基于机动平台的红外成像制导仿真设备的方位标校及误差修正
2013-08-10王继光白云塔高文静李金亮
王继光,白云塔,高文静,李金亮
(解放军91404部队,秦皇岛066000)
0 引 言
红外成像制导由于精度高和准全天候的特点而成为精确打击的重要手段。成像制导导弹造价昂贵,测试成本高,采用模拟导引头工作的红外成像制导仿真系统进行测试具有重复性高和成本低的优点。仿真系统由红外热像仪和伺服机构组成,通过计算机控制,模拟红外导引头捕获,跟踪目标的工作机理。在外场,通常使用车载或舰载平台,这样,灵活性高,尤其对距离的调整有巨大优势。但是,红外成像制导仿真设备模拟导引头的跟踪过程,其输出角度为相对坐标。对于测试,要实时获取与GPS数据一致的方位和俯仰角度[1-2],所以有必要采用一种简单、实时地进行角度转换和误差修正的方法。
基于舰船机动平台,对于海上目标采用海天线基准进行角度修正的方法取得了很好的效果。
1 红外成像制导仿真设备工作原理及测试误差分析
1.1 红外成像制导仿真模拟设备工作机理
图1是用于“海尔法”的红外成像寻的导引头工作原理图,其主要由探测、处理跟踪、自动驾驶和控制器组成。

图1 用于“海尔法”的红外成像寻的导引头
图2 是红外成像制导仿真系统原理图,解算后的偏角要送往伺服系统,使热像仪始终对准目标,红外成像导引头与之不同的是偏角是送往弹体,使弹体始终对准目标。
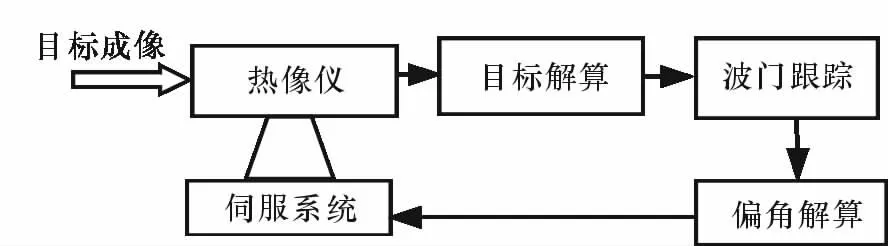
图2 红外成像制导住址模拟系统工作原理
1.2 基于机动平台测试误差分析
红外成像制导仿真系统在装备测试中需要布设在固定或机动平台上。固定站点布设可以利用工具严格地进行测试前参数的标校,测量数据比较准确。但是为了模拟导引头对攻击目标的逼近过程,需要安装在机动平台上进行测量[3-4]。
对海上测量,设备安装固定在测量船上,必须有足够的方位和俯仰作用范围,对机动的海面或空中目标进行跟踪测量。船摇对测量的影响很大,可造成目标方位、俯仰测量值的偏差。一般情况下,船的纵横摇信息由于接口等因素很难实时得到。利用图像实时处理的方法,可以通过坐标变换实现对目标方位真值的精确测量[5]。
设备方位指示的0刻度与船头方向一致,设备竖轴与水平面严格垂直时,红外视场中心线与海天线重合,此时俯仰刻度为0°。测量方位角和俯仰角分别用A和E表示。设在某个时刻测得的在海天线上的目标图像如图3所示。设备跟踪目标,海天线在视场中显示为1条实线,此时跟踪方位角和俯仰角分别为A1和E1。
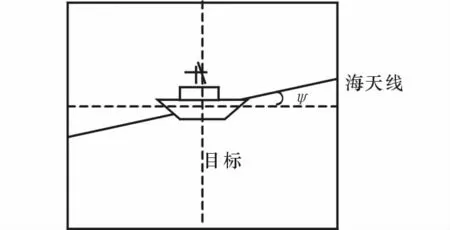
图3 机动平台获得的瞬时视场图像
设备载体船在海上,近似重心海拔高度不变,船头随波浪起伏,船身倾斜。据此建立坐标系如图4所示,以船重心为原点,设备坐标系为O′-X′Y′Z′,以船头水平方向为x轴建立大地坐标系为O-XYZ。为便于计算,设这3个原点重合,则设备坐标系为大地坐标系沿Y轴转φ角,再绕自身X′轴旋转θ角构成。2个坐标系的关系为:
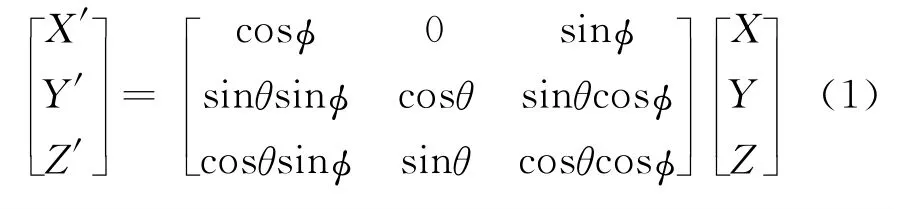
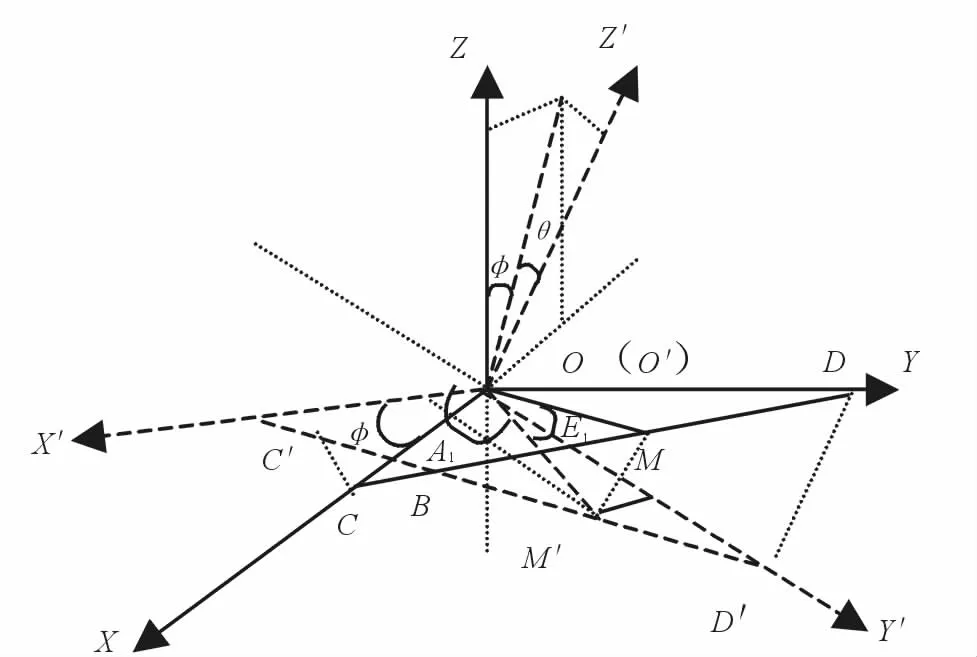
图4 设备坐标系与大地坐标系
进一步简化,设原点与海平面平齐,则海天线在XOY平面上。在设备坐标系中,瞬时视场中的海天线为CD,视场中心为M,在X′OZ′平面的投影分别为C′、D′,M′,由几何关系知D′在OY′上,OM垂直于CD,OM′垂直于C′D′,DD′垂直于OD′,CD与C′D′相交于B点。根据图1所示,∠DBD′=ψ,B点在设备坐标系中的坐标可以确定为(X′B,Y′B,0),根据B点坐标和M点坐标,可以确定θ和φ角:

