雷达测量技术在低介电常数料位测量中的应用
2013-08-31王进朱洪平张伟
王进,朱洪平,张伟
(1.宁波万华聚氨酯股份有限公司,浙江 宁波315812;2.上海恩德斯豪斯自动化设备有限公司,上海200241)
整套雷达系统包括带天线的发射器、微波传送通道、微波反射面、带天线的接收器。在物位测量中,通常发射和接收天线是相同的。
超声波频率大约在40~70kHz,属于机械波。而微波频率在GHz数量级上,属于电磁波。超声波的反射机理是密度差,而微波的反射机理是波阻的变化。反射度R是反射能量与发射能量之间的比值,其负对数的10倍称为反射信号强度,R与介质的介电常数εr的关系如式(1)所示:

由式(1)可知,εr越高则R越高。表1给出了R与εr的关系。如果反射面有波动,则反射度将相应降低。
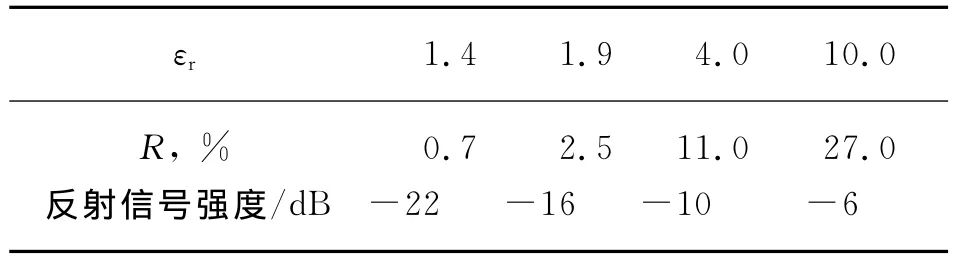
表1 εr与R反射信号强度的关系
微波测量的优点是它不需要任何传送介质,在各种介质中的传送速率c可以通过式(2)算出:

式中:c0——真空中的光速,微波在各种气体介质中的c与c0几乎一样,而且受压力或者温度变化的影响很小。微波在空气中测量误差与压力、温度的关系如图1,图2所示。

图1 测量误差与压力关系(20℃空气)

图2 测量误差与温度关系(0.1MPa空气)
1 雷达测距技术
雷达测距是根据飞行时间TOF(Time of Flight)原理,整个TOF测量过程分5个步骤:发射微波脉冲;脉冲在被测介质表面反射;接收反射回来的脉冲;计算传感器与反射面之间的距离D=ct/2;再计算物位L=E-D。
目前利用微波进行物位测量,主要使用两种技术:调频连续波FMCW(Frequency Modulated Continuous Wave)方法;脉冲方法,这两种方法都可以在量程范围内保证mm级的精度要求。
1.1 FMCW方法
该方法使用线性调频的射频(RF)信号,如发射器发出的频率在9.5~10.5GHz周期性地变化。当介质表面反射回来的信号到达接收器时,发射器中的发射频率也同时发生了变化。微波运行的时间可以通过计算接收到的信号频率与当前发射频率之间的差值来获得。把发射频率与接收频率进行混频处理后,将形成一个中频段的信号,该中频信号频率正好与被测距离呈正比。
1.2 脉冲方法
该脉冲指的是一组有许多微波组成的“微波包裹”。脉冲持续时间约为0.8ns,脉冲的重复频率为3.6MHz。脉冲的运行时间t是相当短的,如果要达到1mm的物位测量分辨率,则需测量时间为6ps,测量如此短的一个时间在技术上是相当困难的。
6GHz的微波以脉冲的形式发出,发射脉冲的重复频率为3.6MHz。反射回来的回波脉冲随后将与一个参考脉冲进入频率混合器进行信号处理。该参考脉冲与发射脉冲形状相同,但其重复频率比3.6MHz小43.7Hz。如图3所示,频率混合器把回波脉冲与参考脉冲相乘,经过混频处理后形成中频脉冲,与发射脉冲形状完全相同,其频率变为中频43.7Hz(周期为23ms),即经过混合处理器处理后的中频脉冲把回波脉冲在时间轴上扩展了8.238×104倍。只要测出中频脉冲上发射脉冲与回波脉冲的时间间隔t1(ms),则t=t1/82 380,即实现了极短脉冲运行时间t的测量。

