摆杆约束往复活塞式压缩机动平衡设计分析
2013-09-13肖容美
肖容美
(五邑大学 机电工程学院,广东 江门 529020)
0 引言
往复活塞式压缩机因其活塞存在往复运动而派生出较大的往复惯性力,是造成压缩机振动及噪声的一个主要根源,同时也是影响压缩机工作可靠性的重要因素[1,2]。在小型空气压缩机领域,为了追求小的体积,两极电机取代四极电机的高速化已成潮流,随着转速的成倍增长,往复惯性力造成的负面影响越发突显,对其进行平衡势在必行。为了提高无油压缩机的使用寿命,最近出现了一种摆杆约束型往复活塞式空气压缩机[3~6],与传统机型相比,由于它增设了一个作摆动运动的摆杆机构,因此压缩机的振动特性更加复杂,不仅存在活塞连杆组件的往复惯性力,而且还存在摆杆机构的摇摆惯性力,如果继续沿用惯常的动平衡经验对往复惯性力进行平衡消减,将很难获得好的减振效果。鉴此,本文以该类型压缩机作为研究对象,探讨在复合有摆杆摇摆运动的情形下采用过量平衡技术减低压缩机敏感方向振动强度的最优布局方案。
1 摆杆约束型压缩机简介
图1为摆杆约束往复活塞式压缩机的结构示意图[4]。区别于传统摇摆往复活塞式压缩机,该机型增设了一个摆杆机构,此时曲柄销不再直接驱动连杆,而是通过一个驱动杆去驱动摆杆,接着再由摆杆去驱动连杆作往返运动,从而达成压缩机工作腔容积的周期性改变。

图1 摆杆约束往复活塞式压缩机结构示意图Fig.1 The swing-rod restrained type reciprocating piston air compressor structure diagram
新型压缩机的特点是,在摆杆的约束下活塞连杆组件以近乎直线往返的方式进行工作,由此减少了连杆相对于气缸轴线的摆动幅度,亦即意味着减少了活塞对气缸的拍击强度,这样一来既降低了压缩机的机械噪声,特别地还提高了密封环的使用寿命和工作可靠性,而这正是当前摇摆往复活塞式压缩机急需解决的瓶颈问题。
2 摆杆约束型压缩机动平衡分析
2.1 动平衡布局方案
与传统摇摆往复活塞式压缩机相比,摆杆约束往复活塞式压缩机由于摆杆机构的存在,因此具有更加复杂的运动机构和振动特性:一方面在铅垂方向,活塞连杆组件派生的往复惯性力导致压缩机出现 “上串下跳”的振动现象;另一方面在水平方向,摆杆机构产生的摇摆惯性力又使得压缩机出现 “水平绕圈”的运动趋势。经验告诉我们,沿铅垂方向的振动对安装在压缩机上的仪表装置及控制系统具有更大的破坏性,因此必须严格加以限制。
众所周知,往复惯性力的平衡通常需要设置专门的平衡轴来实现,但其结构非常复杂。出于简化,本文采用过量平衡法对其进行平衡消减,亦即在曲轴上布置平衡质量超过旋转惯性力所需平衡质量的平衡块,利用其产生的过量离心惯性力派生的沿气缸轴向方向的分力对付活塞连杆组件产生的往复惯性力。鉴于摆杆机构存在摇摆惯性力的事实,所置平衡块的大小、位置和方位均与传统做法有所不同。

图2 摆杆约束往复活塞式压缩机动平衡布置图Fig.2 The swing-rod restrained type reciprocating piston air compressor dynamic balance model
