基于能量分析的馈能式主动控制系统设计*
2013-09-17宋鹏云张继业陈彦秋王鹏
宋鹏云 张继业 陈彦秋 王鹏
(西南交通大学牵引动力国家重点实验室,成都 610031)
基于能量分析的馈能式主动控制系统设计*
宋鹏云†张继业 陈彦秋 王鹏
(西南交通大学牵引动力国家重点实验室,成都 610031)
提出了一个馈能式主动控制系统的设计方案,首先给出了一种馈能式主动控制的电机作动器的驱动方式,使得作动器能够在三种工作模式下进行功能切换.其次,分析了三种模式的工作时间比与能量平衡之间的关系,给出了能够实现能量平衡的基本条件,并得到了系统达到能量平衡的条件.最后,通过一个馈能式主动控制系统设计的算例验证了方法的可行性.仿真结果表明,该主动控制系统能够有效降低振动激励的干扰,并且能够达到能量平衡,即不需要外部的能量供给.
能量回馈, 主动控制, 能量平衡, 电机作动器
引言
振动主动控制是指在振动控制过程中、根据所检测到的振动信号,应用一定的控制策略,经过实时计算,进而驱动作动器对控制目标施加一定的影响,达到抑制或消除振动的目的.
该技术已经成功地应用于机械设备、航空航天、土木工程以及交通运输工程等领域[1].直线电机由于结构简单便于控制,不需要进行转动与直动的转换的优点,可以用于振动主动控制系统[2].J.Allen将直线电机用于车辆主动悬架系统的实验[3].Seungho Lee 等在 J.Allen 的基础上,进行了一系列主动悬架系统的控制算法实验[4].主动控制具有较好的减振效果,同时也需要消耗大量外部能源,使其应用受到限制,能量回馈是解决主动控制高能耗的有效手段.对此,国内外学者进行过一些列研究.Nakano K.等构建了自供能量式振动主动控制系统,利用直线电机作动器实现了振动抑制和能量回馈[5-6].喻凡等将馈能式振动主动控制应用于车辆隔振,对车辆的馈能式主动悬架系统进行了可行性分析[7].欧阳冬等[8-10]分析了能量回馈式主动悬架系统控制算法以及能量平衡条件,并进行了仿真实验.
文献[6]中,通过在直流母线中串联不同阻值的电阻,用调整母线电流的方式间接调整作动器输出力,但阻值的不连续破坏了输出力的精确度.文献[8-10]中给出的能量平衡条件较为复杂.文献[5-10]没有分析作动器各种工作模式的时程比例对能量回馈的影响,也没有给出具体的作动器驱动策略.针对这些问题,本文做了进一步的研究.介绍了主动控制系统结构以及直线电机作动器的基本原理.为了分析作动器各工作模式时程与能量回馈的关系,给出了对不同模式的工作时间分析.通过对系统的能量平衡分析,给出了一个更为简单的能量平衡条件.利用PWM调节母线电流的方式,调整作动器的输出力大小,并给出了详细的驱动策略.最后通过一个算例验证了方法的可行性.
1 作动器工作原理
双边型直线电机结构如图1所示.当电机的三相绕组A-X,B-Y,C-Z,通入三相对称正弦电流时产生气隙磁场.磁场的分布情况可以看成沿直线方向呈正弦形.当三相电流随时间变化时,气隙磁场将按顺序沿直线平移,因此被称为行波磁场.电机动子与行波磁场的移动速度一致.假设定子位置固定,取动子运动方向左为正方向.
利用DC/AC三相全桥式逆变器作为驱动,采用三相六状态电子换向策略,这意味着在同一时刻电机总是有两相导通.若绕组的电流通入方向为⊕-⊙,则称电机A相正向导通;若绕组的电流通入方向为⊙-⊕,则称电机B相反向导通.代表A相正向导通,同时B相反向导通,其他同理.
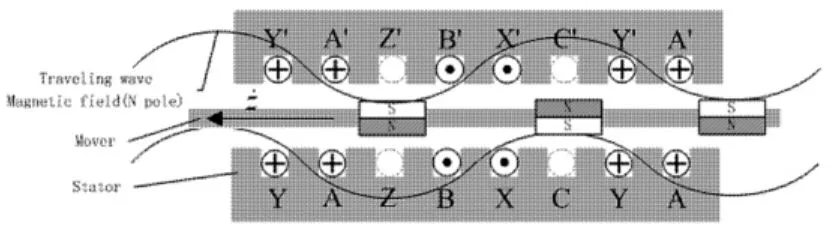
图1 直线电机工作原理Fig.1 Working principle of linear motor
1.1 作动器工作模式
当直线速度为z时,电机感应电压为ei,电枢电流为i,电机作用力f,它们之间的对应关系为:

