移动凸轮外轮廓线参数化设计方法探讨※
2013-10-21程婧璠肖志余袁小会
刘 兵 程婧璠 肖志余 袁小会
(武汉软件工程职业学院,湖北 武汉 430205)
一、引言
广泛应用于各种机械装置中的移动凸轮机构,是平面机构中的典型机构之一。由于移动凸轮机构从动件的运动规律决定于凸轮轮廓形状,所以其凸轮轮廓设计是凸轮机构设计的重点[1-3]。
移动凸轮机构中从动件的运动规律方程S=f(x)由设计要求给定的,从动件的运动规律是由凸轮轮廓曲线决定的,若能求得凸轮外轮廓线与从动件位移之间函数关系,利用PRO/E的参数化曲线绘制功能[4],可以绘制轮廓曲线。
文中应用参数化建模软件PRO/E,探讨利用参数化方法设计移动凸轮轮廓曲线。
二、移动凸轮轮廓曲线设计
(一)移动凸轮机构运动分析
移动凸轮推动从动件运动如图1所示。

图1 移动凸轮推动从动件运动示意图
由图1可知,移动凸轮轮廓线笛卡尔坐标系方程为:

式(1)(2)中,H0为初始位置;x为移动凸轮的移动距离;S(x)为从动件位移与凸轮移动距离的函数关系。
(二)移动凸轮轮廓线绘制
如图2所示,在PRO/E中定义移动凸轮主要结构参数:

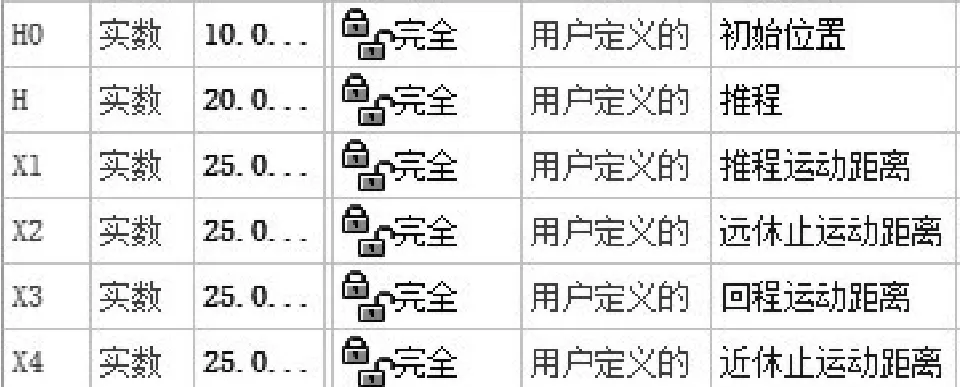
图2 在PRO/E中定义移动凸轮相关参数
若已知从动件运动方程S=f(x),根据从动件运动规律,将其运动过程分为推程段、远休止段、回程段、近休止段等四个阶段,分别代入式(1)、(2)中可得到移动凸轮轮廓在笛卡尔坐标系模式下曲线。
案例:移动凸轮运动机构,H0=10,H=20,X1=X2=X3=X4=25。从动件做简谐运动。
推程段从动件运动方程:
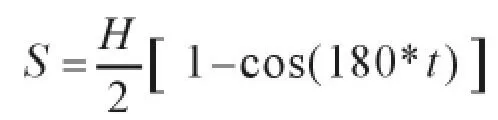
式(3)中,t为参数,0≤t≤1。
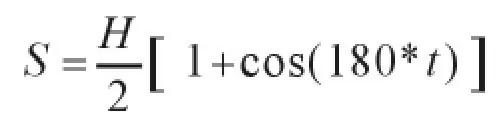
回程段从动件运动方程:
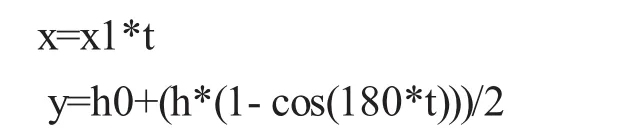
在PRO/E中插入基准曲线,根据简谐运动规律输入四个阶段曲线的柱坐标方程:
推程段
远休止段
回程段

近休止段

分推程段、远休止段、回程段、近休止段等四个阶段绘制移动凸轮轮廓曲线,见图3。

图3 移动凸轮轮廓曲线
将图3轮廓曲线作为扫描曲线,设计移动凸轮结构如图4所示。
(三)其他条件凸轮轮廓绘制
对于给定从动件在离散点的位移的凸轮轮廓线的绘制,可利用离散点数据绘制从动件位移在一个周期中的图形特征 (graph),利用PRO/E中的evalgraph函数获得在一个周期中从动件与凸轮转角的函数关系。根据凸轮不同类型,将函数关系代入凸轮从动件运动方程中,可方便地获得凸轮轮廓曲线。
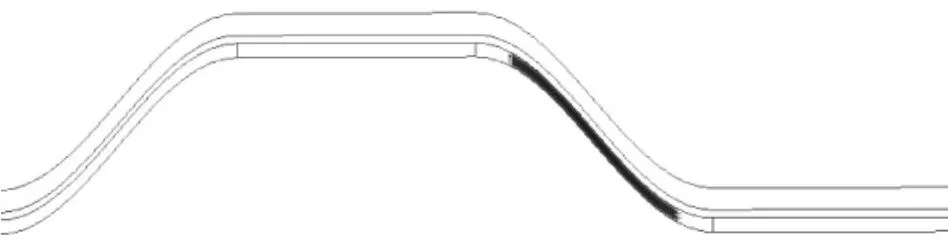
图4 移动凸轮结构
三、结语
文中利用PRO/E软件参数化特点和相关函数,根据移动凸轮从动件运动方程,对移动凸轮外轮廓线绘制方法进行了探讨,该方法也适用于盘形凸轮和圆柱凸轮等的外轮廓线绘制。
研究表明,应用参数化建模软件PRO/E设计与修改凸轮轮廓线,具有设计精度和设计效率较高的特点,可广泛应用于凸轮机构设计。
[1]刘兵,程婧璠,张蓓.基于PEO/E的凸轮外轮廓线参数化设计方法[J].机械工程师,2013(12).
[2]王东.基于PRO/E关系式的凸轮轮廓曲线精确设计[J].机械设计,2010(27).
[3]石固欧.机械设计基础[M].北京:高等教育出版社,2008.
[4]黄恺.Pro/E参数化设计高级应用教程[M].北京:化学工业出版社,2010.
