基于TMS320F2812振动信号采集系统的设计与开发*
2013-09-12武振昕敖银辉
武振昕,敖银辉,曹 斌
(广东工业大学机电工程学院,广州 510006)
0 引言
机械化生产日益发达,机械设备的状态检测和故障预测、诊断已成为企业生产中一个重要环节,其中机械设备的振动检测与故障诊断是应用最普遍、最多的诊断技术。据统计,约有60% ~70%的机械故障会通过振动和振动辐射出来的噪声反应出来。因此,采集其振动信号以便进行实时监测是十分必要的。而传统的振动信号采集系统多以单片机为中央处理器,结合外围的信号调理电路,A/D转换电路,以及控制电路来构成数据采集模块。8位的单片机对数据的运算与处理能力有限,实时性低,难以适应大量振动数据快速实时采集与处理的要求。16位或高位的单片机等使用高端的处理器的数据采集系统,但是其组织较为复杂,开发周期长,而且由于指令的通用性,数字信号处理算法实现困难,处理器的利用率也低,也不适合对大量振动数据实时采集与处理[1]。
随着生产效率的不断提高,机械设备的振动有效检测和效率高效性变得日益重要。因而本文提出了一种以可编程的数字信号处理器(Digital Signal Processor,简称 DSP)芯片 TMS320F2812为核心,它采用了哈佛结构与多总线的CPU结构,特殊的数据运算指令快速实现了乘法累加,且内置外设资源丰富,从而在信号采集与处理方面比单片机具有速度快、电路简单、实时性高,并且可实现数字信号处理算法等,使用ICP(Integrated Circuits Piezoelectric)加速度传感器来测量其振动加速度信号,并利用F2812内置外设资源,开发出稳定、快速和高效的振动信号采集系统,从而提高了设备检测的实时性和高效化,在很大程度上有助于降低设备维护人员的劳动强度。
1 振动信号采集系统硬件设计
1.1 TMS320F2812处理器简介
TMS320F2812是高性能32位定点 DSP,采用1.8V的内核电压,3.3V的外围接口电压,最高频率150MHz,指令周期为6.67ns,片内有18K的 RAM,128K高速Flash,事件管理EVA和EVB包括通用时钟、PWM信号发生器等,以及16路模拟输入通道的12位高速实时模数转换模块(ADC),内置两路采样保持器,一个转换单元,可实现双通道同步采样,具有高性能的模数转换能力,最小转换时间为80ns。特别适用于有大批量数据处理的测控场合,如数据采集,电力系统控制、电力转换以及通信设备、数字马达控制、工业自动化、电机控制以及工业现场控制等,是高性能32位定点DSP芯片之一[2]。
1.2 系统的组成与结构
本数据采集系统包括信号调理模块、A/D转换模块、SCI通信模块等几部分组成。其中系统的核心部分是A/D转换模块、F2812和SCI通信模块,A/D转换将模拟信号转换成数字信号,AD接受控制芯片F2812指令,设定A/D转换部分的采样频率,控制A/D转换,进行数据采集和预处理,数据就绪后,由F2812通过SCI模块将数据传到上位机,由上位机进行处理[3]。系统框图如图1所示。

图1 系统框图
1.3 信号调理模块
信号调理是指对被测系统的位移、速度、加速度等物理量通过相应传感器后的模拟信号到达A/D采集之前,所经过缩放、滤波等一系列信号处理的过程。如图2信号调理电路所示AD0、AD1为被传感器采集到模拟信号,本文采用双运算放大器LM358设计成差分式减法电路。输出电压为:

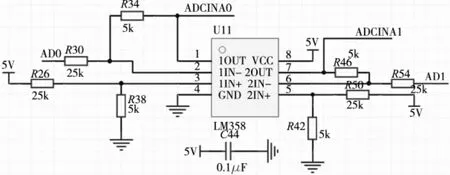
图2 信号调理电路

2 振动信号采集系统软件设计
2.1 TMS320F2812内置的ADC模块简介
TMS320F2812内置的ADC模块是一个12位带流水线的模数转换器(ADC),采样精度高;有快速转换时间,ADC时钟可以配置为25MHz,此时为最高采样带宽12.5MSPS。它有16个通道,其配置灵活,可配置为2个独立的8通道模块,分别服务于事件管理器A和B;两个独立的8通道模块也可以级联构成16通道模块。尽管在模数转换模块中有多个输入通道和两个排序器,但是仅有一个转换器。其模拟输入电压范围为0.0V~3.0V,可用软件编程选择16通道的任何一个,排序器可以工作在2个独立的8通道双序列模式或16通道级联模式,把16个采集结果存储到结果寄存器(ADCRESULT)中,且转换后的数字量表示为:

