PixelGrid4.0在自动空中三角测量中的应用
2013-09-29段志强周安发
邵 军,段志强,周 毅,周安发,许 国
(1.湖北省基础地理信息中心,湖北 武汉430074)
空中三角测量是利用少量地面控制点将整个区域网连接成一个整体,通过区域网平差计算一个测区中所有影像的外方位元素和所有加密点的平面位置和高程的方法[1]。加密的精度直接影响后续DEM、DOM产品的生产,因此它是摄影测量的关键。如何提高加密的精度和速度,减少野外像控测量的成本,是在实际生产应用中必须考虑的问题,很多文献论述了这一问题[2];笔者根据多年的工作经验,采用PixelGrid4.0软件来对这一相关技术问题进行初步探讨。
1 PixelGrid4.0系统及其优点
PixelGrid4.0是以全数字化摄影测量和遥感技术理论为基础,针对目前高分辨率遥感影像的特点和现有数据处理软件及系统中仍然存在的困难和不足,采用基于RFM通用成像模型的遥感影像稀少控制区域网平差、基于多基线多重匹配特征的高精度数字高程模型自动匹配、高精度影像地图制作与拼接等技术开发的新一代遥感影像数据处理软件。系统全面实现对多种高分辨率卫星影像和航空影像(包括无人机航空遥感影像)的摄影测量处理,构建集群分布式网络,采用计算机多核并行处理、自动化和人工编辑相结合的作业方式,完成遥感影像从空中三角测量到各种国家标准比例尺的DLG、DSM/DEM、DOM等产品的生产任务[3]。
PixelGrid4.0系统具有的优点有:①多数据源支持:采用统一的RFM传感器成像几何模型、数据处理算法及作业流程,如高分辨率卫星影像、传统扫描航空影像数据和新型数字航空影像、无人机获取高分辨率遥感影像及后续数据处理、支持ADS40/80推扫式航空影像等;②稀少控制点区域网平差:采用基于RFM通用成像模型的先进算法,实现对稀少或无地面控制点区域的区域网平差技术;③采用基于尺度/旋转不变性特征的高精度多基线影像匹配算法;④高生产效率:PixelGrid软件跟同类软件相比,自动化程度高,控制点的需求少,大大减少了外业控制点的测量工作量和费用,还可以采用多机多核处理DEM匹配等耗时较多的工序。
2 基于PixelGrid4.0系统的航空影像数据处理
2.1 研究区及数据源
襄阳市位于鄂西北,东经110°45'~113°43',北纬31°14'~32°37',踞汉水中游。全市辖襄阳、枣阳、宜城、南漳、谷城、保康6个县和代管老河口县级市。东邻随州市,南界钟祥市、荆门市、远安县、宜昌县、兴山县,西连神龙架林区、房县、丹江口市,北接河南省邓州市、新野县、唐河县、桐柏县,边境界线长1 332.8 km。本研究区选取该测区比较典型的丘陵地形进行实验,面积约为200 km2,如图1所示。

本研究的基本资料有120张航空影像数据,UltraCam Xp相机及航摄参数文件,相关航飞设计书和技术鉴定书等;成果检查采用湖北省基础地理信息中心整理的600 km2高精度1∶500 DLG成果(襄阳本地坐标系,1956黄海高程系),空三加密结果用于生产1∶2 000 DOM。
2.2 PixelGrid4.0空三加密主要步骤
利用PixelGrid4.0软件进行空三加密的主要步骤如图2所示。
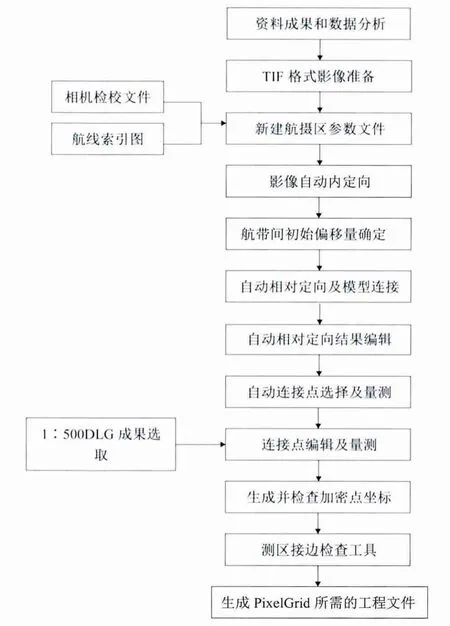
