双基阵节点被动测距方法实验研究*
2015-03-15孟彧仟张自丽葛辉良
刘 流 孟彧仟 张自丽 葛辉良
(1.海军装备部驻上海地区军事代表局 上海 201206)(2.杭州应用声学研究所 杭州 310023)
双基阵节点被动测距方法实验研究*
刘 流1孟彧仟2张自丽2葛辉良2
(1.海军装备部驻上海地区军事代表局 上海 201206)(2.杭州应用声学研究所 杭州 310023)
采用方位交叉定位方法,利用两个声基阵节点的测向结果实现水中噪声源的被动测距。为抑制测向随机误差引入的测距误差,对双节点基阵测向结果先进行最小二乘拟合平滑处理,以及对解算的目标距离作滑动平均后置处理。海上实验结果表明,该方法能够得到稳定的目标定位结果。
双节点基阵; 被动定位; 最小二乘拟合; 后置处理
Class Number TN911.72
1 引言
被动测距是声纳系统的一项主要功能,单个基阵被动测距方法主要有三类[1~3]:一类是基于波前弯曲的被动测距方法,如三子阵定位法和聚焦波束形成方法;第二类是基于海洋波导声传播模型的被动测距方法,最典型的是匹配场算法;第三类是目标运动分析方法。单基阵被动测距往往对阵元位置测量精度、水文参数、平台机动等有特定要求,提高单基阵被动测距的精度和宽容性仍是需要努力解决的技术难题。
当声纳系统中配有多个间距达数百米以上的声基阵时,则可融合声基阵独立测得的目标方位信息实现被动测距。其中,方位交叉定位基于各基阵独立测得的方位信息、基阵间距,通过三角函数关系式计算目标距离。和其它方法相比,方位交叉定位对信号形式、信号相关性、海洋水文参数等无特别要求,宽容性好。
本文对双基阵被动测距进行实验研究。为提高测距精度和稳定性,在方位交叉定位法的基础上增加了预处理和后置处理。即通过三步实现双基阵被动测距: 1) 对两个基阵测得的目标方位结果进行最小二乘拟合平滑处理; 2) 然后利用三角运算解算目标距离; 3) 对目标距离解算结果进行滑动平均后置处理。
2 双节点基阵被动测距基本原理
双基阵被动测距原理如图1所示。设1#声基阵、2#声基阵中心距为L,和阵中心连线的夹角分别为β、γ。设噪声源S离声基阵距离满足单条基阵的远场条件,则对于单基阵声波前可近似为平面波[8],可利用平面波束形成估计目标方位。设两条声基阵测得的噪声源S方位(相对于基阵阵首)分别为θ1、θ2,则利用三角函数关系式,可以解算声源S离两条声基阵的距离[9~10]:
(1)
式中,
α1=θ1-β,α2=π-θ2-γ
(2)
双基阵被动测距方法对声源位置有一定限制。当声源S和基阵距离远大于L时,α1+α2趋向于π,式(1)分母趋向于0,微小的测向误差将引起很大的测距误差;当α1+α2=π/2,式(1)分母趋向于1,测向误差的影响最小。

图1 双基阵被动测距原理
3 单基阵测向结果预处理
由于噪声、海洋环境起伏等因素的影响,单基阵测得的目标方位角呈现不同程度的随机变化。当目标较远时,为抑制目标方位角微小变化引起的双基阵测距结果较大幅度摆动,需要首先对单基阵测向结果进行平滑滤波处理。较常用的方法有卡尔曼滤波方位,但该方法常会因测向结果中的野值导致发散。考虑到远处目标的方位变化是缓慢的,在短时间内可认为是线性变化,因此,可采用一定时间窗内方位值的线性最小二乘拟合处理实现测向结果的平滑。平滑处理后的瞬时方位值为

(3)
式中,N为时间窗内包含的数据点数,a、b为最小二乘拟合系数:
(4)
式(4)中各系数表达式为
(5)
4 双基阵测距结果后处理
单基阵测向结果平滑处理后,有利于减小双基阵测距结果的方差,但双基阵测距结果仍有可能出现较大的离散性,甚至出现野值。因此,有必要对双基阵测距结果进行后置处理,以减小随机误差。
用于减小数据离散性的方法主要有滑动窗平均、中值滤波、卡尔曼滤波等方法,其中,滑动窗平均方法简单且无需考虑阈值和初始值,也不存在发散问题,适用于已通过预处理抑制方差的双基阵测距结果的后处理。
设双基阵方位交叉测距结果为ri,其中,下标i为数据点序号,则滑动窗平均处理后的测距结果为
(6)
5 海上试验验证
为了验证上述算法,在距岸约1km的海底固定布放两条32元、阵元间距为0.7m光纤水听器线列阵,基阵布设具体位置如图2所示。两条线列阵夹角为140.6°,基阵中心距为453.3m。

