一种基于误差相关函数的改进变步长LMS算法
2013-10-17王崇辉
王崇辉,邹 鲲
(1.陕西广播电视台发射部,陕西西安 710061;2.空军工程大学信息与导航学院,陕西西安 710077)
最小均方(Least Mean Square,LMS)算法是由Widrow和Hoff于1960年提出的[1],该算法是基于最小均方误差准则的维纳滤波器和最陡下降法。LMS算法特点是计算量小、易于实现,因此获得广泛应用。LMS算法中,要提高收敛速度,步长应该尽量选择较大值,而为降低稳态方差,步长应该选择较小值。因此在LMS算法应用中,只能折衷设定步长大小,不能同时满足快的收敛速度和小的稳态方差的要求[2]。
针对LMS算法的不足,人们提出了各种的变步长(Variable Step Size,VSS)LMS 算法[3-4]。所谓VSSLMS算法,就是在算法的迭代过程中,根据当前系统的状态信息,动态改变步长的大小,从而提高收敛速度的同时还可以降低稳态方差。一般在收敛开始阶段,要求步长较大,从而提高过渡到稳态的收敛速度。在收敛结束后,需要小的步长,这样可以减小由于步长较大而引入的失调,即稳态方差。
在这些VSSLMS算法中,有一类是将步长与瞬时误差平方相关联[5],因为瞬时误差平方在收敛开始时较大,而在收敛结束后较小,称为E-LMS算法。另一类算法则是将步长与误差的相关函数相关联[6],因为在收敛开始时,误差中间的相关分量较大,而处于稳态时,可以假定误差分量不相关,称为R-LMS算法。由于系统不可避免的引入其他噪声分量,而E-LMS算法中由于瞬时误差平方中包含噪声分量,导致该方法的抗噪性能较差,而R-LMS算法则是由于相关函数具有“记忆”效应,导致当系统性能突变时,跟踪能力较差。为此文中结合E-LMS算法中的变步长策略,对R-LMS算法进行了改进,改进后的算法在抗噪性能和跟踪性能都得到了较大的提高。
1 VSSLMS的基本原理
以系统辨识[7]为例来讨论VSSLMS算法。自适应滤波器配置方式如图1所示。输入信号为x(n),参考信号d(n)是未知系统的输出y(n)和加性噪声分量v(n)的叠加。而由参考信号与自适应滤波器输出信号之差构成误差信号e(n)来控制自适应滤波器中的系数,对于LMS算法,就是通过调节滤波器系数,使得均方误差最小。
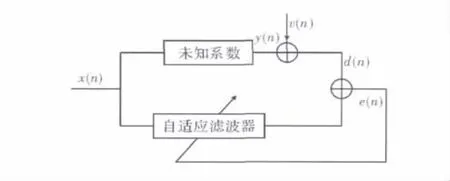
图1 自适应滤波原理图
LMS算法中的自适应滤波器系数迭代关系为

为此提出了多种VSSLMS算法,其基本思路就是将步长大小与迭代过程中的某种状态变量关联,利用状态变量的变化来动态控制步长的变化。这些状态变量可以是瞬时误差,瞬时误差的平方,相邻两次迭代的瞬时误差的相关函数,误差与输入矢量的相关性等[8],这些状态变量在收敛开始时可能较大,而在收敛后可能较小,因此满足动态控制步长的要求。其次关联的方法也多种多样,可以是线性或者非线性的,也可以是递归或非递归的。其中非线性关联方式计算量比线性关联要大,递归关联相对于非递归关联,需要更多的存储空间。
这些VSSLMS算法当中,有一类是将步长与瞬时误差平方相关联,称之为E-LMS算法。关联的方式通常是非线性非递归形式,其算法为

图2为该方法的学习曲线和常规的LMS算法的比较,可以看出,稳态方差比LMS算法要高,尤其是当SNR较低时,稳态方差更大,因此该方法的抗噪性能较差。

图2 不同SNR下,E-LMS算法与LMS算法的学习曲线
另一类算法是将步长与相邻两次迭代的瞬时误差的相关函数相关联,称之为R-LMS算法,采用的是线性递归形式,其算法为

