深水系泊定位控制系统的研究与实现
2013-09-20孙涛吴华强李浩高志民
孙涛,吴华强,李浩,高志民
(中国船舶重工集团公司第704研究所,上海 200031)
0 引言
随着陆地和近海油气的不断开采日渐减少,深海资源的开发成为各国能源领域争夺的焦点。国外深海平台的制造技术已达到第六代水平,深海平台的定位系泊系统市场几乎被国外垄断,如由西班牙奥斯坦诺船厂建造的“发现者深海号”;韩国三星船厂建成的“海军勘探者1号”;北爱尔兰Harland&Wolff船厂建造的“GLOMAR CR.LUIGS号”。
海洋油气开发和海洋工程装备的发展成为我国经济新的增长点,也直接影响着国家的能源安全。我国油气资源开发海域主要集中在近海,深海海洋工程技术研究仍处于初期阶段[1],与拥有国际先进技术的国家之间存在较大的差距。在系泊定位关键技术方面,国内相关研究单位已展开了动力定位和锚泊定位的研究,动力定位系统在深水作业时具有快速响应性,而锚泊定位系统在使用、维护、成本和安全性方面具有较强的优势,因此以下对锚泊定位控制系统展开研究。
1 深水定位系泊系统
深水定位系泊系统自动定位与仿真装置具有对模拟海洋平台运动的控制能力,均衡力场的分布,同时对各实物锚机和模拟锚机间能相互协调。
深水系泊自动定位实验与仿真系统中,通过中央控制台对一套实物锚机进行实际控制,且模拟对三套仿真锚机进行虚拟控制,同时采集海况和各个锚机工作参数,实时显示在控制台的人机界面上。深水系泊自动定位仿真系统建立锚链、平台、锚机、海况等动态模型,模拟三套虚拟锚机工作。
将锚机、平台、海况模拟发生装置的输出信号,作为建模相关输入,构造控制数学模型,通过系统的仿真分析与试验模型的验证,对海洋平台综合变化产生的响应,发出校正控制对策,实现平台的有效控制,使平台快速回到目标位置。
系统具有对模拟海洋平台运动控制能力,如图1所示,均衡力场的分布,同时对各实物锚机和模拟锚机间能相互协调。在进行多点锚泊自动定位作业时,及时分析处理检测信息,发出校正控制指令,实现各锚机锚索的收放,控制平台位置,使平台水平运动时偏离目标位置误差不大于工作水深的5%,以确保平台作业时的安全性。在控制过程中,环境载荷、海洋平台、各个锚机的各相关参数实时变化,可通过人机界面实现实时显示,供工作人员监视。
2 深水系泊自动定位控制系统
深水系泊自动定位控制分为中央控制和机旁控制两种方式。中央控制与现场控制通过现场总线进行信号传输,且中央控制的优先权高于现场控制。
2.1 中央控制
中央控制台采用人机界面(HMI)方式显示4台锚机(1台实物锚机,3台模拟锚机)的工作状态和实时海况,采用面板操作结合触摸屏操作方式对每个锚链进行中央操作。
HMI设备选择了触摸功能西门子MP377 15’液晶触摸屏,较大的显示画面可以更醒目的显示各锚链的状态信息便于操作人员实时监控,触摸功能可以方便操作人员在HMI设备上完成锚链的相应操作。HMI选用西门子公司专为触摸屏开发的组态软件 WinCC flexible[2-3],功能包括状态显示、系统设置、基本功能控制等。

图1 深水系泊自动定位试验与仿真系统

图2 多台系泊定位设备进行集中监控人机界面
2.2 机旁控制
机旁控制台的主要功能是实现对应实物锚机的运行控制和监测。当系统在自动工作模式时,机旁控制台的控制器根据中央控制台中的控制器发出的指令,对每台锚机实施控制,实现每台锚机的三链轮正转与反转,从而达到收、放锚链的目的。在手动模式现场工作模式有效时,通过操作机旁控制台对锚机的收、放锚链。当锚链承受的拉力达到最大值或收放速度超过安全阈值时,控制系统直接采取保护措施,发出报警信号,防止危险事故发生。当锚链承受的拉力达到最大值或收放速度超过可行阈值时,控制系统直接采取保护措施,发出报警信号,防止危险事故发生。
系泊系统信号采集与检测是集成在集中控制盘上的另一个功能。检测信号一部分为锚机装备工作状态和相关测量参数,另一部分为海洋平台和海洋环境状态和相关测量参数。
3 主监控系统设计
中央控制台对多台系泊定位设备进行集中监测,获取所有12根锚链的工作状态和实时海况,并将信息显示在中央控制台的人机界面(HMI)上。
在进行多点锚泊定位作业时,深水定位系泊系统自动定位与仿真装置用于实时准确地模拟环境及设备参数,及时分析处理后,向中央控制系统发出校正控制指令,实现各锚机锚索的收放,对平台水平运动控制在工作水深的5%以内,并能够快速回到目标位置,以确保平台的安全性。在控制过程中,环境载荷、平台、锚机的各相关参数的变化,实时在人机界面上显示。
当锚索承受的拉力达到最大值时,控制系统应采取保护措施,发出报警信号,防止危险事故发生。
如图2所示,状态监测分为五个区域,包括四个边角区域和一个中心区域。四个边角区域分别监测放置在平台四个边角的四台锚机,每个锚机包含三个绞盘。对应每个绞盘分别显示锚链压力,放出锚链长度和绞盘状态。锚链压力采用柱状图和数字两种显示方式,单位为吨(ton);放出锚链长度采用数字显示方式,单位为米(m);绞盘状态用来指示锚链是否处于停车状态,处于停车状态时,停车指示变为黄色。中心区域显示当前哪个锚链被操作、实时风况和锚机电机和液压泵的工作状态。被操作锚链对应的指示灯为绿色,风况显示风向和风速,处于工作状态的锚机电机和液压泵指示灯为绿色。
4 锚机监控系统设计
采用面板操作结合触摸屏操作的方式,通过中央控制台可以对单个锚机进行监测和操作,可以实现锚链选择、锚链模式选择、锚链速度选择、锚链收放、锚链紧急释放、海况检测、状态监控。
在选择和操作锚链之前,必须确认液压系统压力正常、两个液压泵和电机均已启动,即HMI上相应指示灯亮,否则,对锚机的其他操作均无效。锚链操作时,首先在面板上选择要操作的锚链,然后HMI上选择对应锚链的工作模式和速度,最后通过手柄操控锚链收放。面板上未被选择的锚链,HMI上的选择操作和手柄操作均无效。锚链操作过程中,实时监控锚链的工作信息,显示在相应锚链的对应位置。HMI显示的信息包括锚链状态(是否停车)、锚链放出长度(单位m)、锚链剩余长度(单位m)、锚链压力(单位ton)和锚链收放速度(单位m/min),实时监控的风况信息显示在HMI左上角。
5 自动定位控制
PLC控制系统采集现场各个传感器数据和一个实物锚机的运行状态、参数,通过RS422协议传输至仿真系统,仿真系统根据平台的控制目标,将三个模拟锚机和一台实物锚机进行分析、计算,发出校正控制策略,向个锚机实施控制。其控制原理如图3所示。