图3 混频处理后的中频脉冲
2 雷达仪表
2.1 非接触式雷达
对特定工况条件下(压力、温度)的液体和挥发性的(也包括腐蚀性的)介质进行测量时,非接触雷达测量是最合适的测量方法。非接触雷达测量原理的进一步研发使得该技术也可以用于对散装物料的测量,而且不受散装物料中灰尘和充填时粉尘的影响。不同非接触式雷达产品的主要区别是天线种类不同,主要有喇叭天线和杆式天线两种。雷达仪表的天线主要起到三个作用:阻抗匹配,“光圈”作用,汇聚作用(Focusing)。
2.1.1 阻抗匹配
对于微波反射来说,在每个阻抗变化的地方都会产生部分微波能量的反射。为了发射出尽可能多的能量,射频(RF)各个组成部件的阻抗都应该互相匹配,包括高频模块与高频模块电缆的阻抗匹配,天线与微波传送介质的阻抗匹配等。高频模块电缆的阻抗为50Ω,真空的阻抗为377Ω(对应εr=1)。喇叭天线也具有一定的阻抗,而且该阻抗与天线尺寸有关。天线的εr越接近于1,则可以发射出越多的能量。DN80喇叭天线的εr≈1.17,而DN150喇叭天线的εr≈1.04,与真空更接近,能够发射出更多的能量。
2.1.2 “光圈”作用
天线的喇叭越大,则“光圈”越大,天线所能接收到的来自被测介质表面的反射信号越强。
2.1.3 汇聚作用
正如光线会在微小圆孔处发生衍射现象,微波也会在喇叭处发生衍射现象,而且衍射角度随着天线尺寸的减小而增大,即对大尺寸天线来说,衍射效果弱,微波汇聚效果则更好,波束角则更窄。
杆式天线的杆子形状是圆锥形的,其微波的能量分布与DN100的喇叭天线能量分布情况相似。杆式天线的优点是其材料为PTFE,适用于强烈化学腐蚀的场合。
2.2 导波雷达
导波雷达是指微波沿着一根导波缆或者导波杆传送,接触到被测界面后沿着导波缆或导波杆反射回来。利用导波雷达物位测量仪表既可对散装物料(缆式探头)也可对液体(杆式和同轴探头)进行测量。有了可靠的微波导向,即使是湍流液体表面或者有泡沫的液体表面也不会影响测量精度。
导波雷达的优点是其不受被测容器内部温度、压力、密度变化的影响,而且粉尘、泡沫、湍流液面对其影响也很小。缺点是导波缆上的挂料尤其是不规则的挂料将削弱微波强度,改变微波传送速度或者产生虚假的回波信号,这些因素都将导致错误的物位信号。因此,如果采用缆式导波雷达测量粉料物位,要防止料仓受潮,避免粉料受潮后在导波缆上挂料。
3 PIus Master eXact应用软件
E+H公司的雷达仪表在数据处理方面采用先进的Plus Master eXact应用软件。非接触式雷达的“首次回波因子”FEF(First Echo Factor)功能,避免了仪表把多次反射回波误认为物位信号;导波雷达的底部回波EOP(End of Probe)算法使仪表可以在回波信号很弱无法被探测到的情况下,仍然可以通过EOP信号算出物位信号,不失波。
3.1 首次回波因子
非接触式雷达应用于某些几何尺寸罐体时,很可能出现多次反射的回波信号,其信噪比大于真实物位的回波。“首次回波因子”功能避免了仪表把多次反射回波误认为物位信号。
“首次回波因子”定义了最大回波向下的一个带宽(band),算法将搜索在该带宽范围内的第一个峰值,并认定该峰值回波为被测物位反射回来的信号。图4为一例回波曲线,该曲线上有2个回波且第2个回波要比第1个回波幅值大。由于第1个回波在带宽以内,仪表认定其为物位信号;第2个回波是由于多次反射引起的。
“首次回波因子”又分为“动态首次回波因子”和“静态首次回波因子”。“动态首次回波因子”是指“首次回波因子”的大小与最大回波的幅值有关。最大回波幅值越小,则带宽越小,首次回波搜索范围越小,如图5a)所示;最大回波的幅值越大,则带宽越大,首次回波搜索范围越大,如图5b)所示。动态回波因子的优点是防止回波信号过小时,干扰信号进入到带宽中;同时保证回波信号较大时,能够找到有效的首次回波。“静态首次回波因子”是指带宽一定,即“首次回波因子”为常数。