其中:DADCLO为偏移量,一般取为 0[4-5]。
2.2 A/D采样程序设计
本文采用F2812内置ADC模块对ADCINA0通道进行信号采集。如图3数据采集主程序流程图所示,程序首先对系统初始化,然后调用ADC初始化子程序,在A/D初始化完毕后,当A/D转换器忙时,主程序进入死循环,程序处于等待状态;当A/D转换器空闲时,则启动A/D通道进行转换,当A/D正常转换完毕后,进入中断服务子程序。中断服务程序将A/D转换结果读入数组a[N]中,并为下一个ADC排序重新初始化,如此循环往复,从而实现了系统对输入模拟信号的实时采集[6]。

图3 数据采集主程序流程图
本系统中的ADC模块采用级联式排序器顺序模式,对通道ADCINA0进行采样。EVA的定时器1产生ADC启动信号,采样频率可以通过软件设定,由T1定时器的周期决定。ADC时钟也可以通过软件配置,有外设时钟HSPCLK决定。一旦排序器收到开始转换(SOC)触发信号就开始转换,SOC触发信号也会装载排序计数器控制位(SEQ CNTRn)。ADC通道选择排序控制寄存器(ADCCHSELSEQn)中确定的通道按规定的顺序进行转换,每次转换完成后SEQ CNTRn位自动减1,一旦SEQ CNTRn递减到0。SEQ CNTRn每次到达0时,中断标志位都被置位(INT ENA SEQn=1和INT MOD SEQn=0),必要时可以在中断服务子程序(ISR)中,用ADCTRL2寄存器中的RSTSEQn位将排序器自动复位。这样可以在下一个A/D启动信号到来时,SEQn状态复位。ADC的工作流程如图4所示。
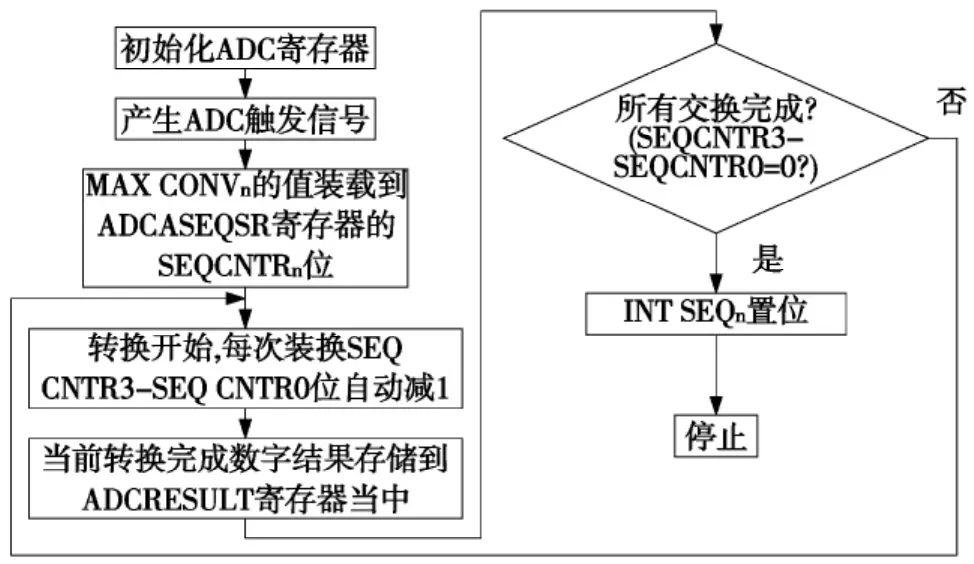
图4 A/D工作流程图
3 F2812与PC机通信设计
3.1 SCI通信模块
SCI是Serial Communication Interface的简称,即串行通信接口。SCI采用双线制通信的异步通信接口(UART),并采用非归零NRZ(No-Return-to-Zero)数据格式,可以通过SCI串行接口与CPU或其他的异步外设进行通信。F2812支持异步外设之间的串行通信,内部有两路专用的串行通信模块(SCIA与SCIB),其中用于通信的两个I/O引脚分别为发送端SCIA/BTXD和接收端SCIA/BRXD。如图5和6所示,本文利用 MAX3232、MAX485芯片将 SCIA、SCIB口分别转换成RS-232、RS-485接口电路进行通信[7-8]。其中J1为常用 DB9的接口,PC机的 COM口通过此DB9的插头进行互联;TLP521为光电藕合芯片,输入输出间互相隔离,电信号传输具有单向性等特点,因而具有良好的电绝缘能力和抗干扰能力,这样可以进行长远距离通信。

