基于加速度传感器的跳伞安全装置设计研究
2013-10-22屈剑平朱海涛张根雷
赵 炯,屈剑平,朱海涛,张根雷
(同济大学机械工程学院机械电子研究所,上海 201804)
0 引言
安全性一直是跳伞运动中最令人关注的问题,由于跳伞过程中会受到风速气流等各种天气因素影响,再加上跳伞运动员当时的身体状况,心理素质[1]以及跳伞经验等非自然因素,就可能导致降落伞无法顺利打开,引起跳伞事故。故而,如何保证降落伞及时打开就成了安全跳伞的关键所在。
考虑到跳伞过程中随着降落高度的变化所引起的人体加速度的变化,可以利用加速度传感器设计出一种新颖的跳伞安全装置,间接测量出跳出飞机后人体的下落高度,当检测到下降高度达到了危险设定值时,如果发现仍没有打开降落伞,则自动弹出伞包打开降落伞,达到减速下落的目的,保证人身安全。本文主要介绍了该装置的设计原理和结构。
1 跳伞安全装置的结构和原理
1.1 跳伞安全装置的结构
跳伞安全装置包括电控和机械2个子系统。电控系统包括0gn加速度传感器、微处理器、电机驱动和外围电路,构成高度检测的核心控制系统。机械系统是自行设计的弹簧插销弹出系统。
弹出系统是一种轻便简单的机械装置,如图1所示,包括直流电机、弹簧插销和滑轮。其中,质量块和弹簧固连在一起;插销通过软绳连接在电机主轴上,软绳1经过定滑轮;直流电机固连在外壳上;钩环固连在压紧弹簧的质量块上,钩环栓结软绳2,软绳2另一端和阻力伞相栓连,阻力伞位于伞包底部,如图2所示,只要拉出阻力伞,就可以弹出降落伞。
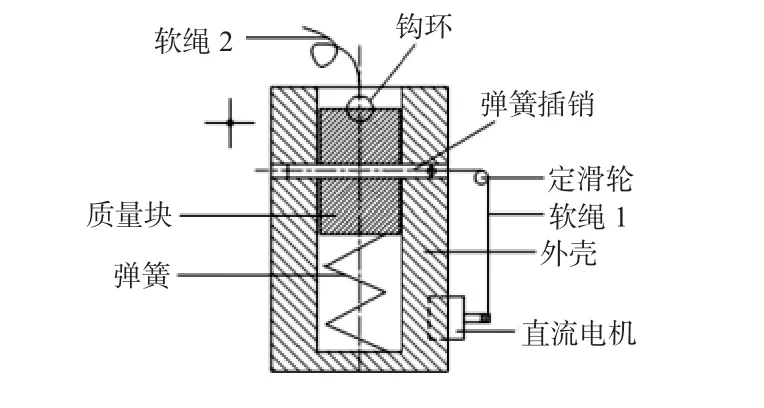
图1 弹出装置Fig 1 Ejection device
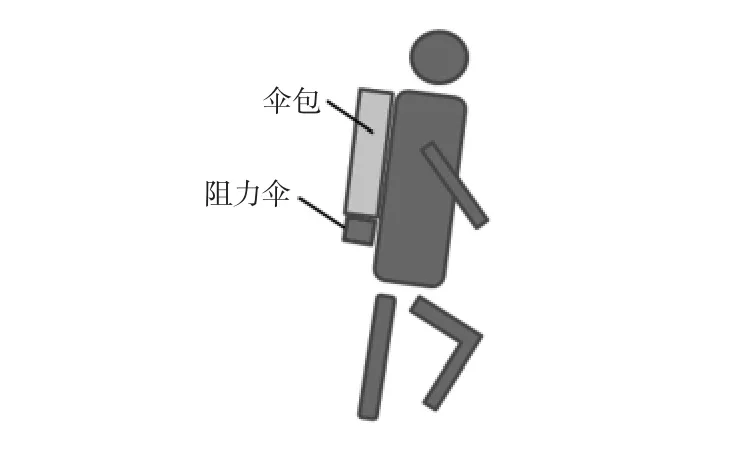
图2 阻力伞Fig 2 Resistance parachute
当电机收到信号开始转动,电机主轴转动,绕紧绳索将插销拉出,弹簧将物块弹出,从而拉出阻力伞,阻力伞鼓风膨胀展开,达到弹出降落伞的目的。
1.2 跳伞的物理运动过程
运动员从飞机机舱跳出到完成着陆,从物理上可以分为4个阶段,如图3所示,图3(a)运动员跳出机舱,竖直初速度为0,以重力加速度gn=9.8 m/s2下落;图3(b)随着下落速度增加,空气阻力增加,速度逐渐减小;图3(c)当重力和空气阻力达到二力平衡,运动员达到“终点速度”,约60 m/s;图3(d)到达预定高度,打开降落伞,空气阻力增大,减速下降,落地时速度约5 m/s。
