基于A3航摄仪的小基高比影像连接点精提取技术研究
2020-08-14王艳利宁卫远
王艳利,宁卫远
(河南省煤田地质局物探测量队,河南 郑州 450000)
通过影像匹配获取影像间连接点用于空中三角测量是航空摄影测量流程中的关键步骤之一,然而面阵摆扫影像大多具有像幅较小、影像重叠度较低、不同视角间影像地物几何变形大、分辨率变化较大、地物间遮挡和光照变化差异等缺点,严重影响了影像匹配的效果,不利于面阵摆扫影像获取精确的影像间连接点[1-3]。A3航摄仪的双镜头设计克服了常规面阵摆扫相机影像重叠率低的缺点,300 mm长焦镜头使得相机可以获取超高分辨率的数字影像,以上两个优势可以使A3影像获取大量高精度匹配点[4-6]。就影像匹配而言,基于SIFT算子匹配方法的各种改进算法,在提高算法实时性的同时几乎都是以牺牲匹配精度为代价。本文针对SIFT特征匹配运算低时效性问题,使用CUDA并行处理技术提高影像匹配效率。随后对获取匹配点中存在的误匹配点,设计并使用NDM-ET (Normal Distribution Model-Elevation Threshold)方法进行删除,获取高精度的影像连接点后,提高平差解算效率,缩短迭代收敛所需时间,最后使用一种适用于A3影像冗余连接点剔除的方法对连接点进行采样处理。
1 A3航摄仪
A3航摄仪是以色列生产的新一代步进式分幅成像数字航摄仪,该相机具有长焦距和面阵摆扫成像的特点。该相机配备两个镜头在单个摆扫周期也可以获取两个扫描行图像,通过增加镜头数量从而避免了双程摆扫中镜头摆扫速度和角度控制所需的复杂技术。A3航摄仪单程摆扫成像原理如图1所示,图1中仅展现摆扫成像时单个摆扫周期。成像像幅对数量根据飞机飞行速度确定,单程摆扫成像时垂直于飞机飞行方向从右至左扫描成像,成像瞬间0号和1号相机同时曝光,图1中红色区域为两个镜头同时曝光成像时影像重叠区域。
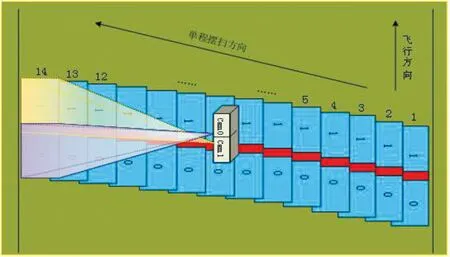
