强非线性振动系统极限环振幅控制研究
2013-09-09唐驾时
蔡 萍,唐驾时
(1.湖南大学 机械与运载工程学院,长沙 410082;2.漳州师范学院 数学与信息科学系,福建 漳州 363000)
非线性振动系统分岔研究为非线性动力学研究的重要课题,具有自身的理论意义及应用背景[1]。工程中,分岔控制目的是避免分岔给系统造成不利行为。Hopf分岔作为重要的动态分岔,其控制已引起数学、物理及工程领域极大关注。郁培等[2]利用非线性状态反馈,提出推迟、消除Hopf分岔及改变分岔解稳定性的控制方法;刘曾荣等[3]结合反馈与非反馈控制,提出非线性系统分岔控制的混合方法。刘爽等[4]通过设计非线性反馈控制器,控制系统Hopf分岔发生、极限环稳定性及幅值,研究耦合非线性相对转动系统的动力学方程。沈建和等[5]通过正规型计算多尺度摄动过程,获得极限环振幅与频率的解析近似表达式,用于一类三维系统。
Van der Pol振子作为自激振动系统具有典型的Hopf分岔特征。最先出现在非线性电路中,继而在机械、生物、化学、生态学等诸多工程与科学领域中亦发现其存在。Lee等[6]提出非线性能量吸收法,讨论Van der Pol振子极限环振幅抑制的两种结构控制方法。唐驾时等[7]基于非线性反馈控制,利用多尺度法,获得Van der Pol振子极限环振幅与反馈系数的解析关系。
对弱非线性问题研究已较成熟,求解强非线性振动问题也有一些方法,如Cheung等[8]提出改进的L-P法,解决了一类强非线性振动方程的近似求解问题。唐驾时等[9]利用改进的L-P法研究参数激励与强迫激励共同作用的一类强非线性系统余维1分岔问题。Pakdemirli等[10]将L-P展开技术与多尺度法结合提出改进的多尺度法,并成功应用于求解含大参数的强非线性振动问题。对广义Van der Pol型强非线性振子,本文利用改进的多尺度法,获得稳定周期解幅值表达式;设计适当线性、非线性反馈控制器,获得极限环振幅与控制增益之间的近似解析式,通过选择适当的反馈系数达到控制极限环振幅目的。并数值模拟验证理论分析的正确性及可行性。
1 极限环振幅计算
考虑广义Van der Pol振子为:

式中:参数ε为较大数值时,即为强非线性振动方程。令 τ=ωt,则式(1)变为:

应用L-P法[11],将ω2展成幂级数形式:

与传统L-P法不同,采用:

按多尺度法[12]将式(2)的解展成幂级数形式:

其中:Ti=εit(i=0,1,…)。将式(4)、(5)代入式(2),得:

令ε同次幂系数相等,得:
设式(7)的解为:

将式(9)代入式(8),为避免方程解中出现永年项,令 eiT0系数为0,得:
按改进的多尺度法[10],若选取D1A=0,则由式(10)解得:

此时ω1较复杂,显然选择不合理。故选取ω1=0,则由式(10)解得:



2 极限环振幅控制

2.1 线性状态反馈控制

式(16)可视为另一个广义Van der Pol方程:

由上节计算过程,可得受控系统式(16)的极限环幅值表达式为:

极限环幅值随控制增益k变化,且:① 若k=0,则式(18)与式(14)完全相同;② 若k=-μ,则极限环幅值可控制到最小a=0。
2.2 立方非线性状态反馈控制


显然,若k=0,则式(19)、(20)与式(14)完全相同且极限环幅值均随控制增益k变化。
2.3 平方非线性状态反馈控制
2.4 联合控制器

极限环幅值随控制增益k1及k2变化,且:① 若k1=k2=0,则式(21)与式(14)完全相同;② 若k1=-μ,则极限环幅值可控制到最小a=0;③ 比较式(18)、(20)、(21)可知,在相同控制强度下,联合控制更有效。
2.5 其它形式控制器
反馈控制器亦可设计成多种形式(方法相同):

