UUV声纳浅海声信道频率特性分析
2013-09-19邓新文叶浩亮
邓新文, 叶浩亮
UUV声纳浅海声信道频率特性分析
邓新文, 叶浩亮
(中国人民解放军91388部队, 广东湛江, 524022)
多途效应和混响是浅海声信道最为突出的2个特点, 它们会造成水下声信号传播畸变, 严重影响信号分析和检测。基于此, 利用非消声水池试验展现了水下信道多途效应会造成信号频谱展宽, 引起水下声纳信号检测性能下降的特点, 通过理论分析并依据湖海试数据表明, 运动声纳的近场混响具有强非平稳性, 点谱展宽会更加明显, 但随着时间推移, 混响的多普勒展宽将会变小, 所以不能利用基于平稳性假设的混响模型算法来抑制混响。本文的研究可为声纳抗多途、抗混响以及声纳在水下航行器上的应用提供参考。
水下航行器; 水声信道; 多途; 混响; 多普勒展宽
0 引言
对水下环境的研究, 在水下资源探测、渔业、海洋环境检测、军事对抗及无人水下航行器(unmanned underwater vehicle, UUV)使用环境等方面都有极为重要的意义和应用价值。由于海洋特殊的自然环境条件, 水声信道具有极为复杂的时-空-频变、强多途、强噪声、强混响等特性, 浅海尤其如此。我国浅海辽阔, 资源丰富而有着极其重要的国防和经济意义, 浅海水声信道一直是水声研究的重点, 其中多途效应和混响干扰是浅海声信道最为突出的2个特点。
由于海底和海面的粗糙性, 使得发射声信号经过海底海面多次反射后经过多种路径汇聚于接收点, 这种现象称为声信道的多途效应。信道的多途效应必然引起信号的多径衰落, 文献[1]分别用射线理论和简正波理论分析了浅海中的多途效应。
混响是存在于海洋中的大量无规则散射体, 对入射声信号产生的散射波信号在接收点叠加而形成的。混响按其来源可以划分为体积混响、海底混响和海面混响3类, 其中海面混响和海底混响统称为界面混响, 是浅海混响的主要成分。混响是水下航行器主动探测设备的主要干扰之一, 严重限制了声纳的作用距离和参数估计性能。为了提高信号处理增益, 提高主动探测设备的性能, 对水下航行器环境下声纳工作时产生的混响进行定性和定量评估是一件十分必要的工作。一直以来, 混响特性和抗混响技术等方面都是水声信号处理的重点, 国内外许多学者对此进行了大量研究。Urick详细论述了海洋混响的基本理论以及海底、海面和体积散射特性。奥里雪夫斯基从概率分布、自相关函数和时空相关函数等统计特性对混响进行了分析和研究。中科院声学所提出了能较好地解释及预报混响强度随时间振荡现象的射线简正波相干混响理论。哈尔滨工程大学和715所在混响模型仿真和抗混响技术等方面也做了大量研究工作。
本文从多途效应和混响干扰2个方面分析了浅海声信道的频率特性, 指出了多途效应会造成信号频谱展宽, 引起水下声纳信号检测性能下降, 同时分析说明了运动平台混响频谱随着时间逐渐变窄的现象, 为声纳抗多途、抗混响和数据处理技术的研究以及声纳在水下航行器上的应用提供了重要参考。
1 多途频域展宽
1.1 水池试验
为了研究水下多途的频率特性, 在1个水温恒定的非消声水池中模拟简单双基地声纳收发系统。
假设水下航行器携带了主动发射换能器, 与接收换能器分别在水池两端, 均位于水深3 m处, 声线轨迹见图1。以某一个发射角度为例, 信号从发射换能器发出后, 经过直接路径、发射换能器→水面→接收换能器、发射换能器→水底→接收换能器、发射换能器→水面→水底→接收换能器、发射换能器→水底→水面→接收换能器等路径, 多径效应非常明显。图1中右边框上圆圈范围内的声线为本系统主要接收到的多途数据。
试验中, 发射换能器发射25kHz的连续波(continue wave, CW)信号, 接收换能器接收一段数据并截取其中任意3个路径的接收数据。
1.2 水池试验结果及分析
将各段数据作FFT观察其频谱特性如图2所示。可以发现接收数据的不同段对应频率不同, 即使是直达波数据片段1同样有了频移。这是由于发生前向散射的不同介质有着不同的频移, 而且各个路径的相移不同, 最终导致水声信道的频率扩展。