图2 基阵布放示意图

序号位置1距离(km)位置2距离(km)14.7510.8824.7510.6234.759.8744.749.7054.749.9664.739.6374.739.6984.729.8194.7210.38104.7210.11目标实际距离4.9810.70均方误差0.250.75相对误差5%7%
为验证双基阵测距方法,试验船依次在位置1(18°14.24′N,109°8.9′E)和位置2(18°14.22′N,109°3.72′E)锚泊,离1#线列阵中心的距离分别为4.98km和10.7km。在每个位置,试验船布放声源到水下20m,发射宽带噪声信号。两条线列阵接收信号分别进行平面波波束形成和抛物线插值实现对目标测向,并利用本文双基阵测距方法对声源位置实现连续测量。处理结果见表1、图2、图3,由图表可见,对两个位置处的声源均能实现稳定测距。当声源距离为4.98km时,测距平均误差为5%;当声源距离为10.7km时,测距误差为7%。
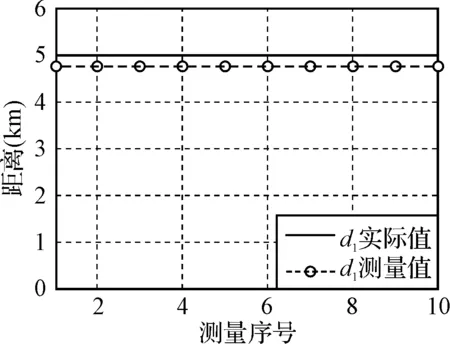
图3 目标位置1测距结果

图4 目标位置2测距结果
6 结语
本文对双基阵被动测距方位进行了算法改进和实验研究。为抑制测向随机误差引起的测距随机误差,对单基阵测向结果先经过最小二乘拟合平滑处理,并对方位交叉测距结果进行了滑动窗平滑处理。试验表明,对于阵间距约为400m的两条线列阵,对距阵约5km的声源测距可达到5%的精度,对距阵约10km的声源测距可达到7%的精度,验证了双基阵被动测距方法的有效性。
[1] 毛卫宁.水下被动定位方法回顾与展望[J].东南大学学报(自然科学版),2001,31(6):129-132.
[2] 宋新见,惠俊英,殷冬梅,等.水下噪声目标被动测距技术研究[J].应用声学,2005,24(3):133-139.
[3] 时洁,杨德森,刘伯胜,等.基于MVDR聚焦波束形成的辐射噪声源近场定位方法[J].大连海事大学学报,2008,34(3):55-58.
[4] 王振文,宋志杰.双阵被动测距方法仿真[J].火力与指挥控制,2005,30(1):33-34.
[5] 张小凤,赵俊渭,王荣庆,等.双基地声纳定位精度和算法研究[J].系统仿真学报,2003,15(10):1471-1473.
[6] 关欣,何友,衣晓.双基阵纯方位水下被动目标跟踪性能仿真分析[J].系统仿真学报,2003,15(10):1464-1466.
[7] 徐本连,董学平,王执铨.双基阵纯方位目标跟踪的抗野值算法研究[J].东南大学学报(自然科学版),2004,34(增刊):199-203.
[8] R.J. 尤立克.水声原理[M].洪申译.哈尔滨:哈尔滨船舶工程学院出版社,1990:80.
[9] 田坦.声呐技术[M].哈尔滨:哈尔滨工程大学出版社,2010:138-140.
[10] 周伟,门丽杰,梅继丹.浅海三元阵近程被动定位实验研究[J].哈尔滨工程大学学报,2009(5):547-551.
Experiment on Bi-static Array Passive Ranging Method
LIU Liu1MENG Yuqian2ZHANG Zili2GE Huiliang2
(1. Shanghai Military Representative Bureau of Navy Equipment Department, Shanghai 201206) (2. Hangzhou Applied Acoustic Institute, Hangzhou 310023)
By use of bearing cross location method, the range of underwater noise source can be estimated from the bearing results of two bi-static array. To reduce the random ranging errors, the input bearing results are smoothed by use of the least squares fitting pretreatment, and the estimated target range results are smoothed by use of moving average post processing. It is shown from experiment results at sea, the stable target ranging results can be obtained by use of the method.
bi-static array, passive ranging, least squares fitting pretreatment, post process
2014年10月17日,
2014年11月27日
刘流,男,工程师,研究方向:装备监造、管理。孟彧仟,男,工程师,研究方向:水声工程。
TN911.72
10.3969/j.issn1672-9730.2015.04.016