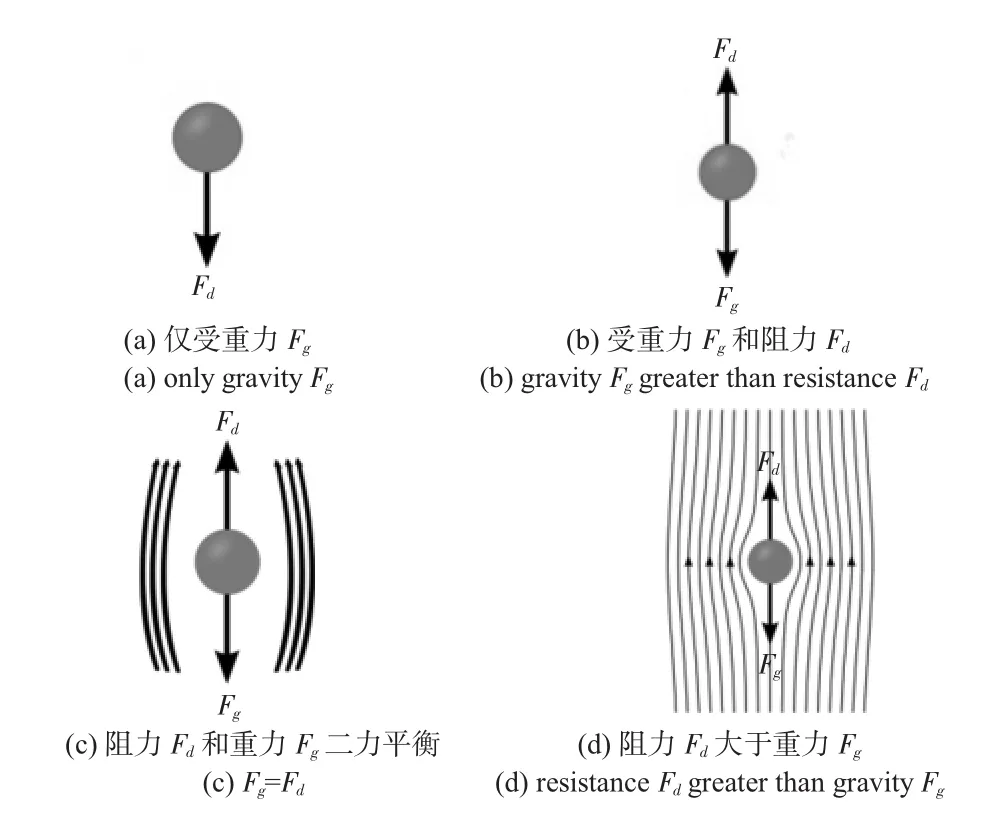
图3 降落的各个物理状态Fig 3 Various physical states of falling
本文利用加速度传感器对物体下落的距离进行检测。检测过程为:a.当运动员在飞机水平飞行时,竖直加速度为0,故而从飞机上跳下时,可以通过加速度传感器检测出加速度由0瞬变到9.8m/s2,然后开始计时;b.由位移—时间关系,经过一定时间后,可以计算出运动员下降的距离,当到达设定的下降距离时,检测装置检测是否已打开降落伞,如果没有,则自动打开,保证跳伞安全。检测过程的框图如图4所示。
由图4可以看出:精确测量预定时间值是决定安全装置测量高度可靠性的关键因素。下面就对跳伞的物理过程进行分析,以获得预定时间的准确值。
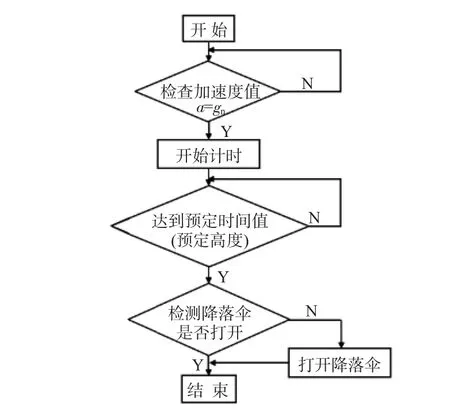
图4 检测原理框图Fig 4 Block diagramof measurement theory
1.3 物理运动过程的分析
在实际跳伞运动中,由于空气阻力,跳伞运动员在打开降落伞之前并不是做自由落体运动。在运动员不断下落的过程中,其下落速度逐渐增加,因而所受到的空气阻力FD也不断增加。所以,根据牛顿第二定律,有

式中m为运动员及其装备的整体质量;a为下落的瞬时加速度;FD为空气阻力;FG为运动员及其装备的整体所受重力。
由于在地表附近,任何自由落体的加速度约为9.8 m/s2,与其质量无关。由式(1)可以看出:随着空气阻力FD增大,最终运动员将会达到一个“终点速度”(terminal velocity),约为56 m/s。达到该“终点速度”受很多因素影响,如,质量、风阻系数、地球表面的位置、足够的下落高度等。
将式(1)变形,代入阻力和重力具体参数,得到方程

其中,ρ为空气密度,大气空气密度约为1.22 kg/m3;CD为风阻系数,跳伞运动员的风阻系数在1.1~1.3;A为跳伞运动员整体横截面积;v为下落的瞬时速率。
在空气密度一定的情况下,运动员从一定高度由静止下落,速率方程为

其中,υ∞为“终点速度”;gn为重力加速度,9.8 m/s2。由上面的分析可知,达到“终点速度”的条件是
则位移—时间关系为

其中,h为跳伞高度;y为瞬时高度。