φ被称为电机常数.当电机电枢在受外力驱动时,会输出一个阻尼力:

其中r为电枢电阻.记

被称为电机的等效阻尼系数.当直线电机两端电源电压为ep时,作动器输出力为

此时电源消耗功率为

忽略z≠0的情况,定义模式变量γ[6]为*

其中f*为作动器期的期望控制力.
当0<γ<1时,Ec为负值,表明作动器接收悬架能量并传递到电源,即作动器作为一个发电机回收振动能量,同时输出阻尼力.这种工作模式称之为“回馈模式”.
当γ≤0时,Ec≥0,作动器通过电源传送能量到悬架.称该模式为“驱动模式”.
当γ≥1时,Ec≥0,作动器接收来自悬架和电源的能量,能量消耗在了电枢电阻上.在由电源供应能量的作动器上产生一个大的阻尼力.称该模式为“制动模式”.
1.2 作动器驱动策略
γ≤0时,作动器作为电动机工作,不回收能量.直流电源电压为ec,τ为PWM(脉冲宽度调制)信号的占空比,作动器输出为:

为了得到输出f*,对应的PWM占空比为:

当τ>1时,电机作用力达不到期望值f*.令τ=1当τ>1,使得输出尽可能接近f*.其中

σ时,电机绕组导通顺序为,对应的全桥电路开关闭合顺序为(AH,BL)→(BL,CH)→(CH,AL)→(AL,BH)→(BH,CL)→(CL,AH)→(AH,BL).
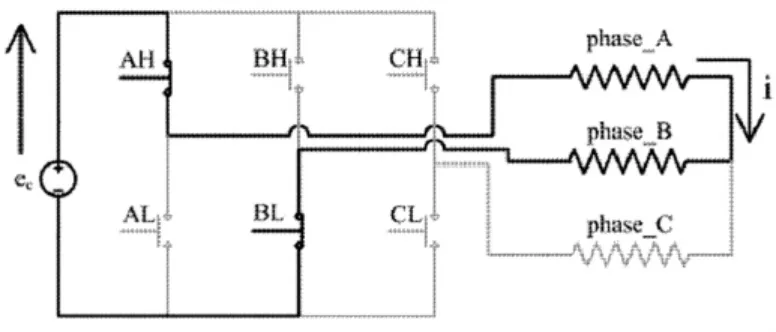
图2 γ≤0、σ=1时的电路(A B)Fig.2 Electric circuit when γ≤0,σ =1
σ=-1时,电机绕组导通顺序为,对应的全桥电路开关闭合顺序为(BH,AL)→(AL,CH)→(CH,BL)→(BL,AH)→(AH,CL)→(CL,BH)→(BH,AL).

