基于混合粒子群优化算法的多弹协同航迹规划
2013-08-09李帆郝博万聪梅赵建辉薛蕾
李帆,郝博,万聪梅,赵建辉,薛蕾
(北京航空航天大学仪器科学与光电工程学院,北京100191)
0 引言
多弹协同航迹规划是实现多弹低空突防的关键环节。单枚导弹作战时,其作战范围、杀伤半径、摧毁能力及攻击精度等方面受到很多限制[1],而多弹协同作战相对单枚导弹可提高作战成功率。多弹协同低空突防航迹规划是指在综合考虑导弹机动性能、突防概率、碰地概率和飞行时间等约束下,为导弹设计出既满足团队时间协同要求,又使整体生存概率最大的飞行航迹。
无论是离线还是在线,多弹协同航迹规划比单枚导弹航迹规划要复杂得多,文献[2]提出采用分解策略,将航迹规划总体结构分为航迹规划层、协同规划层和航迹平滑层。目前关于多弹协同离线和在线航迹规划算法的研究不多,文献[3]用Voronoi图法在威胁环境建模的基础上采用遗传算法进行离线航迹规划,但该方法规划出来的是二维几何路径,不满足导弹机动性能要求,且Voronoi图必须随时更新,耗时长,不能用于弹上实时航迹规划。文献[4]采用协同进化算法规划出三维离线航迹,此外还有蚁群算法[5]、3DSAS 算法[6],但这些算法所需参数较多,比较复杂。
本文采用分解策略将多弹协同航迹规划总体结构分为两层:航迹规划层与协同规划层。与文献[2]不同的是,没有航迹平滑层,因为在航迹规划层,本文将K均值聚类算法、小生境算法、模拟退火(SA)算法[7]引入粒子群优化(PSO)算法中,提出混合粒子群优化(HPSO)算法来规划多条备选航迹,与遗传算法相比,该算法无需大量的参数和繁琐的步骤,所规划的航迹平缓,满足导弹机动性能要求,不需要进行平滑计算,且可分别进行离线和在线航迹规划。
1 实现方案
多弹协同航迹规划流程如图1所示。首先进行威胁建模;然后进行离线规划,航迹规划层为每枚导弹规划出各自的多条备选航线;协同规划层根据协同时间为每枚导弹选出使导弹编队代价最小的航迹和导弹速度。当导弹根据离线规划的航迹飞行遇到突发威胁时,则以当前位置为起始点,进行在线协同航迹规划。这种分解策略的优点在于通过简单有效的协同时间,把一个复杂的高维优化问题分解成一个计算量小的低维问题,从而大大降低了导弹之间信息传输量,提高了整个系统的效率。
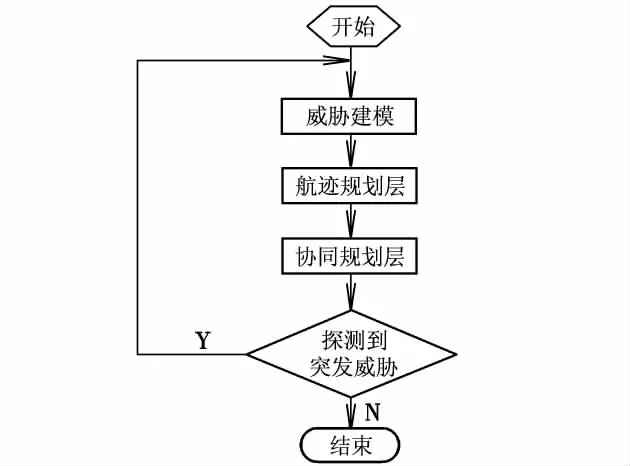
图1 多弹协同航迹规划流程图
2 威胁建模
本文采用的最小威胁曲面模型如下:

式中,T(x,y)为威胁信息;f(x,y)为地形信息,设置最小离地高度为0.05 km以避免巡航导弹低空飞行时撞击地面。T(x,y)采用山峰威胁建模方法:
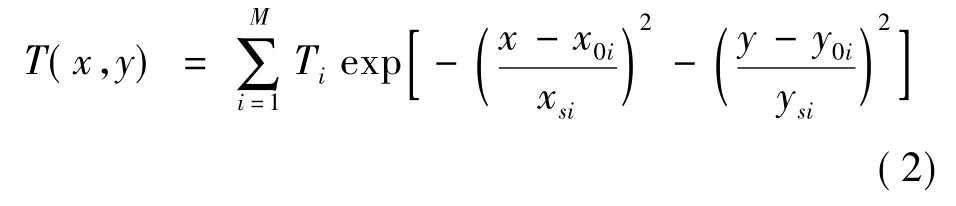