图2 作业流程图
1)数据准备及预处理。利用PixelGrid4.0软件进行自动空三加密一般需要数字影像、相机参数及校检文件、测区基础控制测量和像片控制测量数据、技术设计书、航空摄影鉴定表、航摄分区结合图等资料。在进行空三加密前,一般需对航空影像进行畸变差预纠正、彩色影像转灰度、影像旋转、新建航摄区参数文件等预处理。
2)自动内定向。在自动内定向之前应预先生成索引影像。内定向的目的是建立一个变换,该变换将从影像中测量或提取的特征变换到以相机摄影中心为原点的三维笛卡尔坐标系下,该坐标系称为影像坐标系;而数字影像的参考坐标系为像素系。自动内定向就是无需人工干预而执行整个内定向的过程[4]。数字航摄影像PixelGrid4.0软件能快速准确地实现测区影像的全自动内定向。此次襄阳试验区120张航片,自动内定向约0.5 min完成。
3)自动相对定向。相对定向是一个基本的较为完善的摄影测量过程,其目的是确定立体模型的定向元素,以便DEM生成和地图测绘等后续工作能在立体环境下进行。自动相对定向关键在于影像的匹配,即找同名点[5]。由于此实验区属于大测区生产,需要自动相对定向时间较长,根据实际经验选2进程进行,避免3进程夜间作业超负荷计算自动停止。PixelGrid4.0针对自动相对定向失败的情况,可以删除单个立体模型上下视差较大的点,再次执行自动相对定向直至该立体模型满足相对定向为止。
4)确定航带的偏移。确定航线间偏移的目的是建立相邻航线间的连接关系,航线连接点就是传统空中三角测量中的拼接点,主要包括概略确定航线连接点和连接点的交互式编辑2方面内容。当每条航带内影像数不多于15 张时,在航带首尾分别选择一个初始点即可,若多于15张,则需要在航带中间位置再加一个初始点,结合测区的形状,该研究区共选取了20个航带初始点。
5)自动选点和转点。在空三加密过程中,为了保证定向精度和便于后续易于探测粗差点,需要提取大量的连接点。PixelGrid4.0采用基于RFM通用成像模型的先进算法,在选点、转点过程中,只需少量的控制点,即可选取大量满足精度要求的连接点。整个选点和转点过程可实现全自动化。在加密过程中,PixelGrid4.0记录并显示详细的转点信息,用户很容易发现如定向失败、模型连接失败等异常情况,能及时准确地作出处理。PixelGrid4.0自动选点和转点主要是通过航带间初始偏移量确定和自动相对定向及模型连接功能模块来实现。
6)自动挑点。PixelGrid调用著名的光束法区域网平差程序PATB,能高效、可靠和自动地剔除像点网中的粗差点[6]。根据用户选定的连接点分布方式,挑选精度最高的点作为加密点。对于本试验区, 采用 3×5个标准点位, 每个标准点位5个点的方式进行连接点的选取[3], 如图3所示,最终产生5 160个连接点, 单位权中误差为2.67 μm, 用时8 min;经检查此试验区自动模型连接情况良好, 无需人工干预。
7)连接点编辑与量测。通过自动挑点,对剩余的5 160个正常点进行连接点编辑与量测,从而实现平差计算。连接点编辑与量测主要目的是实现2条航带影像间的连接。PixelGrid4.0可以自动显示粗差点,方便用户进行调整;可对自动挑点后的粗差点进行编辑。编辑完所有的粗差点后,再调用PATB 解算,直至没有粗差点,最后就可自动创建加密点文件了。