图3 γ≤0、σ=-1时的电路Fig.3 Electric circuit when γ≤0,σ = -1
当ec<φ·|z|时,电流将由作动器流向电源.为了避免这种情况,断开电源与作动器之间的电路.作动器无输出.
时0<γ<1,作动器在产生阻尼力的同时回收能量.作动器输出力同式(8).为了产生期望输出f*,对应的τ同式(9).
σ=1时,电机绕组导通顺序为,对应的全桥电路开关闭合顺序为(AL,BH)→(BH,CL)→(CL,AH)→(AH,BL)→(BL,CH)→(CH,AL)→(AL,BH).
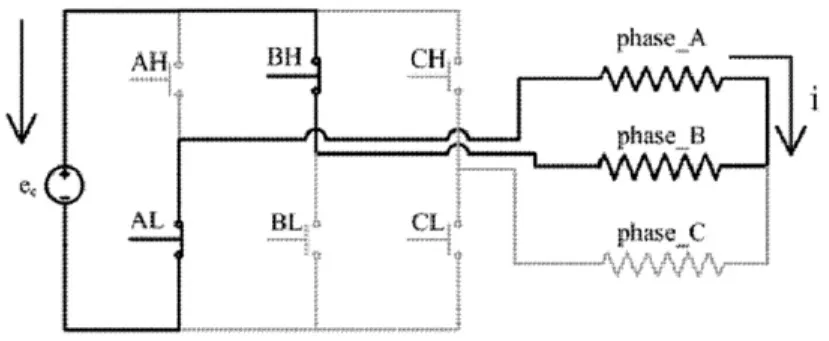
图4 0<γ<1、σ=1时的电路Fig.4 Electric circuit when 0< γ <1 ,σ =1
σ=-1时,电机绕组导通顺序为,对应的全桥电路开关闭合顺序为(BL,AH)→(AH,CL)→(CL,BH)→(BH,AL)→(AL,CH)→(CH,BL)→(BL,AH).
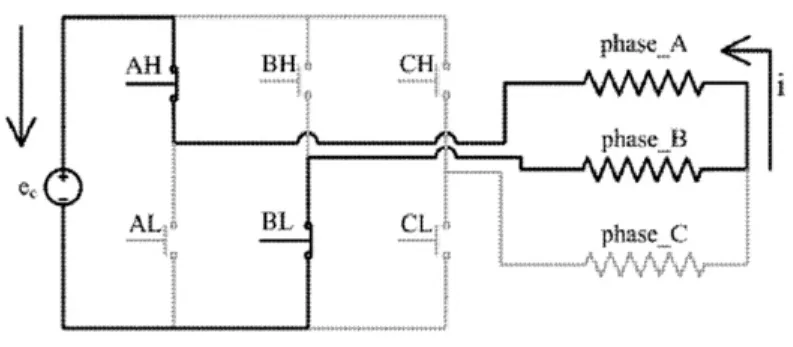
图5 0<γ<1、σ=-1时的电路Fig.5 Electric circuit when 0<γ <1 ,σ = -1
当τ<0时(如图5所示),作动器不能得到期望输出.此时作动器停止回收能量,仅作为阻尼器工作,通过可变电阻调整期望输出.作动器输出为:

此时τ的值为:

σ=1时,全桥电路开关闭合顺序为(AL,BL)→(BL,CL)→(CL,AL)→(AL,BL)→(BL,CL)→(CL,AL)→(AL,BL).
σ=-1时,全桥电路开关闭合顺序为(BL,AL)→(AL,CL)→(CL,BL)→(BL,AL)→(AL,CL)→(CL,BL)→(BL,AL).
当γ≥1时,作动器工作在制动模式.在该模式下,为了得到大输出力,作动器利用电源能量增大自身的阻尼力.作动器输出为:

为了产生f*,对应的τ为:

当τ>1时,电机作用力达不到期望值f*,令τ=1,使得输出尽可能接近f*.
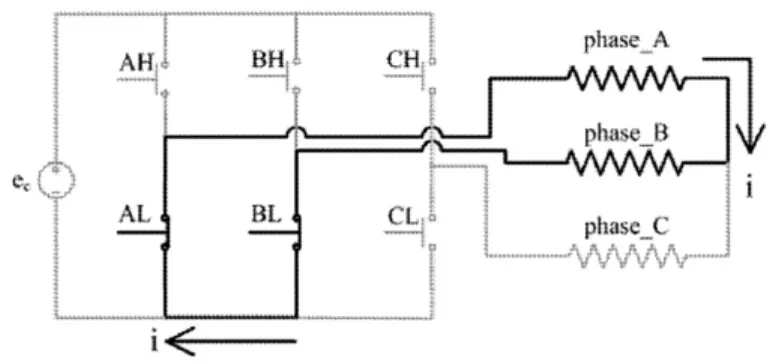
图6 0<γ<1、τ<0时的电路Fig.6 Electric circuit when 0<γ <1 ,τ<0
σ=1与σ=-1时电路状态与“驱动模式”时相同,绕组接通顺序与全桥电路开关闭合顺序同驱动模式相同.
2 作动器能量分析
2.1 时域能量分析
作动器工作在三中模式下,其中只有“回馈模式”能够回收能量.每种模式下工作时程的长度影响着能量的回收与消耗的多少.为了找到决定工作模式的因素以及工作模式与能量回收之间的关系,有必要对工作模式的时程进行分析.
由模式变量(9)的形式可知,γ的选择取决于z与f*.γ≤0时,作动器作为电动机工作,需要消耗能量.只有当模式变量γ>0时,作动器作为发电机工作,才具有回馈能量的可能.为了方便研究f*方向与z方向之间的关系,定义一组指标[12]:
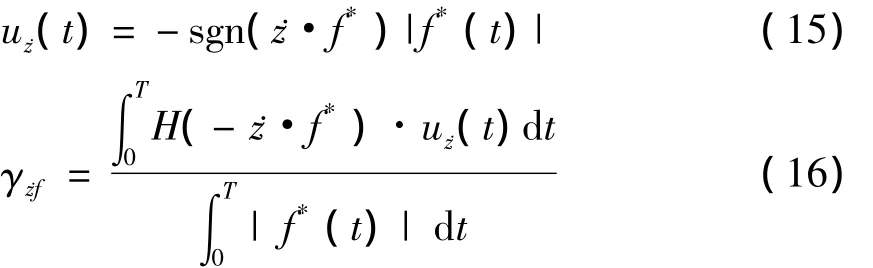
其中,T是系统运行时间,sgn(x)为符号函数,H(x)为单位阶跃函数.式(15)反映的是期望控制力与作动器直线速度方向的关系,式(16)是目标作动器直线速度方向与期望控制力方向相反的控制力时程占整个控制力时程的比例.
如果在运行时间t≤T上,总有uz(t)≥0,则γzf=1,作动器直线速度方向总是与期望控制力方向相反,作动器完全作为发电机工作,此时模式变量总有γ>0.若总有uz(t)<0,则γzf=0,作动器完全作为电动机工作,不具备回收能量的可能.因此,作动器在多大的程度上作为发电机工作,从而在多大程度上具有能量回馈的可能,取决于期望控制力f*的时程在多大程度上与作动器直线速度z方向相反,即取决于γzf的具体值.当γzf在[0,1]范围内取值时,γzf的具体值可看作是衡量作动器具备回收能量可能程度的指标,也可以作为控制算法设计的指标之一.
模式变量γ>0时,作动器作为发电机工作.作动器输出为

