柔性坐标测量机结构参数标定的采样覆盖率研究
2013-10-17于连栋
刘 菲,于连栋
(合肥工业大学仪器科学与光电工程学院,安徽合肥 230009)
柔性关节式坐标测量机灵活、便携、成本低,而适用于车间和实验室现场使用,且其测量精度已达到传统三坐标测量机中等精度水平[1]。由于关节臂式坐标测量机为多级串联式极坐标测量系统,测量机的原始总误差较大,因此国内外学者普遍采用对关节式坐标测量机结构参数进行精确标定的方法来提高测量机的精度[2]。结构参数标定的关键是标准件的制造或选取以及结构参数优化算法,同时采样策略也是标定过程中需着重考虑的因素。文中以两端带有锥孔的标准件进行采样,提出采样覆盖率指标,并研究各关节采样覆盖率对标定结果的影响,以评定测量机标定时采样是否充分。
1 各关节的采样覆盖率
柔性坐标测量机结构参数的标定算法中通常有3种:非线性最小二乘法、遗传算法、模拟退火算法[3]。通过建立统一的损失函数并从算法的速度和稳定性等方面分别对3种标定算法进行对比,发现非线性最小二乘法耗时最短,结果也最稳定。所以采用非线性最小二乘法作为柔性坐标测量机标定的优良算法[4]。图1说明了线性最小二乘法拟合时的类似情况,若采样点仅集中在图中“+”号的区域,则得到的线性模型为图中虚线,再继续增加该区域内的采样也不会有较大改变,所以为提高最终拟合精度还应扩展采样区域,如图中“O”号所覆盖的区域。因此有必要提出采样覆盖率指标,以评定测量机标定时采样是否充分,只有充分的采样才能使拟合结果更准确。
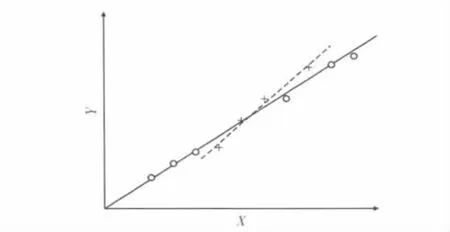
图1 线性最小二乘法拟合曲线
对于覆盖率的计算可采取如下的方法[5]:(1)将关节转角的范围以度为单位划分,每一份设置一个占位位置。(2)将关节采样得到的角度4舍5入,并将相应位置标记为有效占位。(3)计算采样数据组中有限占位的个数,与该关节活动范围相除,得到的结果作为该组数据对该关节的采样覆盖率。
2 各关节转角变量对测量精度的影响
柔性坐标测量机的测头坐标是通过非线性变换得到的,因此测量机6个关节的结构参数对其实际测量精度的影响程度也有所不同[6]。转角范围和采样角度是各个关节采样覆盖率的求解因子,研究采样覆盖率对测量精度的影响权重即是研究转角参数对测量精度的影响权重。通过模拟实验计算各个关节转角误差对测量精度权的大小,找出影响最大的关节。
分析关节转角误差对测量精度的影响。在分析前先设置一个基本位姿,取各个关节中间位置[180°,90°,180°,90°,180°,90°]。在每个关节的转角范围内,依次改变基本位姿态中的一个变量,回转关节每隔1°取值,摆动关节每隔0.5°取值,关节转角参数存在0.05°的误差,模拟计算误差值,绘制误差曲线图。关节1、3、5为回转关节,误差分布如图2(a)、图2(c)、图2(e),关节2、4、6 为摆动关节,误差分布如图 2(b)、图 2(d)、图2(f)所示。
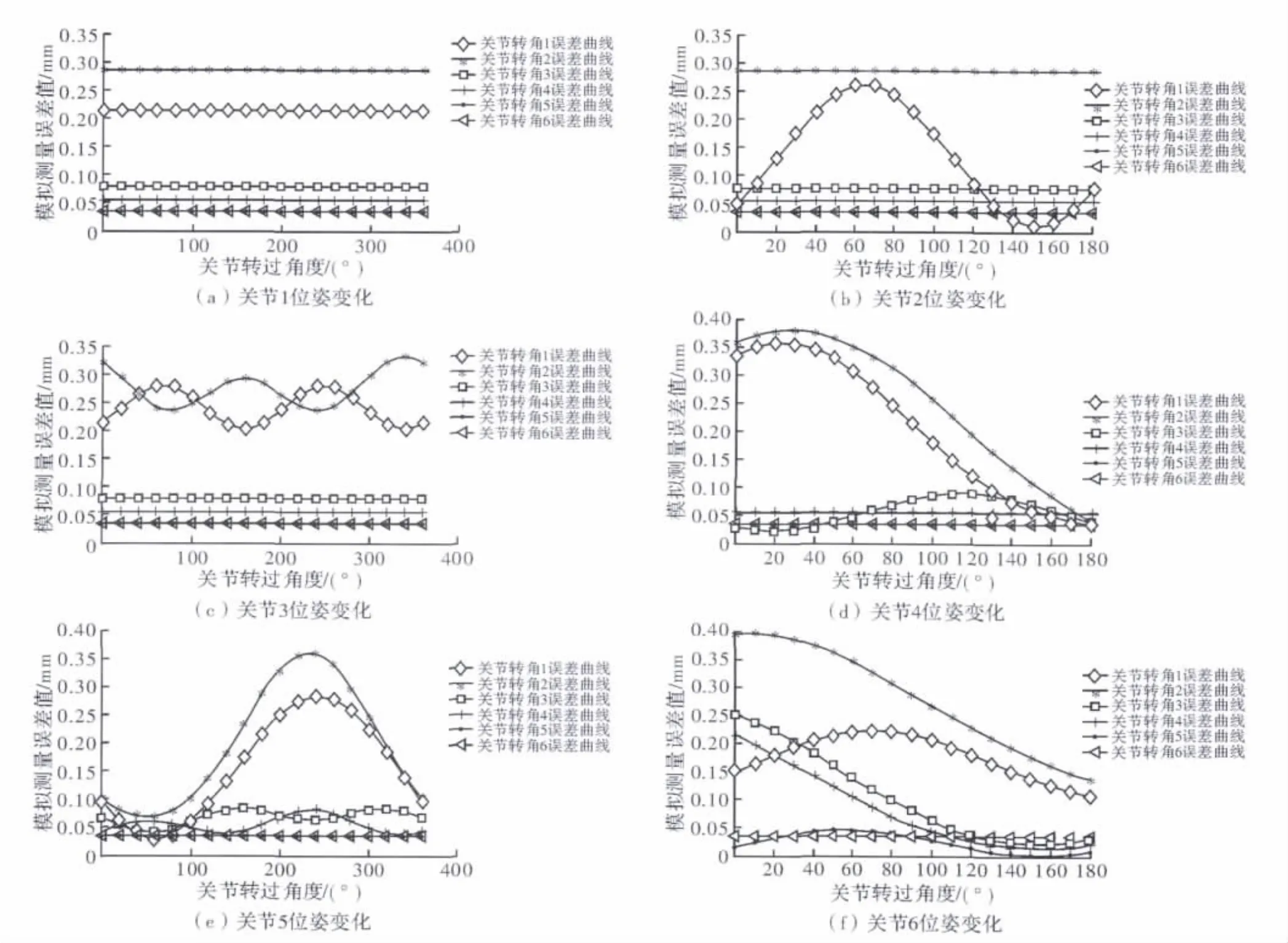
图2 关节转角误差分布图
分析图2可知各个关节转角误差对测量精度的影响是变化的,不便于相互比较,于是取各个关节转角所造成的测量误差的平均值进行比较,得出各个关节转角误差对测量精度的影响权重为2-1-4-3-5-6。
3 采样覆盖率对测量精度的影响
