高空长航时SINS/SAR/CNS组合导航方法研究*
2013-08-16杨波陈逍熊陶单斌
杨 波 陈 逍 熊 陶 单 斌
1. 第二炮兵工程大学自动控制系,西安 710025 2. 中航飞机股份有限公司汉中飞机分公司,陕西汉中 723213
高空长航时SINS/SAR/CNS组合导航方法研究*
杨 波1陈 逍2熊 陶1单 斌1
1. 第二炮兵工程大学自动控制系,西安 710025 2. 中航飞机股份有限公司汉中飞机分公司,陕西汉中 723213

研究了一种在高空长航环境下进行高精度组合导航的方法。将捷联惯导系统(SINS)和天文导航系统(CNS)的误差作为组合导航系统状态,根据系统误差模型建立状态方程。将SINS与合成孔径雷达(SAR)各自输出的水平位置信息对应相减作为量测之一,将SINS与CNS各自输出的姿态信息对应相减作为量测之二,并引入气压高度计,将SINS与气压高度计各自输出的高度信息相减作为量测之三,根据量测建立对应的量测方程。采用卡尔曼滤波设计组合导航滤波算法。仿真结果表明,SINS/SAR/CNS组合导航的位置精度达到±10.1m,姿态精度达到±0.11′,对于高空长航的飞行环境具有很强适用性。 关键词 捷联惯导系统;合成孔径雷达;天文导航系统;组合导航;长航时
捷联惯导系统(SINS)和合成孔径雷达(SAR)均能自主输出载体的水平位置,而且SAR的位置误差是收敛的,从而利用SAR辅助修正SINS进行SINS/SAR组合导航,可以有效克服SINS误差随时间发散的缺陷。目前,SINS/SAR组合导航已成为军用领域内一种高精度、高自主性的新兴组合导航模式[1]。然而,SAR成像容易暴露自身,为了隐蔽的需要,不能进行连续成像,而且存在成像后因匹配失败而无法定位的问题,这将严重影响SINS/SAR组合导航精度。
天文导航作为一种自主式导航手段,能够提供精确的、不随时间漂移的姿态信息,而且抗干扰性很强[2]。如果将天文导航系统(CNS)引入到SINS/SAR组合导航系统中,那么当SAR无法成像或匹配失败时,可以利用CNS来辅助修正SINS,以减缓SINS误差发散的速度,此外CNS可以显著增强整个SINS/SAR/CNS组合导航系统的抗干扰性。目前,国内外对于SINS/SAR/CNS组合导航的研究较少,本文研究将其用于高空长航的飞行环境,提出将SINS和CNS的误差作为组合导航系统状态,将SINS输出的位置和姿态信息、SAR输出的水平位置信息、CNS输出的姿态信息作为量测,并在量测中引入气压高度计的高度信息以弥补SAR无法提供高度的缺陷,采用卡尔曼滤波设计组合导航滤波算法。
1 SINS/SAR/CNS组合导航方案
在SINS/SAR/CNS组合导航系统中,SINS作为导航主设备,SAR,CNS和气压高度计作为导航辅助设备,以东-北-天地理坐标系作为导航系。其中,SAR通过雷达图像匹配定位,可以确定出载体的水平位置[3];CNS通过捕获星体与星图识别,可以得到载体的姿态角。
首先,选取SINS与CNS的误差作为组合导航系统状态,根据系统误差模型建立状态方程;然后,将SINS与SAR各自输出的水平位置信息对应相减作为量测Z1,将SINS与CNS各自输出的姿态信息对应相减作为量测Z2,并引入气压高度计,将SINS与气压高度计各自输出的高度信息相减作为量测Z3,建立对应的量测方程;采用卡尔曼滤波设计组合导航滤波器,将上述量测送到滤波器中进行滤波计算,获得SINS与CNS误差的最优估计值;最后,利用该估计值实时对SINS与CNS进行误差校正,并将校正后的SINS输出作为整个组合导航系统的输出。因此,SINS/SAR/CNS组合导航的原理方案如图1所示。