式中,Ti,(x0i,y0i),(xsi,ysi)分别为山峰模拟算法参数中的峰高、山峰中心、峰衰减系数。
3 航迹规划层
航迹规划层的目的是规划出多条备选航迹,文献[8]提出采用PSO算法来进行多航迹的规划,但PSO算法易陷入局部最优、进化后期收敛速度慢。文献[9]提出将SA算法引入PSO算法,以提高PSO算法全局搜索的能力,故本文将两种算法结合形成PSOSA算法,并总结出算法流程图如图2所示。
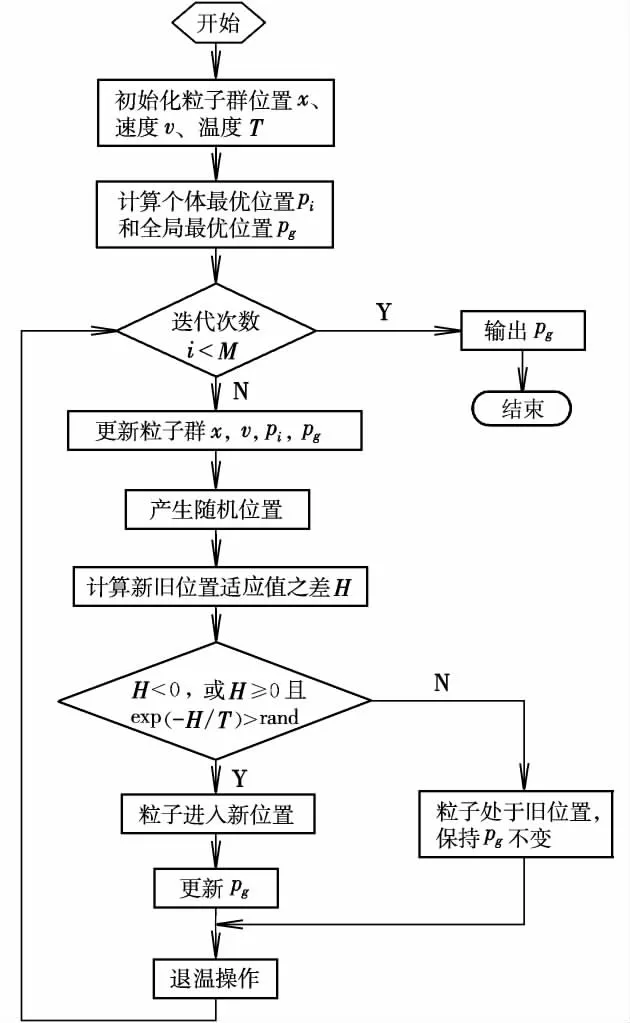
图2 PSOSA算法流程图
多航迹规划要求生成的航迹在空间上不应聚集在一起,本文采用小生境算法来解决此问题,同时为保证所有小生境子种群在空间上隔离,先采用K均值聚类算法对所有粒子进行一次聚类,每个个体只在各自的子种群中利用PSOSA算法独立进化,最后,每个子种群将分别生成一条最优航迹。将K均值聚类算法、小生境算法与PSOSA算法结合,所得HPSO算法流程如图3所示。
4 协同规划层
航迹规划层为每枚导弹规划出了多条最优、次优航迹,将其传给协同规划层。协同规划层首先选择每枚导弹对应的最优航迹,假设导弹速度的变化范围为V∈[Vmin,Vmax],设第i枚导弹的最优航迹长为 Li,则此航迹对应飞行时间 ti∈[Li/Vmax,Li/Vmin];然后求出所有导弹时间集合的交集S=t1∩t2∩…∩tN,在战争中,导弹飞行时间越短越好,故所有导弹到达时间(即协同时间)ETA定义为:ETA=min(S);最后协同规划层根据ETA和每枚导弹的最优航迹求出对应速度。如果所有导弹按各自的最优航迹计算出来的到达时间集合没有交集,则协同规划层从飞行航迹代价最小的导弹开始,依次选择某几个导弹按次优甚至更次优的航迹计算S,直到每枚导弹到达目标的时间集合有交集为止。协同规划层流程图如图4所示。

图3 HPSO算法流程图
5 仿真实验
情形一:3枚导弹对一个固定的敌方目标从不同方向实施攻击。要求所有导弹同时到达,以减小被击中的概率。基本参数设置:粒子数为40,搜索空间为3维,迭代次数为400。仿真数据如表1所示,所规划航迹如图5所示。可见该算法能够得到3条空间上相距比较远的航迹,取得了较好的规避效果,以相同的时间不同的突防角度进入,提高了打击成功率。

表1 3枚导弹攻击1个目标的仿真数据

图5 3枚导弹攻击1个目标的离线航迹图
情形二:3枚导弹攻击3个目标,假设航迹规划之前已为每枚导弹分配好了固定目标,同样要求所有导弹同时到达目标。仿真数据如表2所示,所规划航迹如图6所示,3枚导弹以相同的时间不同的突防角度到达不同的目标,成功实现了突防。
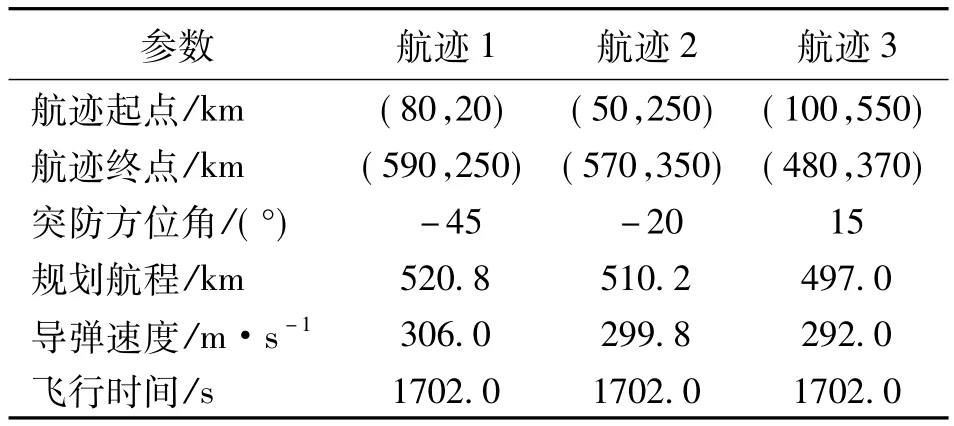