通常,跳伞高度大约为3000 m左右,跳伞达到的“终点速度”v∞约为56 m/s,地表重力加速度gn=9.8 m/s2,代入式(6)得

相应位移—时间曲线如图5所示。
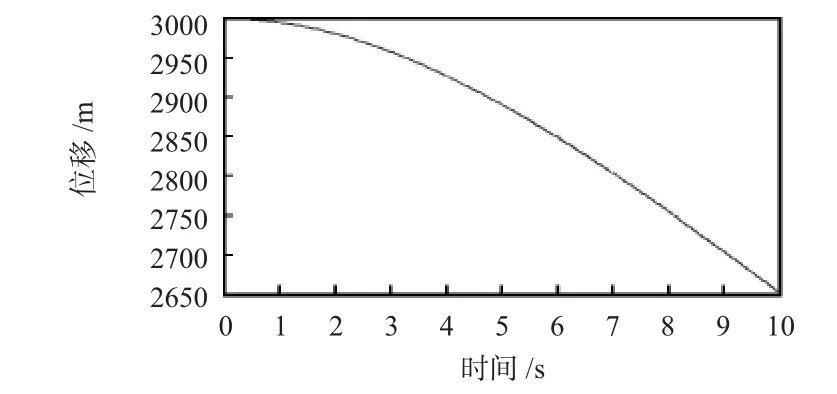
图5 位移—时间图像Fig 5 Displacement-time graph
例如:在跳伞运动中,若要求运动员在离地面高度760 m时必须打开降落伞,则v=760,代入式(7),得到降落到760 m时间t=43.96 s。即,从3000 m高度跳下后,当加速度传感器检测到加速度变为0时开始计时,计时到43.96 s时打开降落伞,开始安全减速下降。
1.4 加速度传感器的配置和使用
要使用加速度传感器,必须对它进行配置,主要涉及的寄存器有控制寄存器,状态寄存器,数据输出寄存器及中断相关寄存器。
1)控制寄存器
控制寄存器CTRL-REG1控制传感器的模式和X,Y,Z三轴的启动。为了启动设备读取加速度数据必须写入CTRL-REG1值 0xC7=0b10100111(正常模式,640 Hz,3 轴启动)来启用X,Y,Z3个通道。
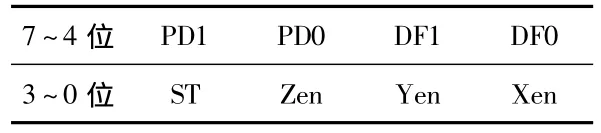
表1 控制寄存器CTRL-REG1Tab 1 Control register CTRL-REG1
[PD1:PD0]:00为掉电模式,默认;1x或x1为正常模式[DF1:DF0]:从00 到11 分别对应512,128,32,8,也对应了抽取频率40,320,640,2560 Hz。
控制寄存器CTRL-REG2用于配置量程和数据格式等;控制寄存器CTRL-REG3用于配置外部时钟等。
2)读取加速度值
使用状态寄存器STATUS-REG(27 h)
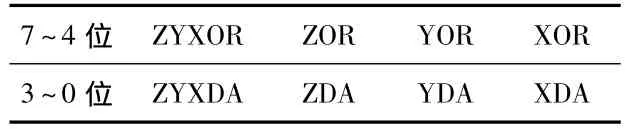
表2 状态寄存器STATUS—REGTab 2 Status register STATUS—REG
比特位ZYXOR置位表示X,Y,Z轴中有数据溢出;比特位ZOR,YOR,XOR置位分别表示Z,Y,X轴数据溢出;比特位ZYXDA置位表示X,Y,Z轴数据就绪;比特位ZDA,YDA,XDA置位分别表示Z,Y,X轴数据就绪。所以,读取状态寄存器,就可以判断数据是否就绪。读取加速度值序列如下:
a.读状态寄存器STATUS-REG,若STATUS-REG位3等于0,表示数据未就绪,则返回第1步;