图5 RS-232接口电路
3.2 SCI通信程序设计
本文采用NRZ数据格式为:一个起始位,8个数据位,无奇偶校验位,一个停止位。因为本文是两个处理器之间的通信,所以处理器工作模式取空闲线方式。F2812串行通信软件可采用查询和中断两种方式。在本文设计中,F2812把采集到的数据向PC机发送采用查询方式。即当发送缓冲寄存器SCITXBUF将数据发送给TXSHF后,SCITXBUF为空,这时发送缓冲寄存器的就绪标准位TXRDY被置1,DSP可以向PC机发送数据。通过不断地查询,只要当TXRDY被置1时,就可以一直发送新的数据[9]。其通信流程如图7所示。

图6 RS-485接口电路

图7 SCI通信流程图
4 实例
将上述振动信号采集系统应用到并联机构实验台振动测试中,在并联机构执行器的末端布置了ICP传感器且灵敏度为100mV/g,通过软件设定ADC时钟为2.5MHz,ADC采样频率为10KHz快速采样,对并联机构振动信号进行采集,再通过串口将数据传到上位机,由上位机用MATLAB对数据处理分析。
采集得到了大量实时振动数据是以采集器分辨率为单位的数字量没有意义,因此首先对A/D采样振动数据进行标定变换,使之还成为具有物理单位的数字电压值,然后根据传感器灵敏度为100mV/g,把数字电压值转换成机构振动加速度的值,通过MATLAB处理得出如图8振动加速度采样波形图所示。
由振动加速度波形图我们可以清晰的得出,其中纵坐标为振动加速度的值,横坐标为时间值,由于本文采样频率设定为10KHz,所以每个采集点间隔为0.1ms。振动加速度的大小表示机械振动状态的大小,从图上可得出机构最大振动加速度约可达0.6g,最小振动加速度约为0,平均振动加速度大小在0.1g~0.4g之间。这样得出了此并联机构的振动状态,从而达到了振动信号采集的目的,该系统是成功可行的[10]。

图8 加速度采样波形图
5 结束语
机械振动信号中包含着大量的设备状态信息,采集振动信号来实时监测设备,是行之有效的。本文提出一种基于TMS320F2812振动信号采集系统的设计与开发,详细介绍了部分模块的硬件电路设计、振动信号采集软件设计及与上位机通信并有上位机进行处理的整个系统的开发流程。该系统可以快速高效、稳定、可靠工作,有利于实现设备实时振动监测,能够满足高效生产的需要。该振动信号采集系统在工程上具有一定的应用价值。
[1]陈意瑶,鲍其莲.基于ARM9的加速度计信号检测系统和的设计[J].微计算机信息,2007,23(23):143-144.
[2]何苏勤,王忠勇.TMS320C2000系列DSP原理及实用技术[M].北京:电子工业出版社,2003.
[3]Texas Instruments Inc..TMS320F28X 系列 DSP的 CPU 与外设(上)[M].张为宁,译.北京:清华大学出社,2004.
[4]苏奎峰,吕强.TMS320F2812原理与开发[M].北京:电子工业出版社,2005.
[5]孙丽明.TMS320F2812原理及其C语言程序开发[M].北京:清华大学出版社,2005.
[6]顾卫钢.手把手教你学DSP-基于TMS320X2812X[M].北京:北京航天航空大学出版社,2011.
[7]郭京蕾,吴勇.DSP和PC机的串行通信[J].计算机工程与设计,2004,25(3):475 -477.
[8]徐朝阳,朱春光,孙海洋.基于DSP串行外设接口的通信[J].兵工自动化,2003,22(5):39 -40.
[9]曹军军,陈小勤,吴超.TMS320F2812型数字信号处理器PC的串行通信[J].国外电子元器件,2005,8(8):38-40.
[10]王济,胡晓.MATLAB在振动信号处理中的应用[M].北京:中国水利水电出版社,2006.