图1 A3航摄仪单程摆扫成像示意图
2 影像匹配点优化
使用基于SIFT特征的匹配算法虽然在处理影像有平移、旋转和仿射变换等复杂情况时表现较好,但最终获取匹配点进行空间前方交会时,部分影像连接点前交结果高程会出现明显错误[7-9]。返回图像对该类匹配点进行检查发现,利用SIFT特征匹配方法获取的匹配结果依然有误匹配点存在,因此还要对输出的匹配点进行二次筛选。
2.1 NDM-ET算法
本文采用一种将正态分布模型和高程抑制相结合,用于影像误匹配点删除的NDM-ET算法。该算法思想是首先对误匹配点进行基于正态分布模型的删除处理,然后依据A3单航带影像间小交会角的特性,使用设定高程阈值的方法对小偏移量误匹配点进行第二次删除。

(1)
试验数据中平面坐标所对应的差值数据均为18.5万个,对于大样本数据而言,多数误差通常集中在一个较小范围内,只有少量误匹配点差值相对较大且分布散乱。差值数据经过拟合分析后符合正态分布规律。
若样本总数为n,以地面坐标X差值数据为例,则对应期望和方差分别由式(2)计算:
(2)
根据3σ准则(又称拉依达准则),误差较小差值数据分布在(μ-3σ,μ+3σ)区间内的概率为0.997 3,依据该准则对地面坐标差值数据进行处理,被删除差值数据所对应像点坐标即为误匹配点。
对获取的匹配点使用3σ准则进行误匹配点删除后,对筛选后匹配结果抽样选取少量匹配点,返回图像中查看其匹配结果正确性,发现图像中依然有少量误匹配点存在。3σ判别方法只对数据中误差较大误匹配点进行剔除,在较小误差范围内依然存在匹配偏差较小的误匹配点。因此,为保证在进行平差时结果收敛至正确值,还需要进一步对误匹配点进行删除。