图1 SINS/SAR/CNS组合导航原理框图
2 组合导航系统状态方程
采用间接法滤波进行SINS/SAR/CNS组合导航设计,则将导航系统误差作为组合导航系统的状态。由于SAR图像匹配定位与气压高度计的精度均比较高,因此文中仅对SINS与CNS进行误差分析与建模,而将SAR与气压高度计的测量误差考虑为白噪声,这有利于降低滤波器的系统状态维数。
SINS的误差源主要是惯性器件误差,其经标定补偿后还剩下随机漂移[4],在组合导航设计中陀螺误差主要考虑随机常值漂移和白噪声,加速度计误差主要考虑随机常值误差和白噪声,即陀螺常值漂移εbi和加速度计常值误差▽bi,可分别表示为
(1)
(2)
由于惯性器件误差和初始误差的存在,导致SINS的导航参数也存在误差,包括数学平台姿态误差、速度误差、位置误差。上述误差的模型方程在很多文献资料中有详细叙述,在此不再赘述。
CNS的定姿精度很高且误差不随时间积累,目前精度已达角秒级。但是,CNS的核心部件——星敏感器难以按照精确的方位要求进行安装,其安装误差将严重影响天文导航精度[5]。通常可将星敏感器沿载体系3个轴方向上的安装误差角δAi考虑为随机常值,即
(3)
于是,将SINS与CNS的误差作为组合导航系统状态,具体包括SINS的数学平台姿态误差φE,φN,φU,速度误差δvE,δvN,δvU,位置误差δL,δλ,δh,陀螺常值漂移εbx,εby,εbz,加速度计常值误差▽bx,▽by,▽bz,星敏感器安装误差δAx,δAy,δAz。因此,SINS/SAR/CNS组合导航系统状态向量X为
X=[φE,φN,φU,δvE,δvN,δvU,δL,δλ,δh,
εbx,εby,εbz,▽bx,▽by,▽bz,δAx,δAy,δAz]T
(4)
根据SINS与CNS的误差模型,可将SINS/SAR/CNS组合导航系统的状态方程描述为

(5)
其中,F,G分别为系统状态阵、系统噪声阵;W为系统白噪声,包括陀螺白噪声与加速度计白噪声。
3 组合导航系统量测方程
由于SINS和SAR均能输出载体的水平位置信息(经度与纬度),因此可将SINS输出的纬、经度与SAR输出的对应信息相减作为SINS/SAR/CNS组合导航的量测之一Z1,即
(6)
其中,LI,λI为SINS输出的纬、经度,LS,λS为SAR输出的纬、经度。于是,根据式(6)可列写出量测Z1所对应的量测方程为
(7)
其中,δLS,δλS分别为SAR的纬度和经度误差,均考虑为白噪声过程。
结合组合导航系统状态向量X,根据式(7)可将量测Z1所对应的量测方程写为
Z1=H1X+V1
(8)
其中,H1为量测矩阵;V1=[δLS,δλS]T为量测白噪声,其方差强度阵为RS。
类似地,SINS与CNS均能输出载体的姿态角信息,因此将SINS输出的姿态角与CNS输出的姿态角对应相减作为SINS/SAR/CNS组合导航的量测之二Z2,即
Z2=[ψI-ψCθI-θCγI-γC]T
(9)
其中,ψI,θI,γI分别为SINS输出的航向、俯仰和横滚角,ψC,θC,γC分别为CNS输出的对应姿态角。设SINS的3个姿态角误差分别为δψ,δθ,δγ,则其与SINS数学平台姿态误差角之间满足如下关系:
φN+φU
(10)

(11)

(12)