由模拟实验可知第1、2关节的转角对测量误差的影响权重最大,所以着重考虑第1关节和第2关节采样覆盖率对测量机最终测量精度的影响。
对于关节1:(1)将标准件与基座的半径固定,标准件高度固定,绕基座120°实验,均匀采样240个数据,采样覆盖率为62.37%,将100 mm量块放入0°~120°之间任意位置进行测量;再将此量块放入前面测量的0°~120°以外范围任意摆放进行测量。(2)将标准件于基座之间以同样的半径固定,绕基座360°进行实验,均匀采样720个数据,采样覆盖率为82.22%;再将100 mm量块放入前面测量的0°-360°之间任意位置进行测量。
对于关节2:(1)将标准件与基座的半径固定,用特定的夹具固定关节1,上下移动标准件进行实验,使关节二的角度变化在较小的范围(0°~45°),并均匀采样240个数据,采样覆盖率为69.98%,同时将100 mm量块放入0°~45°之间的任意位置进行测量;再将此量块放入前面测量的0°~45°以外的范围任意摆放进行测量。(2)将标准件于基座之间以同样的半径固定,固定关节1,上下移动标准件,使关节2的角度变化充满整个可移动的空间(0°~60°,297°~360°),均匀采样720个数据,采样覆盖率为90.21%;再将量块放入前面测量空间的任意位置进行测量。
对于第1关节,采样覆盖率为62.37%和82.22%的情况下,在采样范围内对量块进行100次测量的标准差分别为0.102 8 cm、0.076 8 cm,在该范围之外对量块测量的标准差为0.163 4 cm;而对于第2关节,采样覆盖率为69.98%和90.21%的情况下,采样范围内对量块同样进行100次测量的标准差分别为0.132 9 cm、0.081 2 cm,在这范围之外对量块进行测量的标准差为0.185 5。所以第1关节和第2关节仅在较小的角度范围内转动,使用所得参数进行测量时发现,测量机仅在该范围内能够给出较好的测量结果而在其余区域偏差较大。若标定时这两个关节的角度具有良好的采样覆盖率,所得结构参数便可避免上述情况。
4 结束语
针对柔性坐标测量机结构参数标定时使用的最小非线性二乘法,参考拟合情况提出采样覆盖率。考虑到关节转角范围和采样角度是计算采样覆盖率的必要因子,从各关节转角参数对测量精度的影响权重这一角度进行模拟实验,发现关节1和关节2的权重最大。
最终针对权重大的两个关节进行对比性标定实验,验证了关节的采样覆盖率越大,其采样角度越充分,测量结果也越准确。
[1]LARRY A.Competition rising in portable CMMs[J].Quality Measurement Test and Inspection,2002(7):18-22.
[2]张国雄.三坐标测量机的发展趋势[J].中国机械工程,2000,11(1-2):222-226.
[3]高贯斌,王文,林铿.应用改进模拟退火算法实现关节臂式坐标测量机参数辨识[J].光学精密工程,2009(10):2499-2505.
[4]程文涛,于连栋,费业泰.关节式坐标测量机参数识别算法研究[J].中国科学大学学报,2011(1):45-49.
[5]程文涛.关节式坐标测量机标定技术研究[D].合肥:合肥工业大学,2011.
[6]林铿.关节臂式坐标测量机的误差分析与补偿研究[D].杭州:浙江大学,2010.
