基于FLUENT的双翼末敏弹气动特性研究
2013-08-09胡志鹏刘荣忠郭锐
胡志鹏,刘荣忠,郭锐
(南京理工大学智能弹药技术国防重点学科实验室,江苏南京210094)
0 引言
与传统有伞末敏弹相比,无伞末敏弹具有体积小、落速高、受横风影响小的优点,因而成为新一代末敏弹子弹的发展方向。无伞末敏弹通过非气动力决定稳态扫描指标如落速、扫描角及转动频率,因此在无伞末敏弹稳态扫描平台设计中,末敏弹气动特性研究是首先要突破的瓶颈。
无伞末敏弹尾翼布局有单翼和双翼两种,对单翼无伞末敏弹的研究起步较早,文献[1-5]中有充分的研究。双翼末敏弹的研究主要有瑞典博福斯公司研制的BONUS末敏弹[6]。文献[7-9]对轴向布置增阻导旋尾翼的探测器模型进行了基于风洞实验的气动特性研究。周志超等[10]设计了轴向折叠和径向折叠两种尾翼类型的子弹气动外形,进行了小迎角低速风洞实验,获得了模型在固定和旋转条件下的气动力数据。由于末敏弹的外形持殊,且其多处于大迎角飞行状态,周围的流场非常复杂,难以用理论方法获得末敏弹的气动特性参数。目前国内外对无伞末敏弹的空气动力学研究主要基于试验方法获得气动力数据。随着计算流体力学(CFD)的不断发展以及计算机硬件技术的突飞猛进,采用数值方法模拟此类问题已成为可能[11-12]。
本文利用CFD方法[13]结合自由飞行试验来研究典型双翼末敏弹气动特性。以一种典型双翼无伞末敏弹气动外形为研究对象,利用CFD软件FLUENT建模求解末敏弹流场,并加工模型进行高塔投放自由飞行试验,结合数值计算结果对双翼末敏弹静态和动态气动特性进行分析,研究双翼无伞末敏弹气动特性规律,为改进末敏弹稳态扫描平台的设计提供依据。
1 模型及计算方法
1.1 双翼末敏弹气动外形
模型为图1所示的圆柱型弹体,尺寸Ø110 mm×135 mm。弹体尾部安装两片尾翼W1和W2,尾翼W1翼展 Lw1=110 mm,弦长 Lb1=260 mm;尾翼 W2翼展Lw2=110 mm,弦长Lb2=160 mm。以图1中坐标系为准,尾翼弯折角按如下规则产生:以z轴正向为末敏弹转动正向,xy平面为尾翼基准面,W1尾翼前缘由y轴正向向z轴正向弯折,尾翼后缘由y轴负向向z轴负向弯折,成S形,尾翼W2两端朝向弹头部弯折成C形。
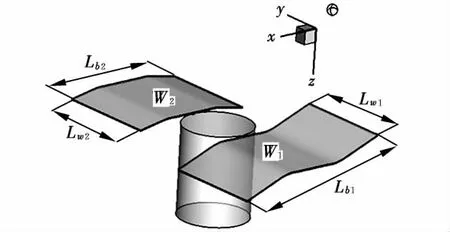
图1 模型结构图
1.2 流场计算域网格
流场计算域为圆柱体,为减小流场边界影响,轴向取20倍弹长,径向取15倍弹径。根据末敏弹外形和流场特性布置网格的疏密,尾翼作为主要的气动阻力作用部位,在尾翼表面布置边界层网格来控制和提高网格密度。弹体尾翼结合处由于外形非常复杂,生成非结构网格,便于在FLUENT计算中网格自适应以提高计算精度。
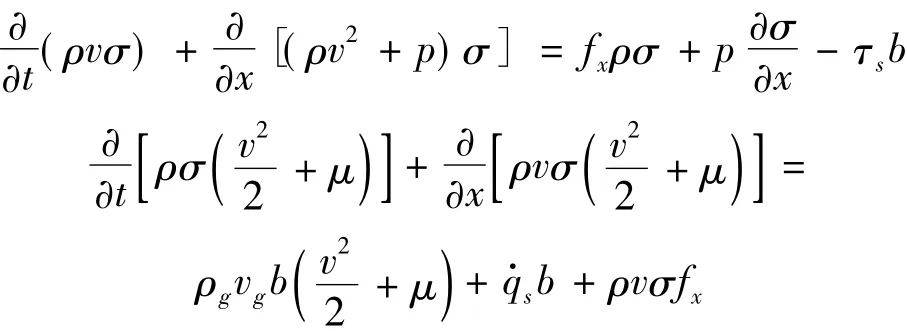
1.3 FLUENT控制方程
数值计算所建立基本守恒方程组为一般流体力学所具有的质量守恒方程、动量守恒方程、能量守恒方程。在这些守恒方程的基础上,加上必要的辅助方程就构成了控制方程[13]:

1.4 边界条件
来流边界条件为:对于入口,给定来流的总压和总温边界条件,而速度采用外推。对于亚声速出口,给定出口压力,其余参数采用特征边界条件外推。物面边界条件采用绝热壁假设和无滑移条件。