设CNS的3个姿态角误差分别为δψC,δθC,δγC,由于星敏感器安装误差角δAi的存在,导致CNS的姿态角误差与星敏感器安装误差角之间满足如下关系[6]:
(13)
(14)
(15)
则根据式(9)可列写出量测Z2所对应的量测方程为
Z2=[δψ-δψCδθ-δθCδγ-δγC]T
(16)
于是,将式(10)~(15)代入式(16)中,并结合组合导航系统状态向量X,可列写出量测Z2所对应的量测方程为
Z2=H2X+V2
(17)
其中,H2为量测矩阵;V2=[VψCVθCVγC]T为量测白噪声,其方差强度阵为RC。
由于SAR无法输出载体的高度信息,则无法对SINS的高度输出进行修正,为此引入气压高度计以弥补这一缺陷。于是,将SINS与气压高度计各自输出的高度信息相减作为量测Z3,即
Z3=[hI-hB]
(18)
其中,hI为SINS输出的高度,hB为气压高度计输出的高度。于是,根据式(18)可列写出量测Z3所对应的量测方程为
Z3=[(h+δh)-(h+δhB)]=[δh-δhB]
(19)
其中,δhB为气压高度计的高度误差,可考虑为白噪声过程。
再结合组合导航系统状态向量X,根据式(19)可将量测Z3所对应的量测方程写为
Z3=H3X+V3
(20)
其中,H3为量测矩阵;V3=δhB为量测白噪声,其方差强度阵为RB。
于是,根据式(8),(17)和(20),可得SINS/SAR/CNS组合导航系统的量测方程为
(21)
从而在获得组合导航系统的状态方程和量测方程后,就可以采用卡尔曼滤波进行组合导航滤波计算。当所有导航设备均能正常工作时,根据式(5)和(21)进行滤波计算;而当SAR成像或匹配失败而无法定位时,则根据式(5),(17)和(20)进行滤波计算。经过滤波计算,获得系统状态(即SINS与CNS的误差)的最优估计值,利用该估计值可以对SINS和CNS实时进行系统误差校正,并将校正后的SINS的输出作为SINS/SAR/CNS组合导航系统的输出。
4 仿真与结论