2.2 动平衡设计计算
图3为摆杆约束往复活塞式压缩机的机构简图,其中x为活塞自上止点下移的位移,与之对应的是曲柄销从极限位置Ⅰ转过角度α、摆杆转过角度β。假设压缩机旋转质量mr产生的离心惯性力为Fr、平衡块质量mp产生的离心平衡力为Fp、活塞连杆组件质量mL产生的往复惯性力为Fj、均质摆杆质量mb产生的摇摆离心惯性力为Fb。图3 中的rp为平衡块的旋转半径、φ为相对于曲柄销的角度方位。
本文计算涉及到的参数有:电机转速n=2890r/min,连杆的长度L=90mm,摆杆的长度Lb=90mm,摆杆的摆臂半径R=62mm,摆臂的旋转轴心与气缸轴线的距离H=88mm,驱动杆的长度Lk=50mm,曲柄的半径r=9.25mm,连杆的质量mL=0.13kg,摆杆的质量 mb=0.268kg,等效离心旋转质量mr=0.21kg,其中驱动杆的质量用等效质量替代:曲炳端的质量并入离心旋转质量、摆杆端的质量并入摆杆质量。本文利用软件Matlab 编制相应的计算软件,将上述参数代入后即可计算出相关的离心惯性力为Fr、离心平衡力为Fp、往复惯性力Fj和摇摆离心惯性力Fb,通过调整相应的参数即可寻找出较优的平衡块质量mp及其布局角度方位φ。为简化起见,计算中略去摆杆的摇摆惯性力矩。
图4为只进行曲柄销离心惯性力平衡而未对往复惯性力进行平衡时,压缩机活塞连杆组件往复惯性力和摆杆摇摆惯性力的计算结果。由图可见活塞连杆组件往复惯性力属于不对称幅值的上下波动型,其最大量值达到了200N,并在活塞上止点附近呈 “上窜”态势,而在下止点附近则呈 “下蹲”态势,这种作用方式显然对压缩机的工作不利。由图4 还可以得知,摆杆产生的摇摆离心惯性力虽然量值不大,仅有大约50N 左右,但其主要朝单方向水平作用,因此对往复惯性力的平衡具有一定的干扰。
图5为对活塞连杆组件往复惯性力实施动平衡时,不同过量平衡块布置方位φ对平衡效果的影响程度,其中平衡质量mp=280g。不难发现,当平衡块布置在φ=-15°时(传统机型平衡块的布置相位为φ=0°), 对往复惯性力的消减效果最为明显,惯性力最大消减数值可以达到100N,降幅超过50%。
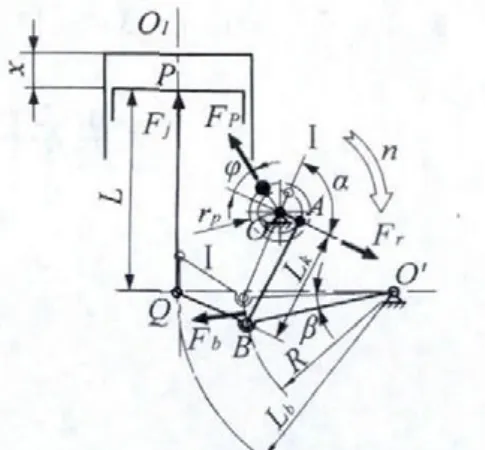
图3 摆杆约束往复活塞式压缩机机构简图Fig.3 The Schematic diagram of mechanism of swing-rod restrained type reciprocating piston air compressor
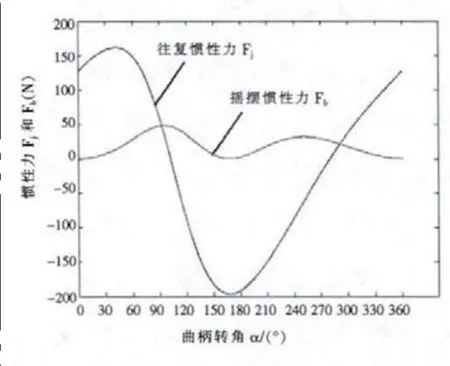
图4 活塞连杆组件往复惯性力和摆杆摇摆离心惯性力Fig.4 The Reciprocating inertia force on Piston-connecting rod assembly and Swing inertia force on swing link
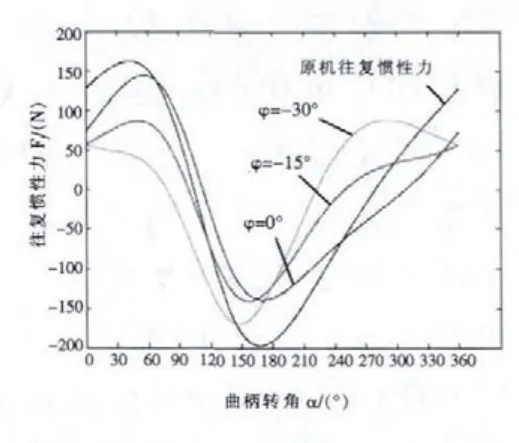
图5 过量平衡块角度方位φ对平衡效果的影响Fig.5 Effects of excessive balance angle range φ on balance effect