图3 深水系泊自动控制原理
为均衡12条锚链受力情况,防止某条锚链受力过大而引起的锚链断裂,进而环境载荷在余下的缆绳中重新分配又引起余下缆绳中受力最大的断裂直至全部缆绳断裂的严重后果的产生。应用遗传算法对锚链受力进行优化,并在保证满足平台定位精度要求的前提下,得出各锚链的均匀张力值,并将得到的张力值作为锚链切换的临界值。遗传算法的目标函数为:

将优化的结果作为锚链切换的依据,同时针对现有方案采用模糊控制同时对四根锚链进行收放控制。模糊控制的输入量分别为纵荡位移、横荡位移及艏摇角,输出量为锚链的收放速度。
当平台向x及y的正方向移动时,3号锚机(即7、8、9号锚缆)的锚缆进行收缆,以增加张力,1号锚机进行放缆运动,而2号、4号锚机的收放运动则根据纵荡和横荡位移偏差的大小,当纵荡偏差较大时,4号锚机收缆,2号锚机放缆。以此类推,总结实际经验并加以修正,得出表1中49条模糊语句。
模糊推理采用Mamdani方法[4-5],经模糊推理后需将模糊集合转化成清晰的数值来代表此模糊集合,即“反模糊化”。反摸糊化采用重心法,即求出模糊集合隶属函数曲线和横坐标包围区域面积的中心,选这个中心对应的横坐标值,作为这个模糊集合的代表值。

表1 模糊控制规则表
模糊控制规则反映了当前平台纵荡及横荡偏差情况下,四台锚机的协调控制规律。以平台艏向为正,艉向为负,沿x方向为纵荡方向,沿y方向为横荡方向,锚链布置如下图4所示。
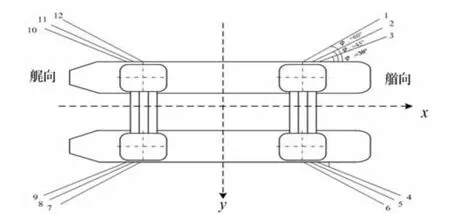
图4 深水系泊锚链布置图

图5 采用锚泊定位的平台位移
针对一年一遇工作工况下的环境条件,考虑风、浪和海流方向相同的最不利的情况,取600 s的计算时间,得到在1 500 m水深及 135°浪向角时,采用传统锚泊定位的平台分别对有无锚索阻尼的情况进行仿真,仿真结果如图4、图5所示,将平台位移的理想值设为14 m,在控制系统作用下,平台的位移见图6。
6 结束语
在深水系泊自动定位控制试验系统中,对自动控制定位算法进行了研究,并设计了具有自检性、报警和保护功能的中央控制、机旁控制和监视系统,可快速高精度实现深水系泊系统的自动定位,能够提高作业人员工作效率和平台工作的安全性、可靠性,对我国大型海洋工程技术的发展具有重要意义。
[1]孙涛,桂文彬,俞志刚.半潜式平台定位系泊控制试验系统设计与应用[J].船舶工程,2012,35(2):84 -86.
[2]西门子触摸屏选型样本手册[M].北京:西门子有限公司自动化与驱动集团,2008.
[3]王宁,吴利涛.深入浅出西门子人机界面[M].北京:北京航空航天大学出版社,2009.
[4]闻新,周露,李东江.MATLAB模糊工具箱的分析与应用[M].北京:科学出版社,2001.
[5]吴晓莉,林哲辉.MATLAB辅助模糊系统设计[M].西安:西安电子科技大学出版社,2002.