其中,0<β,α <1,λ≪1,通过选择合适的参数,也可以得到较为理想的性能。式(4)是一个计算相关函数的公式,其中参数β通常称为遗忘因子,如果参数β较大,则说明该算法具有一定的“记忆”能力,也就是对当前的输入不敏感。为获得较为精确的相关函数,β通常尽可能地接近1。但当算法处于稳态时,系统内部发生突变,则这时的e(n)e(n-1)可能很大,此时应具有较大的步长,尽快过渡到收敛状态。但由于式(4)具有一定的记忆能力,因此对相关函数计算值的影响不大,因此利用式(5)计算出的步长还是维持在很小的值附近。这就说明该算法对于突变系统的跟踪能力较弱。
图3表示SNR=20 dB条件下,R-LMS算法的跟踪能力,假定在迭代次数达到750点处,未知系统的参数发生改变。如图3所示,虽然开始时,R-LMS比LMS算法有更快的收敛速度,但是一旦系统发生突变,R-LMS算法的收敛速度将缓慢。
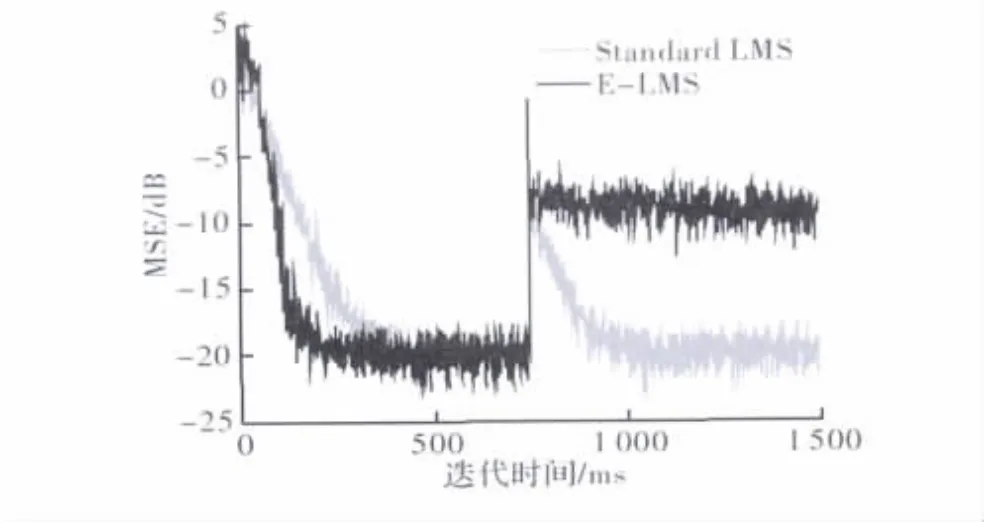
图3 R-LMS算法的跟踪能力与LMS算法对比
2 改进的VSSLMS算法
可以看出,影响R-LMS算法的主要因素来自与式(4)中的遗忘因子β,正是由于其接近1,使得相关函数的计算具有较强的记忆能力,从而对系统参数突变引入的较大误差分量不敏感。参考E-LMS算法,如果参数β能够误差平方满足一定的关联方式,就可以使得当系统突变时,适当减小β值,使相关函数的计算遗忘能力增强。本文给出的算法为

式(6)~式(7)实际是综合了E-LMS算法和RLMS算法两种控制步长的策略。其中式(7),式(8)与R-LMS算法的步长设置完全一致,唯一不同的是因子β不是常量,因子β的控制也是通过迭代过程实现的,其控制方式与E-LMS算法中的式(3)类似,与瞬时误差功率有关。这样,本文所给出的算法中,参数β不再保持常数,而是受误差平方的控制,从而使得误差相关函数计算的记忆能力能够调整,相对于R-LMS算法,可以改善算法针对突变系统的跟踪能力,同时步长与误差相关函数关联,而不与误差平方相关联,相对于E-LMS算法有更好的抗噪声能力。
图4是本文算法的抗噪性能分析,和图2给定的条件一样,与常规LMS算法进行对比,可以看出该算法的稳态方差与LMS算法基本相等,而与图2对比可以看出,E-LMS算法随着SNR降低,稳态方差显著增大。因此可以确定该算法的抗噪性能优于E-LMS算法。
图5是本文算法的跟踪突变系统的能力分析,和图3给定的条件一样,但是当系统发生突变时,本算法能够及时跟踪,并快速进入到稳态条件,说明本算法的跟踪能力优于R-LMS算法。

图4 改进的VSSLMS算法的抗噪能力分析

图5 改进的VSSLMS算法的跟踪能力分析
3 结束语
常规LMS算法的固有矛盾是收敛速度和稳态方差无法同时满足,为此人们研究了各种VSSLMS算法,其中E-LMS算法是将步长与输出误差平方相关联,该方法抗噪能力有限,R-LMS算法则是将步长与输出误差的相关函数相关联,该方法的跟踪突变系统能力有限。本文给出了改进的VSSLMS算法,能够克服E-LMS算法和R-LMS算法的缺点,从仿真结果来看,抗噪能力优于 E-LMS算法,跟踪能力优于R-LMS算法。
[1]WIDROW B,STEARNS S D.Adaptive signal processing[M].Prentice Hall,NJ:Englewood Cliffs,1985.
[2]HAYKIN S.Adaptive filter theory[M].3rdEdition.New York:Prencice-Hall,1996.
[3]HARRIS R W,CHABRIES D M,BISHOP F A.A variable step adaptive filter algorithm[J].IEEE Transaction on A-coustics Speech and Signal Proc,1986,34(4):309-3l6.
[4]KWONG R H,JOHNSTON E W.A variable step size LMS algorithm [J].IEEE Transaction on Signal Processing,1992,40(7):1633-l642.
[5]SHAN T J,KALLAITH T.Adaptive algorithm:an automatic gain control feature[J].IEEE Transaction on Acoustic,Signal Processing,1991,35(1):122-127.
[6]蒋明峰,郑小林,彭承琳.一种新的变步长LMS自适应算法及其在自适应噪声对消中的应用[J].信号处理,2001(3):282-286.
[7]罗小东,贾振红,王强.一种新的变步长LMS自适应滤波算法[J].电子学报,2006,34(6):1123-1126.
[8]高鹰,谢胜利.一种变步长LMS自适应滤波算法及分析[J].电子学报,2001,29(8):1094-1097.