对匹配点前方交会结果进行观察分析可知:由于该航带内影像进行前方交会时一般交会角较小,因此前交地面点坐标高程值对误匹配点较为敏感。由于前方交会角较小,因此可以将摄站S1S2基线长近似为S2到光线S1A的垂线距离,若以误匹配点为例,在图2中表现为a、b为同名匹配点,b′、b″为误匹配点。其中,点b与b′在屏幕坐标系中的坐标分别为(748,2 340)和(670,2 386),依据像元尺寸和相机焦距等参数可近似计算出S2A与S2A′之间夹角(此时近似认为此夹角等于S2A与S2A″之间夹角)。依据以上参数进行计算,当影像间交会角最大为6.2°时,此时由式(3)计算得出AA″>AA′>90m。当交会角进一步缩小时,由正切函数性质可知,高程异常现象将会更加剧烈。
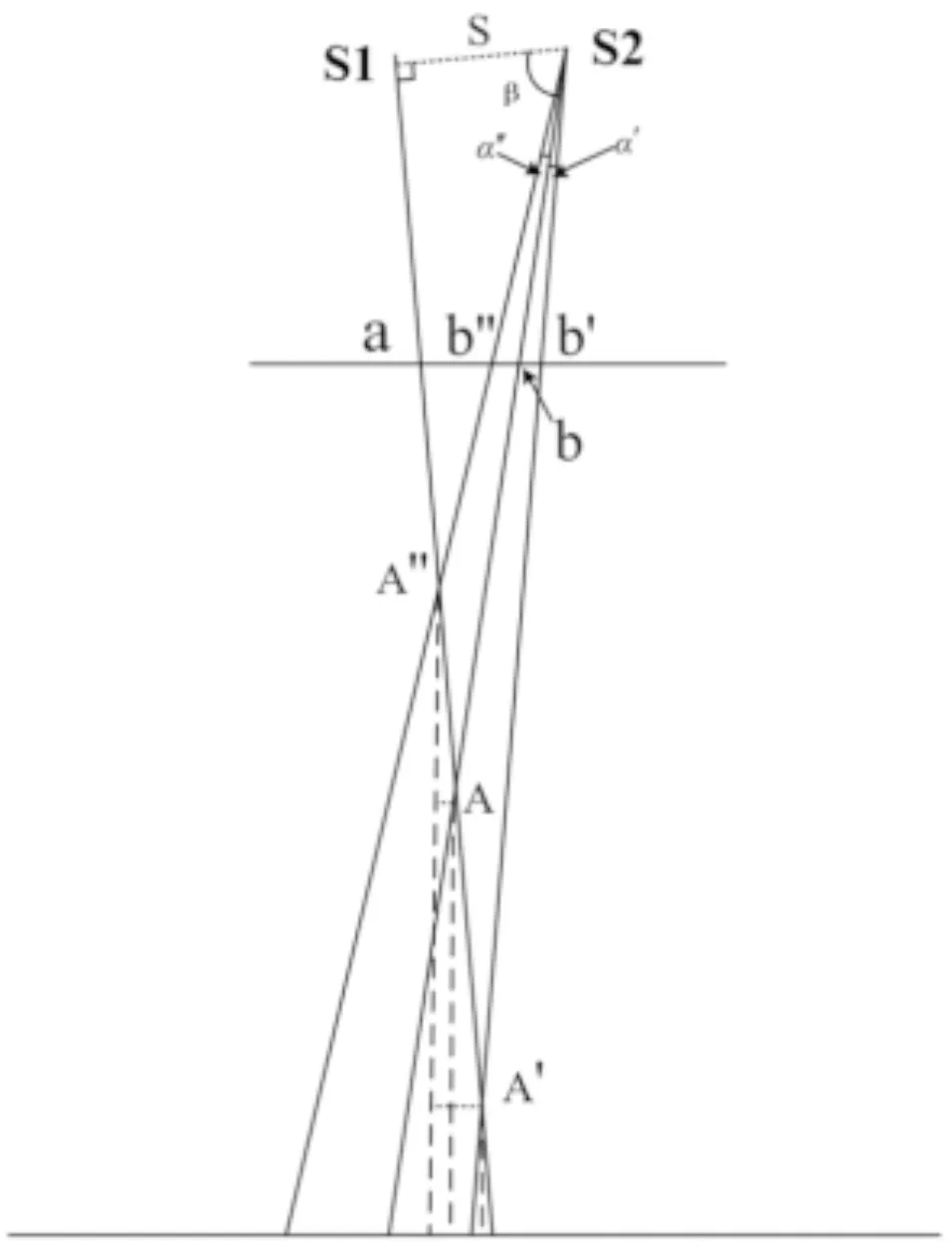
图2 误匹配点前方交会误差

(3)
该试验区域大部分地区高程起伏变化较小,一般情况下前方交会地面高程值变化较小。因此,针对单航带的A3影像数据,在出现类似小偏移误匹配点时,可利用高程出现明显异常的现象设定合理高程值作为阈值对误匹配点进行删除。使用NDM-ET算法对匹配点进行优化,使用由粗到精的误匹配点删除策略进行处理,最终可得到可信度较高的影像间连接点。
2.2 冗余连接点删除
在传统航空摄影测量作业时,一般完成对影像间连接点的提取和误匹配点的删除后即可将精化后连接点用于平差计算。对于面阵摆扫影像而言,在同一航高下可以获取比传统航空相机更大幅宽的等效影像,而等效宽幅影像最终是由许多小像幅影像拼接而成的。
进行基于A3影像的平差试验,当参与平差影像共126张时,若不进行冗余连接点删除,则参与平差连接点数共有41 000个。本机试验环境下,仅单次迭代计算所花费的时间就需以天为单位计算,对于4.32 m2面积试验区域而言,需要耗费如此大量时间进行平差计算不具有可行性。对影像内冗余连接点进行剔除时,可以使用将影像进行网格化划分的方法。而在对A3影像进行冗余连接点剔除时,使用该方法对连接点进行提取不具有可行性。
本文设计了一种按影像连接点数量对冗余连接点进行采样剔除的方法。剔除多余影像间连接点,缩短平差迭代计算所需时间,提高平差计算的效率。该方法流程如图3所示。