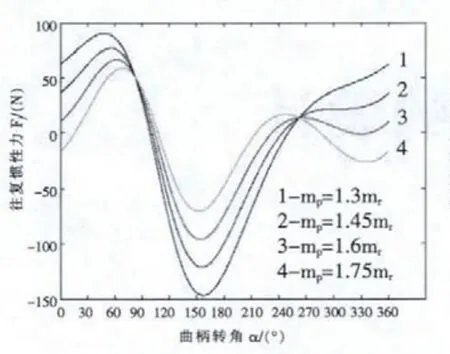
图6 过量平衡块质量mp 对往复惯性力平衡效果的影响Fig.6 Effects of excessive balance mass mpon balance effect forthe reciprocating inertia force
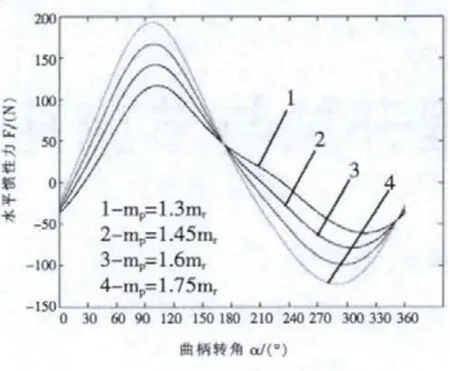
图7 过量平衡块质量mp 派生的水平惯性力水平Fig.7 The horizontal inertial force derive from theexcessive balance mass mp
图6和图7为对活塞连杆组件往复惯性力实施动平衡时,不同过量平衡块质量mp对平衡效果的影响程度。分别选择四种质量 mp=1.3mr、mp=1.45mr、mp=1.6mr和mp=1.75mr进行计算。容易看出,随着平衡质量mp的增加,往复惯性力Fj的总体数值在减少,但其派生的水平惯性力Fi却在增加。综合考虑优化铅垂方向以及水平方向的平衡效果,取平衡块的质量为mp=1.45mr和mp=1.6mr较佳,注意到传统过量平衡中一般取mp=1.15~1.3mr,可见新机型的过量质量远远超过传统做法中的过量质量。
为了验证上述平衡方案的平衡效果,课题组选择平衡块质量mp=1.45mr(亦即平衡块的过量质量百分比为45%)及布置相位φ=-15°的动平衡方案进行实际装机试验,结果表明压缩机在铅垂方向的振动强度明显减弱,对压缩机系统的破坏性获得改善,工作可靠性有所提高,另外压缩机的整机噪声下降了1dB(A)。
3 结束语
摆杆约束往复活塞式压缩机,由于摆杆机构的存在,致使其动平衡变得复杂。为了有效消减压缩机在铅垂方向的往复惯性力,可以采用过量平衡法对其进行平衡消减。与传统做法不同的是,新机型中过量平衡块的最优布置方位不再恰好与压缩机的旋转质量mr反相,而是布置在mr反相位置逆转动方向转过15°左右的位置;另外,新机型平衡块的过量质量亦远远超过了传统过量平衡法中的过量质量,达到了mp=1.45~1.6mr的水平。按照上述布局方案进行平衡块的设置,既可以大幅度消减铅垂方向的往复惯性力Fj,同时又不至于派生出过大的水平惯性力Fi,实践证明能有效缓解压缩机在铅垂敏感方向的振动强度,从而有利于提高压缩机的工作可靠性。
[1]马东.活塞式压缩机机构平衡的研究[D].大连:大连理工大学,2006.
[2]白亮亮,唐良宝.基于ADAMS的活塞压缩机动平衡虚拟设计[J].流体机械,2008,6.
[3]耿爱农,李辛沫,陈君立,等.一种往复活塞式压缩机[P].中国专利:ZL201120096499.2,2011.
[4]耿葵花,耿爱农,李辛沫,等.摆杆约束往复活塞式无油润滑空气压缩机的研究[J].中国机械工程,2012,11.
[5]耿爱农,耿葵花,李辛沫,等.新型摇摆活塞式无油润滑空气压缩机的研究[J].中国机械工程,2011,18.
[6]杜时光.摆杆约束型往复活塞式无油空气压缩机的理论和仿真研究[D].南宁:广西大学,2012.