图3 连接点分布设置对话框
8)平差计算。它是空中三角测量中最关键的环节,主要包括区域网平差与平差结果分析2部分。区域网平差用鼠标左键点击连接点编辑主界面工具条按钮,调用PATB进行区域网平差计算,计算完毕后进入下步作业。平差结果分析在交互式编辑界面中执行菜单命令平差→显示PATB粗差报告,系统会调用Windows的记事本打开PATB的平差报告。在PATB报告中,精度超限的像点会作为粗差观测值不参与最后的平差计算,下面显示的是PATB报告中的粗差报告部分。本研究区共选取15个平高点,10个高程点,基本定向点平面最大限差0.30 m,高程最大限差0.25 m,符合绝对定向后平面位置与高程限差相关要求,此空三加密成果符合1∶2 000 DOM精度。
9)生成加密点文件。当测区接边和相对定向成果均符合限差要求时,在主界面中点击生成并检查加密点坐标生成加密点,系统会自动将最终的加密点成果写入*.ctl文件(如果加密文件是以*.pas命名,则加密文件中会包含1∶500 DLG上选取的点),共生成1 275个加密点。
2.3 空三加密结果精度的检测
区域网平差的实际精度是通过多余控制点的地面实际测量坐标与摄影测量加密点坐标值的差值来计算的,将二者坐标的差值视为真差值,由这些真差值计算点位坐标精度[7]。这些多余的控制点被当作空三加密的检查点,一般使用检查点中误差值作为评定空三成果精度的依据[8]。研究区涉及的标准1∶10 000图幅共6幅,每幅图的检点数量视具体情况而定,一般不少于20个点,共抽取120个平高点进行检测,在1∶500 DLG上读取明显目标点坐标并输入计算机中,与数字正射影像上同名点坐标相比较,其平面中误差计算公式为:

式中,Ms为点位中误差; Xi为坐标X的检测值;xi为原值;Yi为坐标Y的检测值;yi为原值;n为检测点点数。
数字高程模型点的中误差公式为:

式中,Δhi为高程较差;n为检测点点数。
根据式(1)和式(2),可得出研究区标准1∶10 000图幅参与检测的加密点平面和高程中误差,如表1。
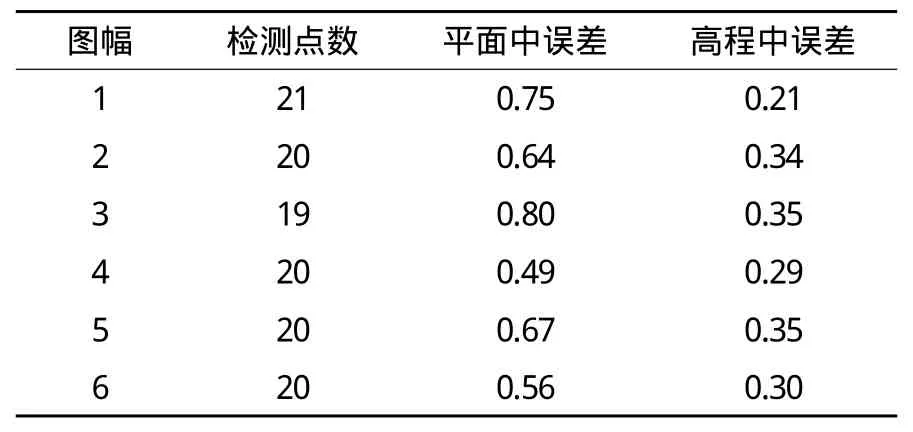
表1 加密点平面与高程中误差表/m
对于试验区6幅标准1∶10 000图幅精度检测,结果符合内业加密点对附近野外控制点的平面和高程中误差要求,因此空三加密成果符合生产1∶2 000数字正射影像精度的要求。
3 PixelGrid4.0在空三加密中的主要优点
试验表明,采用PixelGrid4.0进行空三加密主要有以下优点:
1)PixelGrid4.0空三加密采用多级多核并行处理方式,可多台机器同时进行空三处理,也可1台机器多核并行处理,大大提高了空三处理速度。
2)PixelGrid4.0空三过程中,采用基于RFM通用成像模型的先进算法,只需极少量的控制点就能满足空三加密的精度要求,大大减少了外业控制点的测量工作。
3)PixelGrid4.0采用基于尺度/旋转不变性特征的高精度多基线影像匹配算法,大大提高了匹配精度。
4)PixelGrid4.0提供断点继续处理的方式,避免了断电、死机等原因造成重新处理数据的问题,大大减少了工作量。
4 空三加密过程中的经验与体会