式(2)有6个方程,6个未知数,方程可解。
根据图4的几何关系,可以确定M在大地坐标中的方位角∠COM:
得到:

2 结果分析
由以上分析知,根据图4中海天线的位置和倾斜角度,可以通过计算确定设备机动平台纵横摇的偏角,并可确定对于大地坐标系下海天线附近目标的位置信息。对于不在海天线的目标位置,可以通过瞬时视场每个像素对应的角度算出对海天线的偏角来确定。

图5 机动平台获得的不在海天线上的目标图像
如图5所示,设瞬时视场的纵向角度为6°,图像像素为800×600,ΔE对应的像素为N,则:

目标俯仰角加海天线偏角为海天线在设备坐标系中的俯仰角E1,其他计算与以上相同。
船头方向与正北的偏角通过电子测量仪器或GPS可以测得[6-7],于是可以近似计算对正北的目标方位角度,从而获取真实的导引头攻击态势的实时位置信息。
3 结束语
基于坐标变换和瞬时视场图像像素测量,可以对机动平台的纵横摇角度进行计算修正,并对目标在大地坐标中的实际方位角度进行校准修正,为目标绝对位置测量提供可靠数据,为设备和目标的态势演变提供实时信息,对测量训练有重要意义。
[1]王琦,张继旭.基于CCD激光经纬仪的雷达标校及数据处理方法[J].战术导弹技术,2009,1(1):89-92.
[2]薛鸿印.用GPS标校平台罗经方位安装误差与舰向精度测量[J].现代防御技术,2000,28(6):47-51.
[3]李向荣,郭平平,乔彦峰,等.动基座方位瞄准系统海上精度标校方法研究[J].测试技术学报,2004,18(6):173-176.
[4]张同双,李晓勇,钟德安,等.航天测量船无限电测量设备方位零位标校新方法[J].电讯技术,2008,48(6):30-34.
[5]吴冰,秦昆.一种快速实用方位标校方法及轴角变换系统[J].现代雷达,2003,25(9):36-38.
[6]敬军.机动平台识别器方位零值的几种标校方法[J].电讯技术,2006,46(6):161-163.
[7]王万玉,张宝全,陈刚.俯仰/方位座架轴系误差分析及标校[A].中国空间科学学会空间探测专业委员会第十九次学术会议文集(下册)[C].宁波:中国空间科学学会空间探测专业委员会,2006:720-723.