其中cf为可调阻尼系数,体现控制器的反馈增益.图7为作动器工作在回馈模式(0<γ<1)下f与f*的关系曲线.当z确定时,作动器能够输出的最大阻尼力为fmax=|ceq·z|.该模式下,|f*|>fmax时,f不能跟踪f*.为了跟踪期望输出,作动器将工作在制动模式下(γ>1),制动模式电源会消耗能量.由以上分析可知,若作动器的等效阻尼系数ceq足够大,使得ceq≥max(cf),则作动器总能够工作在回馈模式下.为了描述方便,引入指标:
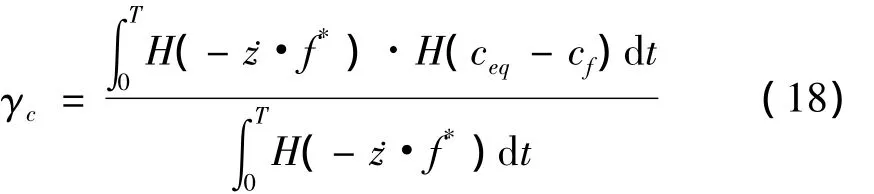
γc的值反映了0<γ<1的时程占γ>0时程的比例.
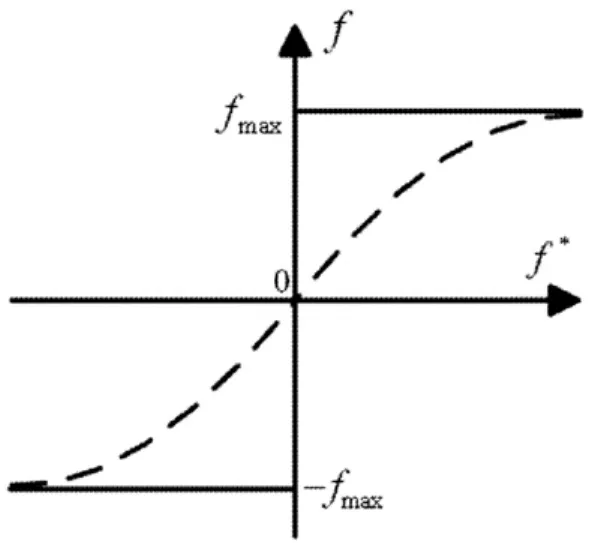
图7 回馈模式下作动器输出曲线图Fig.7 Actuator output in regeneration mode
图8为各工作模式在z为x轴、f*为y轴的相平面图上的区域分布.阴影部分为回馈模式区域,ceq的值越大,回馈模式的工作区域越大.若满足ceq>max(cf),回馈模式区域为整个二、四象限.指标γzf反映作动器在二、四象限区域工作时程占整个工作时程的比例,指标γc反映了作动器在阴影部分工作时程占在二、四象限区域工作时程的比例.指标γzf与γc的乘积为回馈模式工作时程占整个工作时程的比例.假设振动输入具有某统计特性,并且作动器作为电动机与阻尼器时能量转换效率相等.那么,至少要满足条件

系统回收的能量才有可能多于消耗能量.
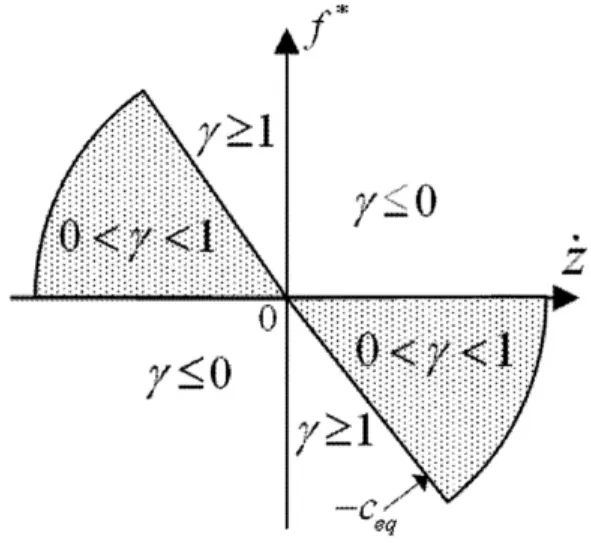
图8 工作模式区域分布Fig.8 Area distribution of working mode
2.2 频域能量分析
电源回收的能量多于消耗能量时,被称为能量平衡,此时电源能耗为负值<0).馈能式主动控制系统的目的在于将能量以振动的形式转化为电能.有必要研究系统的结构对能量的转换的影响.包括两个方面的内容,一是对电源平均能耗的估计,二是系统参数不确定对能量平衡的影响.
当作动器作为阻尼器工作时,主动控制力为