2 混响频域展宽
从上节中对水池数据的分析可以知道, 由于池底、池壁及水面是粗糙的, 接触面的垂直移动对入射波的振幅进行了调制, 并将自己的谱作为上边带和下边带叠加到入射声波的频谱上, 从而导致混响出现频域展宽。而如果声源是运动的, 则由于多普勒现象导致的频域展宽将更加明显, 说明水下航行器在浅海环境航行过程中, 其声纳发射的声波频域将被展宽, 对接收信号检测带来不利影响。
2.1 静止声纳混响
要促进赣南客家灯彩文化的发展,首先要具有完善的管理部门,并且对市场进行正确分析,使灯彩文化既保留传统的文化气息,又与现代文化相结合。
图3为某次湖上试验中静止声纳的时频谱(前7个窗混响很强, 为了更好地观察混响频谱展宽的变化, 将这部分的幅度缩小5倍)。
2.2 水下航行器航行过程中声纳混响
考虑如图4的一般情况, 声纳基阵是1个平面阵, 其轴向与基阵运动方向夹角为。
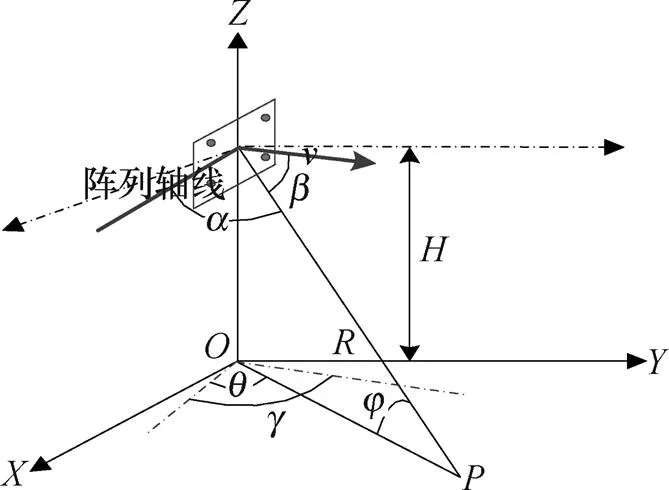
图4 散射元与声纳坐标轴
假设距离基阵为处的散射元为, 与基阵的垂直距离为, 方位角为, 俯仰角为, 波束指向锥角为, 且。和足够大, 可以忽略基阵尺寸。是基阵运动方向与散射元之间的夹角, 决定了该散射元的频移大小。
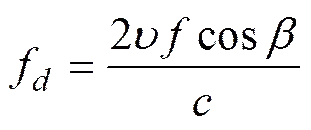
由图中几何关系可得
(2)
所以式(1)等效于
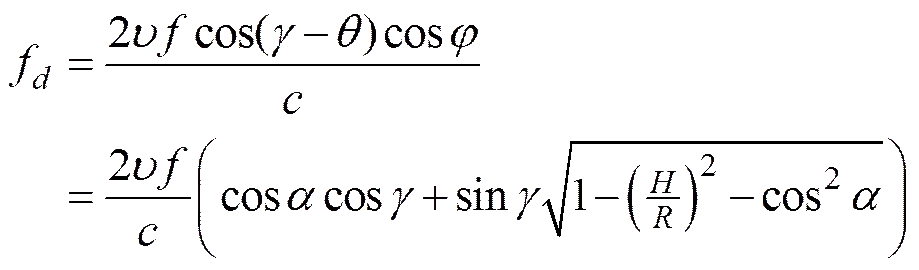
某一时间点的混响是该时刻返回基阵的所有散射单元散射成分的叠加,取值在0~之间, 而应为基阵到海底深度和到海面深度的最大值。当, 即正侧面阵的时候, 混响谱频移为, 扩展宽度为0, 其他情况必然都存在扩展宽度。
2.3 仿真结果及分析
假设海底均匀平坦, 等声速剖面, 水下航行器声纳位于水下40 m处, 海深100 m, 发射信号频率25 kHz, 运动速度为20 m/s,, 考察不同锥角下随着距离变化多普勒频移发生的变化, 如图5和图6所示。其中, 图5中3条曲线的前端无值是因为尚未有声线碰到海底。
由于界面混响是浅海混响的主要成分, 对于海面和海底混响, 时间越大,越大,越大, 则展宽越小。所以随着时间推移, 单基地声纳接收到的混响成分来自于距声纳距离更远处, 主要成分——界面混响的最小频移散射单元变小,增大, 最小频移随之增大, 多普勒频移展宽变窄。并且由图5和图6的曲线可知, 近距离处的混响频率变化很快, 非平稳性很强。
2.4 湖海试结果及分析
图7和图8分别是湖海试数据2段脉冲, 水下航行器声纳是一个收发合一的声纳, 声纳在发射一段脉冲之后接收数据。
可以发现在声纳工作频带内, 没有收到混响频带以外的具有明显频率-时间特征的环境噪声, 并且混响谱的宽度随着时间推移而变窄, 符合前文的分析。这是水下航行器航行过程中声纳固有的现象, 该现象对空时处理的性能影响很大。事实上, 大多数利用混响模型抑制混响的算法都是基于平稳性假设, 而对于水下航行器运动载荷声纳的混响则不满足该假设。因此, 所有利用前段混响数据训练建模对后段数据仿真的算法都将失效。比如基于径向基函数神经网络的前后向预测模型, 以及分段AR预白化模型等。
3 结束语
多途效应和混响干扰是浅海声信道的2个重要特性。本文通过水池试验研究了水声信道多途频率展宽的特点, 通过湖海试数据处理结果, 得出运动声纳的近场混响具有强非平稳性, 随着时间推移, 混响的多普勒展宽变小, 并对此做了较深入的理论分析和解释。研究表明, 水下航行器运动载荷声纳的混响不满足平稳性假设, 所以不能利用基于平稳性假设的混响模型算法来抑制混响。
本研究对于水下航行器声纳的探测功能具有重要意义, 为声纳抗多途、抗混响技术研究和声纳在水下航行器上的应用和数据处理技术提供了重要参考。
[1] 朱埜. 主动声纳检测信息原理.北京:海洋出版社[M], 1990.
