较大,调节时间较长;模糊控制超调量较小,调节时间较短,但存在稳态误差,控制精度不高。
图5是仿真实验步骤(3)的部分结果,从图5可以看出:模糊PID混合控制策略可以融合PID控制和模糊控制的优点,达到超调量小、调节时间短、控制精度高的目的,并且权重函数式(2)中参数a较大时控制效果更好。
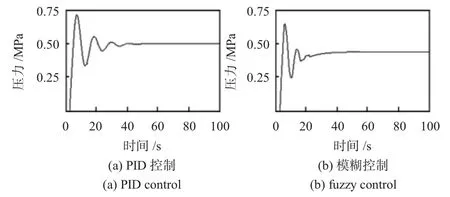
图4 PID控制和模糊控制的单位阶跃响应曲线Fig 4 Unit step response curve of PID control and fuzzy control
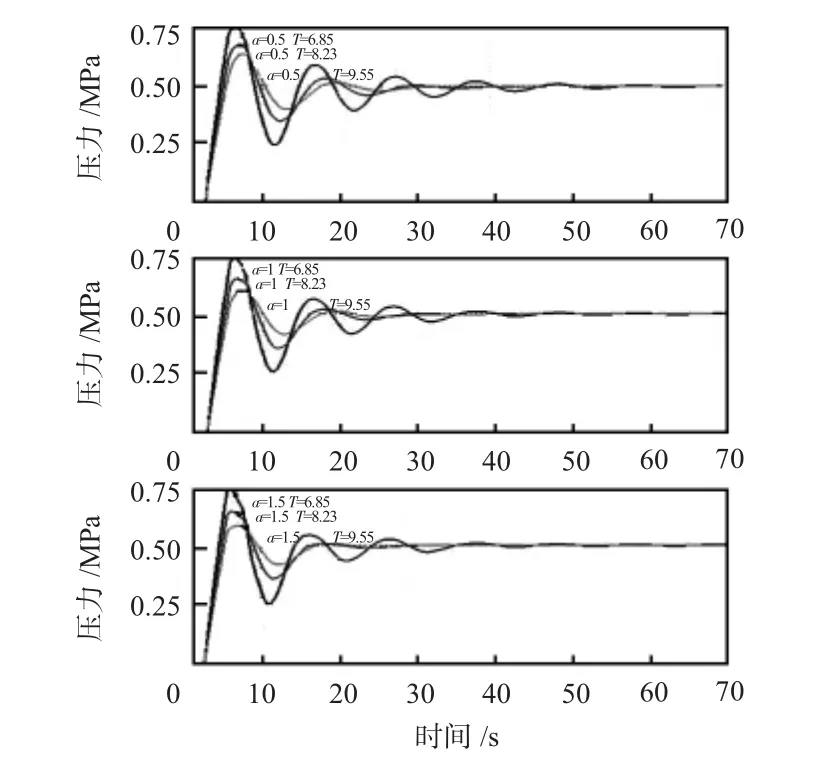
图6 对象惯性时间常数变化时的仿真结果比较Fig 6 Comparison of simulation results for variable object inertia time constant

图7 对象滞后时间变化时的仿真结果比较Fig 7 Comparison of simulation results for variable object lag-time
此外,仿真实验步骤(4),(5)的结果如图6、图7所示。结果表明:对象的惯性时间常数T和纯滞后时间τ取值变化时,模糊PID混合控制策略仍有很好的调节效果,并且权重函数式(2)中参数a较大时,控制效果更好,但对象惯性时间常数T较小和对象纯滞后时间τ较大时,权重函数式(2)中参数a不宜取得太大。实际应用时,由于不同控制对象的T和τ的变化范围不同,参数a的最终取值需在现场实际调试获得。
从上述仿真实验结果可以得到如下结论:
1)变频恒压供水模糊PID混合控制的水压调节效果与PID控制或模糊控制的相比,无论是动态响应性能还是调节精度都要好得多。
2)模糊PID混合控制策略对控制对象模型参数变化有很好的适应性。
4 结论
针对变频恒压供水的动态过程特点,提出了一种模糊PID混合控制策略。这种控制策略区别于传统的PID控制、模糊控制以及参数自整定的模糊PID控制算法,在偏差很小时控制量主要由PID控制算法给出,利用了PID控制调节精度高的优势;在偏差较大时控制量则主要由模糊控制算法给出,兼顾了模糊控制动态响应性能好的特点。
仿真实验结果表明:该控制策略对城市二次供水系统的模型参数变化具有很好的适应性,针对不同小区、不同的二次供水系统,在供水模型参数改变的情况下,只需适当调整控制参数,都能达到较好的控制效果,大大提高了二次供水质量。此外,该控制算法构造简单,实际应用时针对不同控制器(如单片机,PLC,DSP等)编程实现都很容易,在城市二次供水系统中具有广阔的应用前景。
[1] 冯冬青,孔祥伟,许 仿.城市恒压变频供水系统的一种智能优化控制策略[J].郑州大学学报:工学版,2011,32(1):85 -88.
[2] 张立辉.模糊控制变频调速恒压供水系统的研究与设计[D].长春:吉林大学,2007.
[3] 李国芳,张秀彬.基于参数寻优模糊控制变频调速恒压供水系统的设计[J].微电脑应用,2011,27(3):18 -21.
[4] 黄祥源.恒压供水模糊自适应PID控制器的设计、仿真[J].计算技术与自动化,2011,30(3):56 -61.
[5] 康会峰,黄新春,王 元.基于DSP的变频恒压供水模糊控制系统应用[J].电机与控制应用,2010,37(5):16 -20.
[6] 沈 晖,刘大铭.参数自适应模糊 PID在恒压供水中的应用[J].中国农村水利水电,2007(9):63-66.
[7] 严盈富.恒压供水系统的控制与仿真[J].南昌航空工业学院学报,2004,18(1):90 -93.