图4 “首次回波因子”的定义

图5 “动态首次回波因子”的工作原理
3.2 EOP算法
对于导波雷达来说,当被测介质液位很低时(尤其是低介电常数的介质),回波信号很弱无法被探测到,但采用EOP算法后,仪表仍然可以通过EOP信号计算出物位。
仪表检测到导波缆末端EOP信号,根据TOF原理计算出缆长(缆长L=空气中微波速度c0t/2)。该缆长与真实缆长之间有一定的差值,用底部回波偏移Lshift表示。
造成差值的原因是微波在空气中的传播速度与在液体介质中的传播速度不同,而EOP信号是微波经过空气—被测介质—空气后,反射回天线的。空气中用微波速度c0计算缆长,将导致所测缆长大于真实缆长,产生差值。
Lshift与(L)的关系如式(3)所示。

式中:Lslope——底部回波偏移率;ε——被测介质的介电常数。
如果同时检测到物位信号与EOP信号,则根据检测到的Lshift与L计算出Lslope,而且该过程是自动重复进行的。如果失波,则仪表将根据当时检测到的Lshift和上次计算出来得Lslope,通过式(3)计算出物位。
4 导波雷达EOP算法的典型应用
某不锈钢材质的圆柱形立罐,罐直径3m,高度约10m,导波雷达安装于罐顶,测量介质为PVC塑料粒子;在导波雷达料位计安装后,加料口离导波雷达水平距离为40~50mm,加料过程中PVC塑料粒子可能会被吹到缆绳上。
当向罐中加入PVC料时,仪表会显示错误的高料位,如98%;当停止加料时,仪表会在不同的料位之间跳变。原因是在持续加料的过程中,PVC塑料粒子会不断地碰撞缆绳,产生干扰信号,故产生料位跳变到98%的虚假信号,而一般罐一旦投入使用都很难进行整改或改造;当不加料时,由于PVC塑料粒子的介电常数很低,DC值在1.6左右,使得微波在PVC塑料粒子上的回波信号很弱,常会引起测量值的跳变。回波信号如图6所示,从回波曲线可以看出,料位回波信号26mV,远低于底部回波信号100mV。
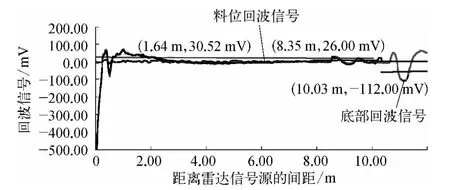
图6 现场回波信号
由于底部的回波信号很好,超过了100mV,而且会随着料位的增加按比例的往后迁移,故可以先屏蔽不稳定的料位回波信号,再利用EOP反推算法计算料位。
输入准确的被测量介质的介电常数和缆绳长度,可以通过提高门槛电压值来屏蔽不稳定的料位回波信号以及进料时的干扰信号,回波曲线如图7所示,即抬高了图7中的门槛线高度。仪表会根据偏移距离、介电常数计算出PVC塑料粒子的料位。

图7 EOP仅推算法示意
5 结束语
微波测量技术解决了很多以前无法解决的应用问题,其应用场合正在不断扩大。当然,微波测量技术并不是万能的,例如在测量泡沫很多的介质时往往选用差压变送器。
[1]艾俊轶.毫米波高精度测距雷达信号处理及实现[D].成都:电子科技大学,2006.
[2]陆石辉,邱瑞鑫,黄少先.浅谈雷达液位计及其构成的液位测量系统[J].中国水能及电气化,2007(10):48-51.
[3]霍玉晶,陈千颂,潘志文.脉冲激光雷达的时间间隔测量综述[J].激光与红外,2001(03):8-11.
[4]张金,王伯雄,崔园园,等.高精度回波飞行时间测量方法及实现[J].兵工学报,2011(08):60-64.
[5]崔景霖,荣刚,马明,等.基于时间数字转换技术的超短时间间隔测量[J].探测与控制学报,2009(04):67.
[6]徐家迅.一种改善脉冲雷达检测性能的方法[J].硅谷,2012(05):229-231.
[7]廖华桥.LFMCW液位测量雷达系统及信号处理研究[D].成都:电子科技大学,2006.
[8]齐国清.FMCW液位测量雷达系统设计及高精度测距原理研究[D].大连:大连海事大学,2001.
[9]陈祝明,丁义元,向敬成.提高线性调频连续波雷达测距精度的最大值估值算法[J].系统工程与电子技术,1999(06):40-43,62.
[10]陈先中,柳瑾.FMCW微波液位测量的快速频率估计算法[J].传感技术学报,2005(04):221-225.
[11]张同舟.高频雷达目标检测方法研究[D].西安:西安电子科技大学,2011.
[12]王春麟.提高超声回波检测测距精度的方法[J].电测与仪表,1995(12):5,24-29.
[13]叶旭,魏萌,徐科军,等.导波式雷达物位计回波信号处理方法研究[J].化工自动化及仪表,2012,39(10):1282-1284,1308.