[2] 奥里雪夫斯基. 声纳统计方法[M].武延祥, 黄建国, 译.北京: 国防工业出版社, 1984.
[3] 尤里克. 水声原理[M]. 洪申, 译. 哈尔滨: 哈尔滨船舶工程学院出版社, 1990.
[4] 李风华, 金国亮, 张仁和. 浅海相干混响理论与混响强度的振荡现象[J]. 中国科学, 2000, 30(6): 559-566.
[5] 葛凤翔, 惠俊英. 界面混响信号的仿真研究[J]. 电子与信息学报, 2001, 23(12): 1291-1297.
Ge Feng-xiang, Hui Jun-ying. Research on the Interface Reverberation Simulation[J]. Journal of Electronics and Information Technology, 2001, 23(12): 1291-1297.
[6] 王新勇. 宽带多频动目标检测[D]. 哈尔滨: 哈尔滨工程大学, 2000.
[7] 葛凤翔. 智能诱饵中“边收边发”技术研究[D]. 哈尔滨: 哈尔滨工程大学, 1999.
[8] Guccione, Pietro. Beam Sharpening of Delay/Doppler Altimeter Data Through Chirp Zeta Transform[J]. IEEE Transactions on Geoscence and Remote Sensing, 2008,46(9): 2517-2526.
[9] Farooq A. Optimal Trajectory Regulation for Radar Imaging Guidance[J]. Journal of Guidance, Control, and Dynamics, 2008. 31(4): 1076-1092.
[10] Cox, Henry. Space-time Processing for Suppression of Bottom Reverberation[M]. in Proceedings of Asilomar, 1996.
[11] 姜可宇, 蔡志明, 陆振波. 海底混响中基于前后向预测模型的信号检测[J]. 电子学报, 2007. 35(9): 1766-1769.
Jiang Ke-yu, Cai Zhi-ming, Lu Zhen-bo. Forward and Backward Prediction Model Based Signal Detection in Sea Bottom Reverberation[J]. Acta Electronica Sinica, 2007, 35(9): 1766-1769.
(责任编辑: 杨力军)
Frequency Characteristics Analysis of Shallow Water Acoustic Channel for UUV Sonar
DENG Xin-wen, YE Hao-liang
(91388Unit, The People′s Liberation Army of China, Zhanjiang 524022, China)
To improve the detection performance of underwater unmanned vehicle (UUV) sonar, the frequency characteristics of shallow water acoustic channel is analyzed. Shallow water acoustic channel is more complex than blue water acoustic channel. Due to multipath effect and reverberation, the propagation of acoustic wave is often deformed, resulting in degradation in signal detection performance of sonar. The frequency characteristics of underwater acoustic channel are analyzed with the data from tank experiment, lake and sea trials. Tank experiment shows the spread of signal frequency spectrum due to multipath effect. The data from lake and sea trials show that for the high-speed active sonar, the short-range reverberation is highly non-stationary, and the spread of point spectrum becomes more obvious. But the Doppler spread decreases with time. Therefore, the reverberation model algorithm based on stationarity assumption cannot be used to suppress the underwater vehicle sonar reverberation.
underwater unmanned vehicle(UUV); acoustic channel; multipath; reverberation; Doppler spread
TJ630.34; TN911.7
A
1673-1948(2013)03-0184-05
2012-11-2;
2012-12-17.
邓新文(1969- ), 男, 高级工程师, 研究方向为水声测试技术.