3 数值模拟
由上述讨论知,系统(1)线性反馈控制器不仅能使幅值a为零,也能使a随着k的增大而增大;平方非线性反馈控制器在一次近似下不能控制极限环振幅;立方非线性反馈控制器所得幅值预测表达式中含近似频率ω2,相比另一类三次非线性反馈控制器预测效果稍差;而比较式(20)、式(18),据方程根及系数关系可知,相同反馈强度下,三次控制器较线性控制器更有效;联合控制器也能控制幅值到零,且可设计多种组合,达到更好的控制效果。取参数 ε=2=μ=β=1,ξ=-0.2,不同反馈控制器对应的极限环见图1。控制前极限环幅值为:a=1.765。对选取的三类反馈控制器,控制后极限环幅值分别为:a=2.065,a=1.263,a=1.932。数值模拟结果验证了幅值控制的有效性。
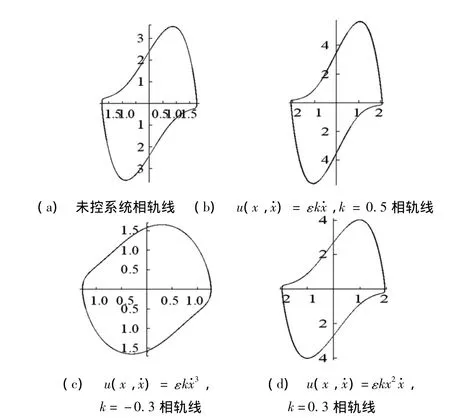
图1 系统(1)在不同反馈控制器下极限环Fig.1 Limit cycles in the system(1)for different controllers

表1 不同控制参数下极限环幅值Tab.1 Amplitudes of the limit cycle for various control parameters
4 结论
通过讨论广义Van der Pol型强非线性振子极限环振幅控制,在不改变振动频率情况下,选择适当的反馈控制器,利用改进的多尺度法,在一次近似下,所得解析结果与数值模拟结果基本吻合;在不同控制参数下,对较大参数ε=2,相对误差不超过1%,仍具有较高精确度。
[1] Chen G R,Moiola J L,Wang H O.Bifurcation control theories,methods and application[J].International Journal of Bifurcation and Chaos,2000,10(3):511-548.
[2] Yu P,Chen G R.Hopf bifurcation control using nonlinear feedback with polynomial functions[J].International Journal of Bifurcation and Chaos,2004,14(5):1683-1704.
[3]Liu Z R,Chung K W.Hybrid control of bifurcation in continuous nonlineardynamicalsystemscoupled chaotic systems[J].International Journal of Bifurcation and Chaos,2005,15(12):3895-3903.
[4]刘 爽,刘浩然,闻 岩,等.一类耦合非线性相对转动系统的 Hopf分岔控制[J].物理学报,2010,59(8):5223-5228.
LIU Shuang, LIU Hao-ran, WEN Yan, etal. Hopf bifurcation control in a coupled nonlinear relative rotation dynamical system[J].Acta Physica Sinica,2010,59(8):5223-5228.
[5]沈建和,陈树辉.非线性振动系统极限环振幅与频率的控制[J].振动与冲击,2009,28(6):90-92.
SHEN Jian-he,CHEN Shu-hui.Control of amplitude and frequency of limit cycles in nonlinear oscillatory systems[J].Journal of Vibration and Shock,2009,28(6):90-92.
[6] Lee Y S,Vakakis A F,Bergman L A,et al.Suppression of limit cycle oscillations in the van der Pol oscillator by means of passive nonlinear energy sinks[J].Structural of Control and Health Monitoring,2006,13(1):41-75.
[7] Tang J S,Chen Z L.Amplitude control of limit cycle in van der Pol system[J].International Journal of Bifurcation and Chaos,2006,16(2):487-495.
[8] Cheung Y K,Chen S H,Lau S L.A modified Lindstedtpoincare method for certain strongly nonlinear oscillators[J].Int J Non-linear Mech,1991,26(3-4):367-378.
[9]唐驾时,尹小波.一类强非线性振动系统的分叉[J].力学学报,1996,28(3):363-369.
TANG Jia-shi,YIN Xiao-bo.Bifurcation of a class of strongly nonlinear oscillation systems[J].Acta Mechanica Sinica,1996,28(3):363-369.
[10] Pakdemirli M, KarahanM M F, BoyaciH. A new perturbation algorithm with better convergence properties:multiple scales lindstedt poincare method[J].Mathematical and Computational Applications,2009,14:31-44.
[11] Nayfeh A H.Problems in perturbation[M].New York:Wiley,1985.
[12] Nayfeh A H,Mook D T.Nonlinear oscillations[M].New York:Wiley,Inter-Science,1979.