b.若STATUS-REG位7等于1,表示数据已有溢出,可以读取;
c.读X轴数据输出寄存器OUTX-L和OUTX-H值,由于每轴数据由2个8位寄存器OUTx-L和OUTx-H组成,故需要读取2个寄存器获得一个维度的加速度;然后读取Y,Z轴数据输出寄存器OUTY-L,OUTY-H,OUTZ-L,OUTZ-H;
d.根据读到的数据,判断加速度是否为0;
e.返回第1步。
通过检查第2步就可以知道数据产生与读取速度是否匹配,如果所有数据被读取且此时新数据还没有产生,则覆盖位xOR会自动清除。
在第1步中,使用“数据就绪”信号来判断是否有新数据可读。该传感器利用HW信号(RDY信号,引脚6)判断新一组数据是否就绪。该信号以STATUS-REG寄存器位3为代表。当所有通道的高位数据被读取后该信号由高变为逻辑0。必须将 CTRL-REG2设为 xxxx01xx才可以使用RDY信号。
另外,为了保证一次性读取完整数据,要使用块数据更新特性。设置CRTL-REG2的BDU(Block Data Update)位为1,防止通道高(低)位未读取完毕而低(高)位已经更新为新数据,从而保证一个完整数据的顺利读取。
3)理解加速度数据
控制寄存器CTRL-REG2的DAS位设定数据是12位(0)或16位(1)模式。
12位模式:右对齐,最有意义位代表符号位;
16位模式:左对齐,低位保存在OUTX-L中且可能是随机值。
关于大小尾的选择,控制寄存器CTRL-REG2的BLE位清零(默认)为小尾。
那么,根据上述设置就可以判断数据寄存器的数据格式。当在12位模式下,OUTX-H的XD15~XD12位等于位XD11的值。
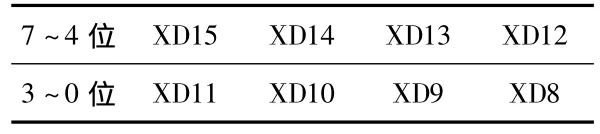
表3 OUTX-H寄存器Tab 3 Register OUTX-H
在16位模式下,执行左对齐,最右(低)4位为随机值。下面举个例子,若在小尾(little-endian)且为12位模式下(BLE=0,FS=2gn):
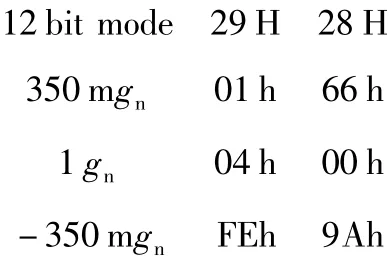
经计算:
0x166 对应十进制358,即350 mgn;
0x400 对应十进制1024,即1gn;
0xE9A对应十进制-358,即-350 mgn。
2 仿真结果与分析