其中cf为可调阻尼系数,体现控制器的反馈增益.为了便于研究,假定当作动器作为电动机工作时,作动器能够输出负阻尼(cf<0).
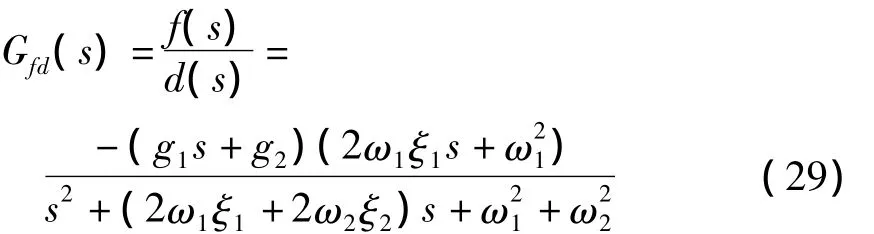
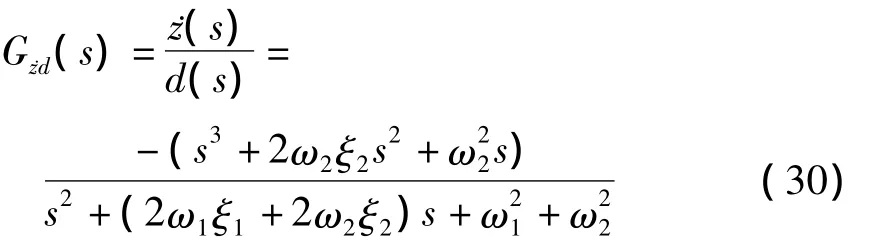
由式(6)可得作动器作为阻尼器时的电源消耗平均功率:


上式表示为:Gfd(jω)为作动器输出到激励输入的频率特性,Φfd(ω)为其相角;Gzd(jω)为作动器直线速度到激励输入的频率特性,Φzd(ω)为其相角;D0(ω)激励输入的功率谱.以上各值需要根据特定系统的特性求取.
令Ez<0,则可得
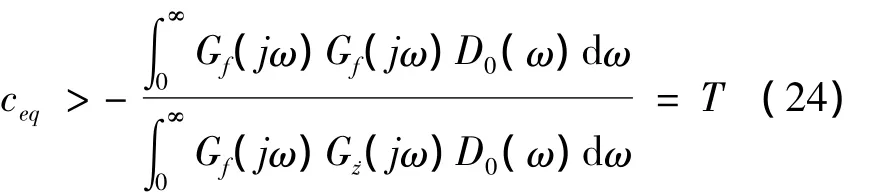
电机作动器的选取符合上式的要求,则可以保证能量平衡.
3 算例
选取单自由度馈能式振动主动控制系统结构,如图9所示.m为被控对象质量,d为振动位移,k与分别为振动源与控制目标之间结构的刚度与阻尼,直线电机M安装在控制目标与振动源之间,作为馈能式主动控制的作动器,作用在于输出垂直方向的控制力f以减小振动d对m的影响,同时将振动能量转化为电能进行储存.
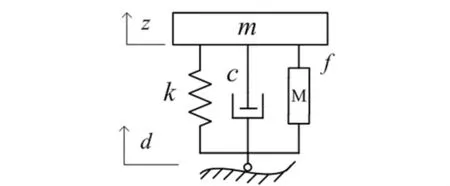
图9 馈能式主动控制系统模型Fig.9 System model of the self- powered active control
根据牛顿第二定律建立动力学微分方程:

直线电机直线速度为

假定控制输入能够完全跟踪期望值,并具有以下形式:
式(25)改写为:

通过计算,得到:
根据式(24)得到,能量平衡条件为:ceq≥25.6.取ceq=30.电源消耗的功率谱 ε(ω)·D0(ω)的频率分布见图10.根据式(20)得到电源消耗的平均功率=-0.0453,系统满足能量平衡条件.