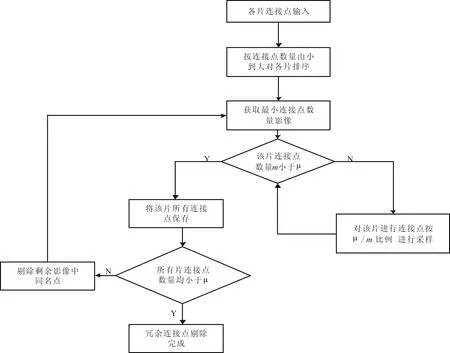
图3 冗余连接点删除流程
将各片连接点数据读入后,分别计算各片像点坐标个数,然后对冗余连接点进行删除,将参与平差影像按像点数量由少至多排序。设定每张影像匹配点个数的阈值为μ,若此时影像中连接点数量大于阈值μ,则按μ/m的比例对连接点进行删除。连接点在影像上的排列具有一定连续性,因此每m个点中选取μ个连接点即可,在删除当前影像连接点的同时,对其余影像中的同名点同时进行删除,直至影像内包含连接点数量小于阈值。若当前影像连接点个数小于μ,则保留当前影像所有连接点,其他影像上同名点同时也得到保存。重复此流程直至最后一张影像连接点个数小于阈值μ,则此时冗余连接点删除工作完成。
按此方法进行冗余连接点删除有以下优点:一是保证每张影像上都具有足够数量的连接点;二是保证删除后连接点在影像上尽量均匀分布;三是尽量保证多度重叠点不被删除。
3 匹配点优化试验与分析
3.1 试验环境
本文算法由C++(64bit)实现,试验机器配置为Intel(R) Core(TM) i5-6700HQ CPU(2.30GHz),内存16.0GB,Windows 10(x64)操作系统。
3.2 试验数据
试验区域选取大连市旅顺口区九头山至凤凰山沿海一带,影像数据为A3航摄仪单航带数据(strip),单条航带共包含23个摆扫周期(sweep),每个摆扫周期两个镜头均成像14幅,获得14对影像对(frames),最大摆扫角为22.9°。
3.3 误匹配点删除试验
由于无法对误匹配点删除后连接点一一验证其正确性,因此选择在剔除误匹配点后的连接点中利用随机函数选取25组数据为试验对象,并返回图像中对匹配点逐个进行正确性验证。在验证正确性后的像点中分别加入10个、20个和40个像元大小的误差,并分别进行前方交会计算各误匹配点地面坐标。将计算得到的地面点坐标高程值与无匹配误差点高程值进行差值运算,计算结果如表1所示。