表2 3枚导弹攻击3个目标离线仿真数据
情形三:当导弹飞行过程中遇到突发威胁时,需要进行多弹协同在线航迹规划,重新确定规划起点,航迹终点和突防进入方位角不变。仿真数据如表3所示,所规划航迹如图7所示,和图6比较新增加了3个突发威胁,可见导弹重规划部分成功地对新出现的威胁进行了规避,规划效果基本满足导弹任务需求。
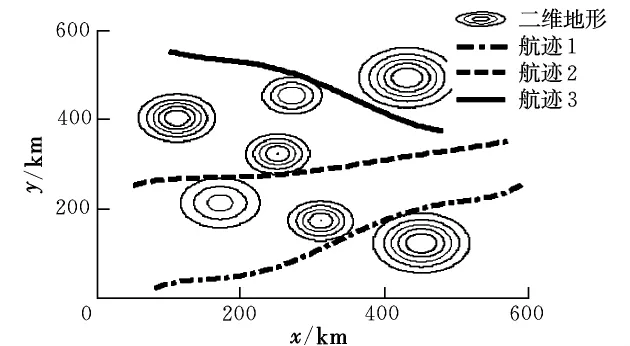
图6 3枚导弹攻击3个目标的离线航迹图
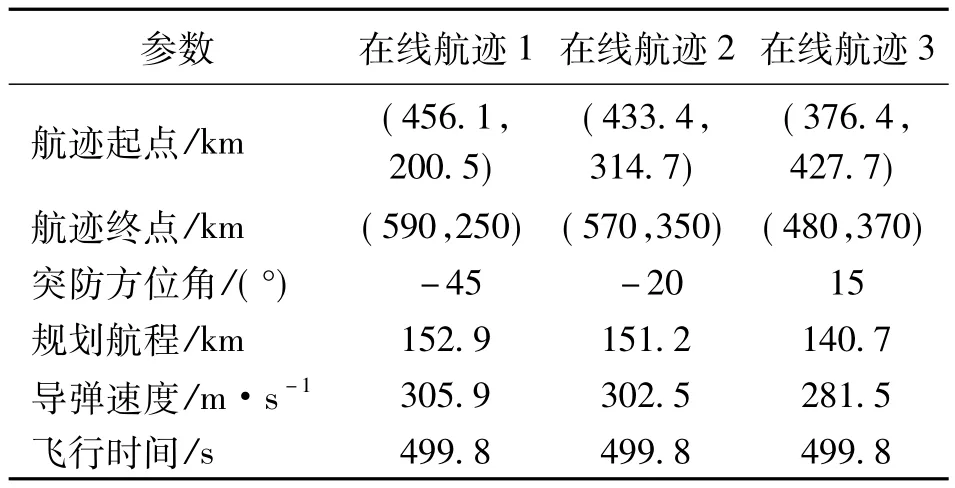
表3 3枚导弹攻击3个目标在线规划仿真数据

图7 3枚导弹攻击3个目标的在线航迹图
图8给出了情形一的航迹高度曲线,可以看到三条航迹高度均不过100 m,在超低空飞行的范围内,可减小被雷达探测到的概率,增强导弹的突防能力,且弹道平缓,可使过载较小,节省燃料。
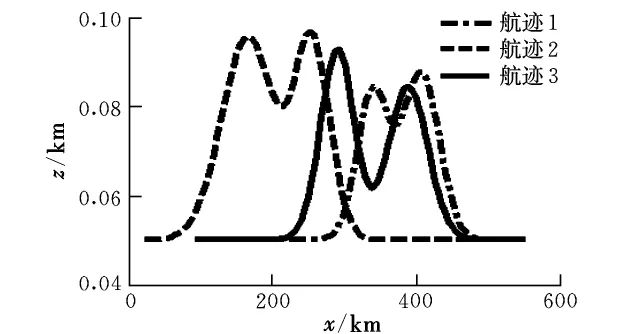
图8 3枚导弹攻击1个目标的高度曲线
6 结束语
本文提出了HPSO算法,并将其成功地用于多弹协同低空突防航迹规划。采用分解策略将多弹协同航迹规划总体结构分为两层:航迹规划层和协同规划层。在航迹规划层提出HPSO算法以规划出多条在空间上较为离散的备选航迹,协同规划层根据协同时间为每枚导弹选出合适的航迹和速度,当导弹遇到突发威胁时,则以当前位置为起点重新规划航迹。最后以3枚导弹为例,针对单目标和3个目标进行了离线和在线仿真验证,均生成了满足协同时间要求的航迹,且所得航迹弹道平缓。
[1]樊琼剑,杨忠,方挺,等.多无人机协同编队飞行控制的研究现状[J].航空学报,2009,30(4):683-691.
[2]毛云云.多飞行器协同航迹规划算法研究[D].哈尔滨:哈尔滨工业大学,2010.
[3]Eun Yeonju,Bang Hyochoong.Cooperative task assignment/path planning of multiple unmanned aerial vehicles using genetic algorithms[J].Journal of Aircraft,2009,46(1):338-343.
[4]Yan Jiangjiang,Ding Mingyue,Zhou Cheng ping.Cooperative route planning algorithm for unmanned air vehicles based on evolutionary computation[C]//Remote Sensing and GISData Processing and Applications,and Innovative Multi spectral Technology and Applications.United States:SPIE,2007.
[5]Lu Jiangsong,Wang Nan,Chen Jing.Cooperative path planning for multiple UCAVs using an AIS-ACO hybrid approach[C]//2011 International Conference on Electronic and Mechanical Engineering and Information Technology.United States:IEEE Computer Society,2011:4301-4305.
[6]马培军,毛云云,张洪涛,等.基于3DSAS的多约束多航迹协同规划与搜索方法[J].系统工程与电子技术,2011,33(7):1527-1533.
[7]Mohammad Mehdi Keikha.Improved simulated annealing using momentum terms[C]//2011 IEEE Second International Conference on Intelligent Systems,Modelling and Simulation.United States:IEEE Computer Society,2011:44-48.
[8]Wang Guoshi,Li Qiang,Guo Lejiang.Multiple UAVs routes planning based on particle swarm optimization algorithm[C]//2010 2nd International Symposium on Information Engineering and Electronic Commerce.United States:IEEE Computer Society,2010:150-154.
[9]Shu Jun,Li Jian.An improved self-adaptive particle swarm optimization algorithm with simulated annealing[C]//Intelligent Information Technology Application,Third International Symposium.United States:IEEE Computer Society,2009:396-399.