图10 作动器能耗功率谱Fig.10 Power spectrum of actuator energy consumption

图11 控制效果对比Fig.11 Comparison of with and without control
用直线电机作为作动器,输出力根据上述控制策略得到,仿真时间20s.如图11所示,馈能式振动主动控制可有效降低振动幅度,振动位移峰值降低了约0.1m.根据式(16)以及式(18)得到指标γzf=0.6038,γc=0.8492,可估算出“回馈模式”的时程百分比为51.27%.图12为作动器相对速度与实际作动器输出力的关系,可以看出采样点更多分布在二、四象限.经统计,采样点在“驱动模式”、“制动模式”以及“回馈模式”区域内分布的比例分别为31%、11%以及58%,见图13.电源共消耗能量-0.9732J.
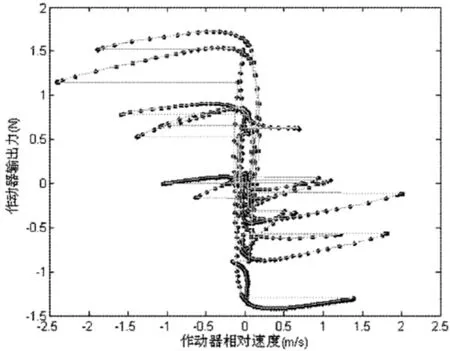
图12 作动器相对速度与作动器输出力的关系Fig.12 Relative velocity and output force
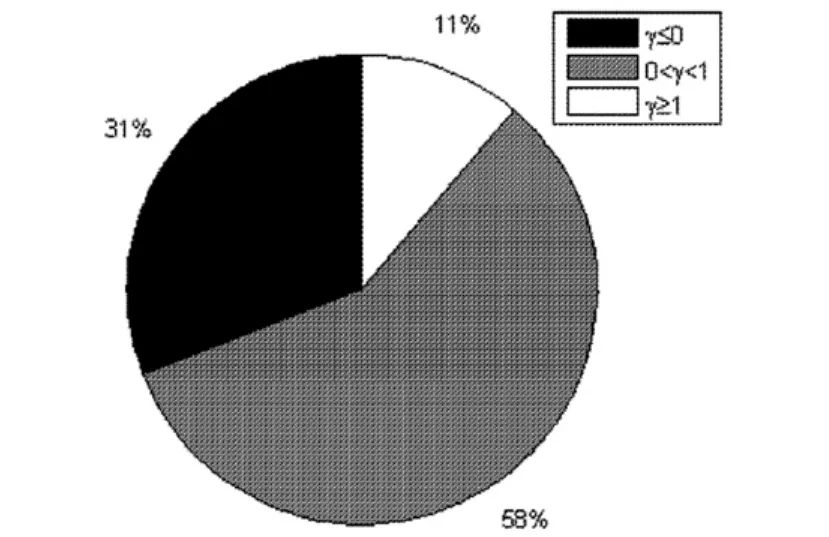
图13 三种模式的工作时间比例Fig.13 Proportion of working hours in three modes
4 结论
本文介绍了馈能式主动控制系统的设计方法,并通过一个算例证实方法的正确性:
(1)介绍了直线电机作动器的工作原理,给出了作动器在三种工作模式下的控制方法.
(2)介绍了作动器在时域和频域下的能量分析方法,给出了能量平衡条件估算方法.
(3)通过一个算例,证实了方法的可行性.
1 孙国春,史文库,田彦涛.振动主动控制技术的研究与发展.机床与液压,2004,(3):1~6(Sun G C,Shi W K,Tian Y T.Research and development in active vibration control technology.Machine Tool&Hydraulics,2004,(3):1~6(in Chinese))
2 Kim W J,Murpht B.Development of a novel direct-drive tubular linear brushless permanent-magnet motor.International Journal of Control,Automation,and System,2004.2(3):279~288
3 Allen J.Design of active suspension control based upon use of tubular linear motor and quarter-car model.Master’s Thesis,Texas A&M University,2008
4 Seungho Lee,Won-jong Kim.Active suspension control with direct-drive tubular linear brushless permanent-magnet motor.2009 American Control Conference Hyatt Regency Riverfront,St,Louis,MO,USA,2009,10-12
5 Nakano K,Suda Y,Nakadai S.Self-powered active vibration control with continuous control input.JSME International Journal.Series C,Dynamics,Control,Robotics,Design and Manufacturing,1999,43(3):726~731
6 Nakano K,Suda Y,Nakano S.Self-powered active vibration control using single electric actuator.Journal of Sound and Vibration,2003,260(2):213~235
7 喻凡,曹民,郑雪春.能量回馈式车辆主动悬挂的可行性研究.振动与冲击,2005,24(4):27~30(Yu F,Cao M,Zheng X C.Research on the feasibility of vehicle active suspension with energy regeneration.Journal of Vibration and Shock,2005,24(4):27 ~30(in Chinese))