由于在3000m以下,大气密度相对变化较小,而人体的风阻系数和截面积相对固定,所以,影响本安全装置的主要因素即为跳伞对象的体重。本文使用Matlab平台,估算不同体重运动员跳伞的打开时间。采用风阻系数CD=1.2,大气密度1.22kg/m3,人体截面积 0.5 m2,跳伞高度3000m,降落伞打开高度设定760m,测试对象体重60~80 kg,利用Matlab绘制降落伞打开前经过的时间,如图6所示。
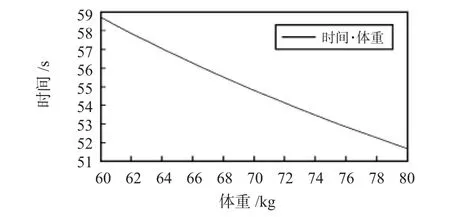
图6 不同体重对象的跳伞打开时间Fig 6 Parachute opening time vs different weight object
可以看出:体重和时间基本保持线性关系。即在跳伞前,根据跳伞对象的体重,可以准确地设定跳伞安全装置的打开时间,保证在到达指定高度时,能够打开降落伞,避免发生跳伞事故。
3 结论
传统跳伞的安全装置是使用高度计测量高度,高度计是利用不同高度气压高低不同的原理来测算高度的,受天气影响大,如果气压影响因素变化大,需要不断对高度计进行校正,对高度的测量不够简单可靠。
本文提出的安全装置是利用下落时间来测量下落高度,受外界影响主要是来自空气阻力,而空气阻力的不确定性仅仅只受风阻系数CD的影响,人体风阻系数相对固定,所以,整个测量过程受外接影响小,故而时间的测量也是精确可靠的。所以,可以使用本文叙述的跳伞安全装置作为现有跳伞安全的附加装置,能够大大加强跳伞的安全性。
[1] 李 敏,汪 涛.跳伞应激对伞兵心理情绪的影响[J].中国临床康复,2005,40(9):36 -37.
[2] 博文网.跳伞运动全接触[DB/OL].[2010—10—12].http:∥entertainment.bowenwang.com.cn/skydiving.htm.
[3] 王立鼎,罗 怡.中国MEMS的研究与开发进程[J].仪表技术与传感器,2003(1):1-3.
[4] 余 莉,史献林.牵顶伞在降落伞拉直过程中的作用[J].南京航空航天大学学报,2009,41(2):198-201.
[5] 孙大君.对“自由落体运动”问题的再认识[J].大学物理,2005,24(1):25 -27.
[6] Sloss A N.ARM嵌入式系统开发—软件设计与优化[M].沈建华,译.北京:北京航空航天大学出版社,2005.
[7] Wikipedia.空气[DB/OL].[2012—07—16].http:∥zh.wikipedia.org/wiki/空气.