1)像控点的选取应严格控制在大比例尺DLG成果上,在满足规范的同时顾及内业加密的需要,选取易于判读的点位如小道路交叉口、田埂角、水泥地角等,而内业不易判准的围墙角根部,高差变化较大斜面上的目标以及界限不明显的地角等,应当尽量避免。
2)PixelGrid嵌入了POS(GPS/IMU)辅助空三加密模块,在中小比例尺成图过程中,用少量外业控制点即可满足加密精度要求,在大比例尺成图过程中,应用此模块可减少控制点的量测,从而提高成图的效率和节约成本。
3)在设置航带偏移点的过程中设置航带间的偏移应保证上下航带之间有至少一对同名影像点,偏移点分布是以上下航线的2头均匀分布,间隔10~15个影像为宜。
4)为使模型与模型之间、上下航带之间有足够的连接点,在自动提取加密点过程中加密点采用3×5个标准点位的方式进行连接点的选取,可删除一些错点和一些误差较大的点,减少计算量,提高平差精度。
5)在模型连接的过程中,由于某些模型的30重叠点被删除后失去连接,需对其补充模型连接点,如果平差后粗差仍超限,需人工进行微调而不是一味删除,某些不易调的点需在立体环境下进行微调。
6)在实际航空摄影过程中,由于种种原因,2个航带接边处经常会遇到重叠区域只存在5幅影像不足6幅或者个别影像模糊不清的情况,即旁向无60重叠区域,这时要尽量在这些影像中选取质量好的影像进行重叠区域控制点的选取。
5 结 语
本文采用PixelGrid4.0软件对襄阳城区东南的航摄成果进行空三加密处理,应用实践表明PixelGrid4.0软件与同类软件相比,满足同样的精度对控制点的要求较少,且自动选点、挑点速度快而准、大大减少了外业的测量工作和内业空三加密的工作量;在数据处理方面,PixelGrid4.0在相关步骤中可实现并行运算,大大提高了数据的处理速度。由于软件的自动作业模式,一键式的操作,可实现夜间无人作业,生产的主要工作全部由计算机完成,极大地解放了作业员的生产力。经试验发现,使用PixelGrid4.0软件进行空三加密相比其他传统遥感处理软件,其生产效率提高了2~3倍。
[1]贾鹏,李相庭,何军,等.SSK 空中三角测量技术应用初探[J].地理空间信息,2010,8(2):54-56
[2]董明,李和军,王攀,等.POS技术在平原地区1∶10 000 DLG生产中的外业控制点布设[J].测绘科学,2011,36(2):230-232
[3]北京四维空间数码科技有限公司.PixelGrid-A 高分辨率航空影像数据处理系统Version 4.0用户操作手册[R].
[4]王伟,周延萍,王睿.浅谈VirtuoZo AAT自动空中三角测量的几点体会[J].测绘与空间地理信息,2002,33(1):211-212
[5]Toni Schenk著,郑顺义,苏国中译.数字摄影测量学[M].武汉:武汉大学出版社,2009
[6]王彦敏,卢刚.基于PixelGrid实现DOM的快速更新[C].地理信息与物联网论坛暨江苏省测绘学会2010年学术年会,2010
[7]王佩军,徐亚明.摄影测量学[M].武汉:武汉大学出版社,2005
[8]耿迅,徐水平,龚志辉,等.ADS40线阵影像空中三角测量数据处理与精度分析方法[J].武汉大学学报:自然科学版,2011,36(2):776-779