8 欧阳冬,张继业,张卫华.能量回馈式主动悬架研究.机械与电子.2008,2(1):7~10(OuYang D,Zhang J Y,Zhang W H.Self-powered active suspension for vehicle.Machinery and Electronics,2008,2(1):7 ~ 10(in Chinese))
9 欧阳冬,张继业,张卫华.铁路车辆自供能量横向主动悬挂研究.交通运输工程学报,2008,8(1):15~18(OuYang D,Zhang J Y,Zhang W H.Self-powered active lateral suspension system of railway vehicle.Journal of Traffic and Transportation Engineering,2008,8(1):15 ~18(in Chinese))
10 欧阳冬,张克跃,张继业,张卫华.车辆能量回馈式主动悬挂系统研究.振动与冲击,2008,27(8):88~92(OuYang Dong,Zhang K Y,Zhang J Y,Zhang W H.Self-powered active suspension for Vehicle.Journal of Vibration and Shock,2008,27(8):88 ~92(in Chinese))
11 Rajesh Rajamani.Vehicle Dynamics and Control.New York:Springer 2006:287~354
12 欧进萍.结构振动控制-主动、半主动和智能控制.北京:科学出版社2003:421~486(Ou J P.Structural vibration contro.Beijing:Science press 2006:287~354(in Chinese))
*The project supported by the National Science Foundation of China(11172247,60974132,50823004)
† Corresponding author E-mail:songpy23@gmail.com
SELF-POWERED ACTIVE CONTROL SYSTEM DESIGN BASED ON ENERGY ANALYSIS*
Song Pengyun†Zhang Jiye Chen Yanqiu Wang Peng
(State Key Laboratory of Traction Power,Southwest Jiaotong University,Chengdu610031,China)
A self- powered active control system was designed.First,a kind of drive mode of motor actuator for self- powered active control was given,so that the actuator can work in three modes and switch functions.Second,the relationship between proportion of working hours and energy balance was analyzed,and the basic conditions to achieve energy balance were given,then the conditions of the system energy balance were obtained.Finally,the feasibility of the method was verified by a designed self-powered active control system.The simulation indicates that the active control system can effectively reduce the interference of vibrational excitation,and the energy balance of the system is achieved,which means that the control system does not require an external energy supply.
self-powered, active control, energy balance, motor actuator
23 April 2012,
29 June 2012.
10.6052/1672-6553-2013-014
2012-04-23 收到第 1 稿,2012-06-29 收到修改稿.
*国家自然科学基金资助项目(11172247,60974132,50823004)
E-mail:songpy23@gmail.com