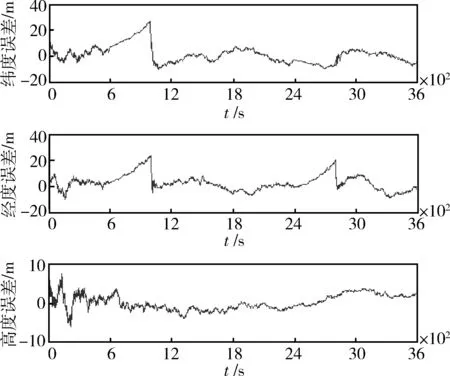
图2 SINS/SAR/CNS组合导航的位置误差

图3 SINS/SAR/CNS组合导航的姿态误差
根据仿真结果可以看出,SINS/SAR/CNS组合导航具有较高的定位定姿精度:在3600s的较长航行时间内,定位精度达到±10.1m,定姿精度达到±0.11′。而且,当SAR每次长达400s无法正常定位时,系统仍然具有较高的导航精度:定位精度保持在±26.8m,定姿精度保持在±0.13′。这就说明,将CNS引入到SINS/SAR组合导航系统中,不仅可以在SAR无法成像或匹配失败时有效地修正SINS,以减缓SINS误差发散的速度。而且,可以有效提高系统的导航精度和可靠性,特别是显著增强了系统的抗干扰能力。
可见,SINS/SAR/CNS组合导航系统在长航环境下不仅具有较高的导航精度,而且具有良好的可靠性和较强的抗干扰能力。由于SINS,SAR,CNS和气压高度计均为高自主性的导航设备,这就使SINS/SAR/CNS组合导航系统同样具备高自主性,从而使其在军用领域内将具有广阔的应用前景,非常适用于高空长航的飞行器等。
[1] 冷雪飞, 刘建业, 熊智. SAR/INS/TAN组合导航系统中的滤波算法研究[J].系统工程与电子技术, 2006, 28(1): 23-25.(LENG Xuefei, LIU Jianye, XIONG Zhi. Study of Filtering Algorithm for SAR/INS/TAN Integrated Navigation Systems[J]. Aerospace Electronics Information Engineering and Control, 2006, 28(1): 23-25.)
[2] 吴海仙, 俞文伯, 房建成. SINS/CNS组合导航系统的降阶模型研究[J]. 航天控制, 2005, 23 (6): 12-16.(WU Haixian, YU Wenbo, FANG Jiancheng. Research on Reduced Dimension Model of SINS /CNS Integrated Navigation System[J]. Aerospace Control, 2005, 23 (6): 12-16.)
[3] 刘建业, 熊智, 段方.考虑量测滞后的INS/SAR组合导航非等间隔滤波算法研究[J].宇航学报, 2004, 25 (6): 626-631.(LIU Jianye, XIONG Zhi, Duan Fang. Processing the Measurement Delay INS/SAR Integrated Navigation In-coordinate Interval Filtering Algorithm Study[J]. Journal of Astronautics, 2004, 25 (6): 626-631.)
[4] 秦永元, 张洪钺, 汪叔华.卡尔曼滤波与组合导航原理[M].西安: 西北工业大学出版社, 1998.( QIN Yongyuan, ZHANG Hongyue, WANG Shuhua. Theory of Kalman Filtering and Integrated Navigation [M]. Xi′an: Northwestern Polytechnical University Press, 1998.)
[5] Mark E Pittelkau. Kalman Filter for Spacecraft System Alignment Calibration [J].Journal of Guidance, Control and Dynamics, 2001, 24(6): 1187-1195.
[6] 杨波, 王跃钢, 单斌, 周小刚. 长航时环境下高精度组合导航方法研究与仿真[J].宇航学报, 2011, 32(5): 1054-1059.(YANG Bo, WANG Yuegang, SHAN Bin, ZHOU Xiaogang. Research and Simulation on High Accuracy Integrated Navigation Method under Long-Endurance Environment[J]. Journal of Astronautics, 2011, 32(5): 1054-1059.)
收稿日期:2013-05-06
作者简介:蔺建英(1962-),男,河北人,硕士,高级工程师,主要研究方向为靶场外弹道测量;马海潮(1962-),男,河北人,博士,高级工程师,主要研究方向为靶场数据处理与精度分析。
Research on SINS/SAR/CNS Integrated Navigation Method under High Altitude Long-Endurance Environment
YANG Bo1CHEN Xiao2XIONG Tao1SHAN Bin1
1. Department of Automation, The Second Artillery Engineering University, Xi’an 710025, China 2. AVIC Aircraft Co. Ltd. Branch in Hanzhong, Shanxi Hanzhong 723213, China
Apreciseintegratednavigationmethodunderhighaltitudelong-enduranceenvironmentisresearched.ErrorsofSINSandCNSarechosenasintegratednavigationsystemstates,andsystemstateequationsarebuiltaccordingtosystemerrormodels.ThedifferencebetweenhorizontalpositionoutputsofSINSandSARischosenasobservationI,andthedifferencebetweenattitudeoutputsofSINSandCNSischosenasobservationII.Thebarometricaltimeteristakentoconstructtheintegratednavigation,andthedifferencebetweenaltitudeoutputsofSINSandbarometricaltimeterischosenasobservationIII.Thenobservationequationsarebuiltaccordingtotheaboveobservations,andtheKalmanfilteringalgorithmisadoptedtodesigntheintegratednavigationfilter.SimulationresultsshowedthatthepositionprecisionofSINS/SAR/CNSintegratednavigationreached±10.1m,andattitudeprecisionreached±0.11′.Sothisintegratednavigationmethodissuitableforthehighaltitudelong-enduranceflightenvironment.
Strapdowninertialnavigationsystem;Syntheticapertureradar;Celestialnavigationsystem;Integratednavigation;Long-endurance
*陕西省自然科学基金资助
2013-04-22
杨 波(1980-),男,江苏滨海人,博士,讲师,主要研究方向为惯性导航与组合导航;陈 逍(1969-),男,湖北浠水人,硕士,高级工程师,主要研究方向为飞机飞行试验;熊 陶(1973-),女,贵州凯里人,硕士,副教授,主要研究方向为惯导系统标定与对准;单 斌(1974-),男,西安人,硕士,副教授,主要研究方向为惯导系统自对准。
V249.3
A
1006-3242(2013)05-0031-04