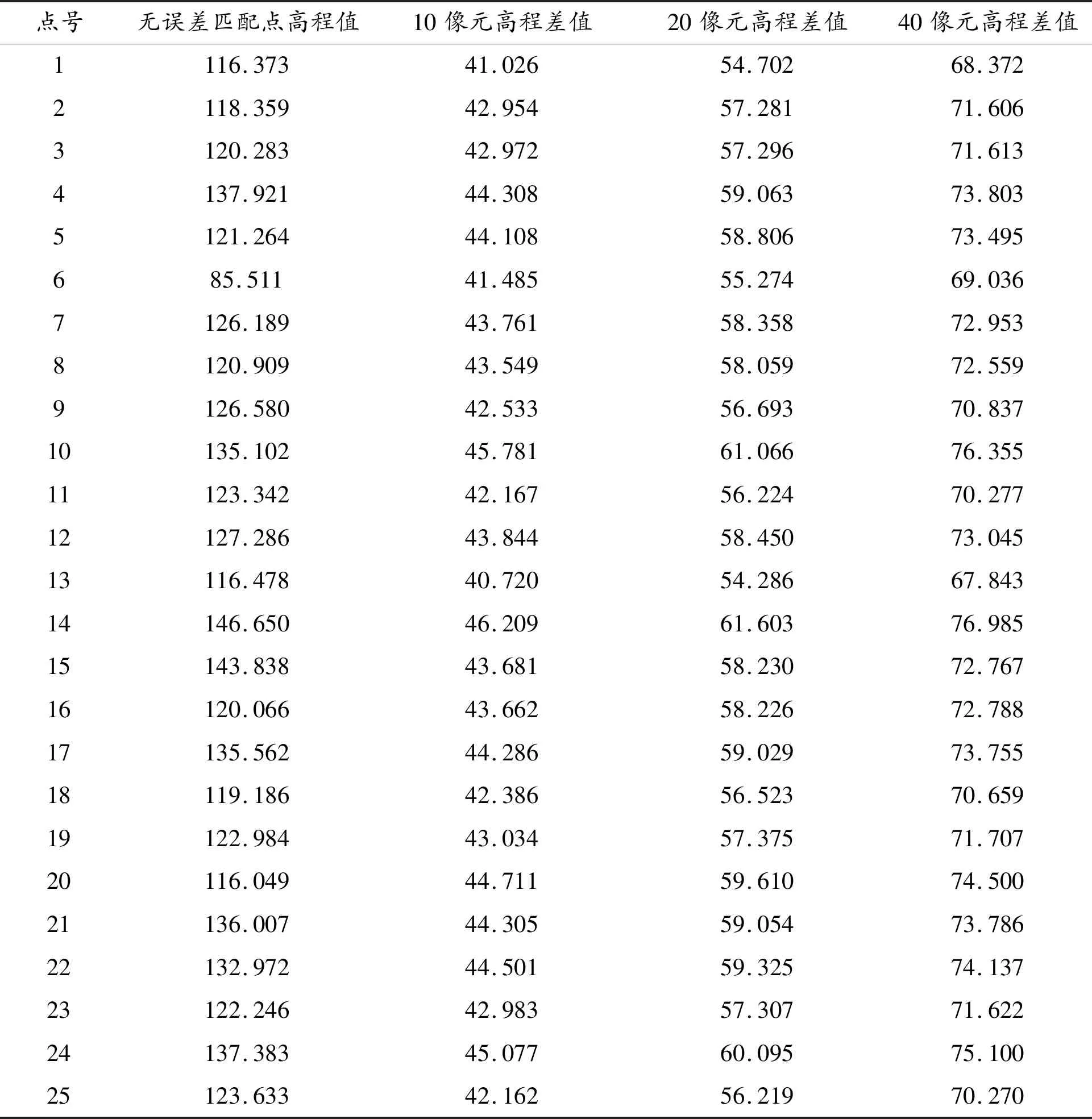
表1 误匹配点高程差值 m
对表1中数据进行统计分析,统计结果如表2所示。

表2 误匹配点高程差值统计
3.4 冗余连接点删除试验
完成对误匹配点的删除后即可获取高精度的影像间连接点,选取两个摆扫周期共56幅影像进行冗余连接点剔除试验。0号相机28幅影像试验处理结果如表3所示。
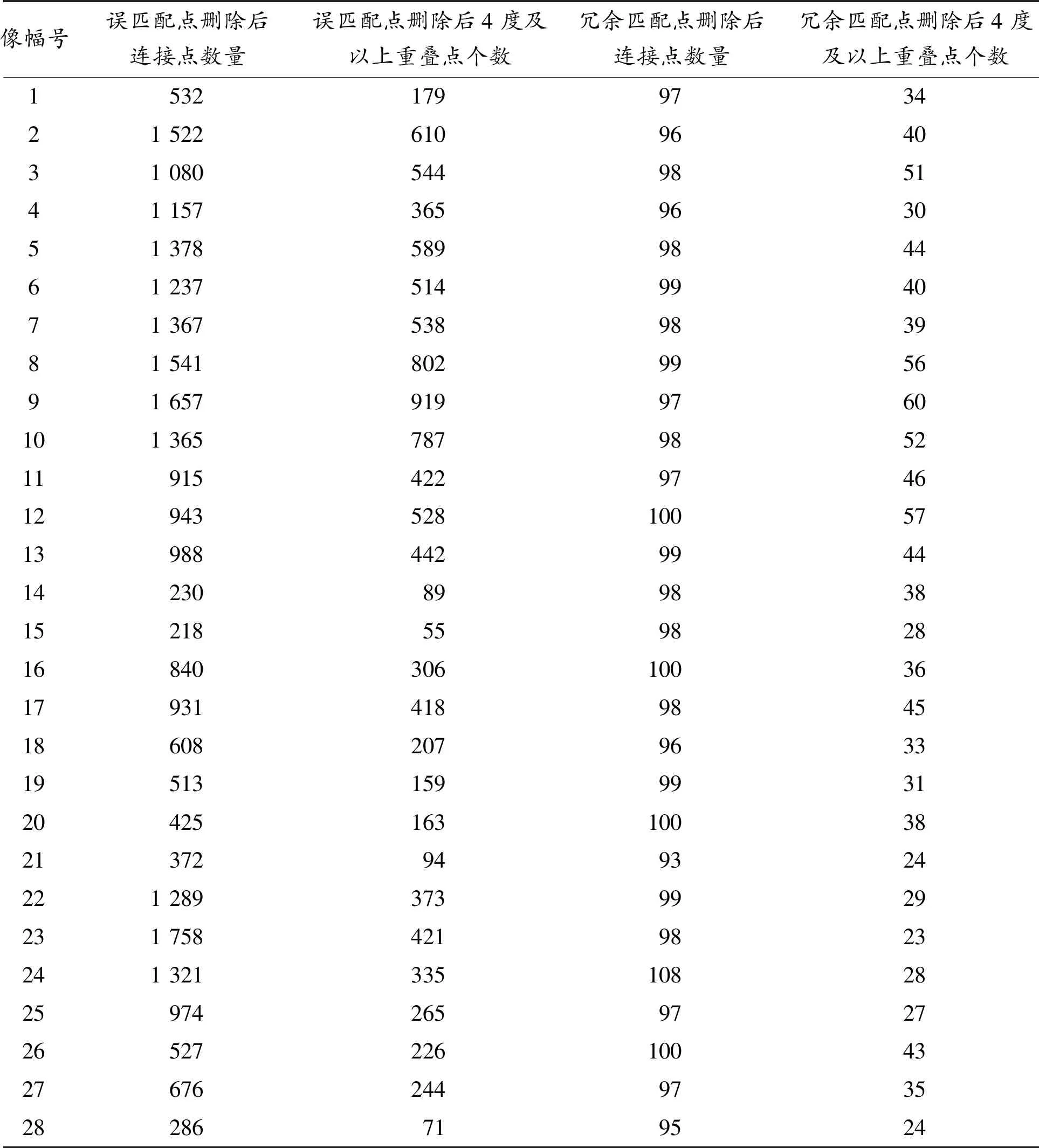
表3 误匹配点高程差值
3.5 结果分析
由表1可知:当匹配点中存在10个像元的误差时,高程误差达到40 m以上;当匹配点中存在20个像元误差时,高程误差达到55 m以上;当在匹配点中加入40个像元误差时,高程误差达到67 m以上。因此,对于小偏移量误匹配点,可根据高程误差大小对误匹配点进行删除。
对表2中统计项目数据进行分析可知:误匹配点高程差值数据标准差较小,证明该方法对误匹配点删除表现较为稳定,降低了对正确匹配点删除的可能性,且误匹配点偏移越大,高程误差越大。因此,设定合理高程值作为阈值可作为对小偏移量误匹配点进行删除的依据。
由表3可知:冗余连接点剔除处理后连接点的数量得到了有效控制,同时由4度以上重叠点的数量可以看出,冗余连接点剔除算法有效保留了多度重叠点的数量。因此,利用该算法对匹配点进行采样操作在保证平差模型连接的稳定性同时,可以有效提高平差计算的效率。
4 结论
为提供精度可靠、数量充分的影像间连接点用于平差计算,使用基于SIFT算子的匹配方法用于获取A3影像匹配点;针对所获取匹配结果中存在的误匹配点,利用NDM-ET算法对误匹配点进行删除,最终获取匹配精度较高的影像间连接点;平差计算时,由于部分影像内连接点过度冗余影响平差计算效率,提出了一种适用于A3单航带影像冗余连接点剔除的方法,在剔除多余连接点的同时,最大程度保证了每张影像连接点的数量和分布合理性。