2 计算结果及分析
2.1 双翼末敏弹流场特性分析
图2是速度为30 m/s,转速为12 rad/s的条件下,迎角和侧滑角均为0°时的模型表面压力分布云图。可以看出,高压区主要分布在弹头部表面、尾翼迎风面和弹体尾翼连接处。低压区主要位于弹体圆柱部侧表面、弹体底部和尾翼背风面。C形尾翼高压区布满整个尾翼迎风面,高压区向低压区的过渡范围很小,尾翼弦向边缘压力梯度变化大。高压区的增大使末敏弹弹体获得更大的阻力,从而更适合其增阻的目标要求。S形尾翼的不同弯折角结构,导致弦向两侧压力分布具有不同的形式。尾翼前缘高压区面积较大,翼后缘由于流动受阻较小流速较快,压力分布呈现明显的递减状态。S形尾翼前后缘的不同压力分布状态使尾翼的压力中心向翼前缘移动,同时使弹体获得了一个绕自身轴的转动力矩。
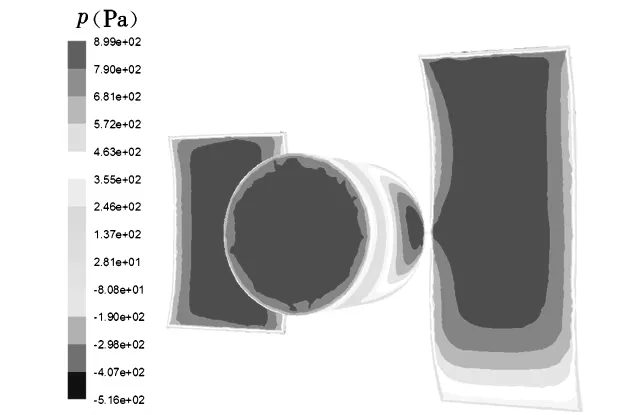
图2 模型表面压力分布云图
图3为模型流线图,由图可见,来流在达到弹头部时,气流受阻压缩后速度降为0,形成驻点,使弹头部平面中心部位形成高压区。绕过弹头部的气流和远场来流在尾翼迎风面形成驻点,在尾翼中心部位形成较大面积的高压区。气流在弹顶平面与圆柱面相接处产生涡,使这一部位形成低压区。受弹体和翼的相互干扰作用,气流在尾翼处转折,在弹、翼连接处又产生了一个高压区。由于涡的存在,翼前弹体圆柱侧面靠近头部处压强较小。
图4显示了模型表面压力分布随迎角变化过程。由图可知,随着迎角增加,弹头部高压区逐渐向C形尾翼一侧移动,高压区范围减小。C形尾翼高压区向翼边缘移动,高压区面积减小。S形尾翼高压区变化剧烈,随着迎角增加高压区移向翼前缘,当迎角增加到30°后,尾翼后缘出现高压区。随着迎角增大,S形尾翼高压区范围和压力值明显降低。
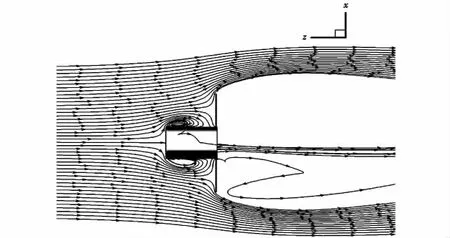
图3 模型迎角平面(xz平面)流线图
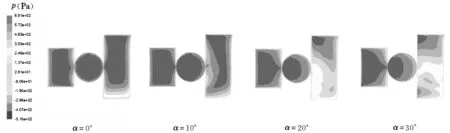
图4 不同迎角模型表面压力分布云图
2.2 阻力特性分析
计算无量纲的空气动力和力矩系数时,特征长度取弹体圆柱部长度135 mm,特征面积取圆柱体横截面积0.009 5 m2。气动外形的阻力系数在迎角为-30°~30°时的变化曲线如图5所示。
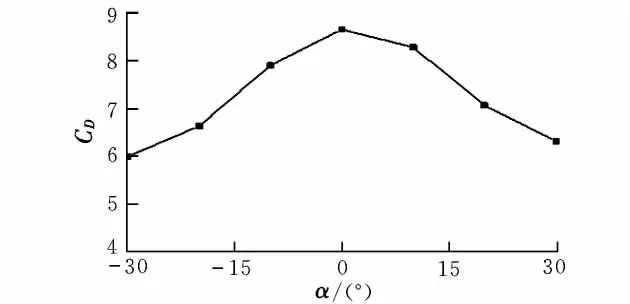
图5 阻力系数随迎角变化曲线
由图可见,在迎角-30°~30°范围内,阻力系数分布在6~9之间。迎角由-30°增加到0°,模型阻力系数逐渐增大,迎角为零时达到最大值,而后随迎角的增加又逐步减小。平头圆柱的零升阻力系数CD0≈0.7~1.0,加装尾翼后,模型的阻力系数大幅提高。尾翼对末敏弹的增阻效果非常明显。
迎角为正时的阻力系数略大于迎角为负时的值,原因在于两个尾翼的大小并不相等,气流吹过时弹体对两个大小不同尾翼的阻挡作用不同。因此,在设计末敏弹时应尽量使得弹体的惯量主轴偏向正迎角方向。
2.3 升力特性分析
图6为模型升力系数随迎角变化曲线。迎角由-30°增加到30°时,模型的升力系数逐渐减小,呈斜率为负的线性变化。升力系数的正负转折点大约发生在迎角为0°的时刻。
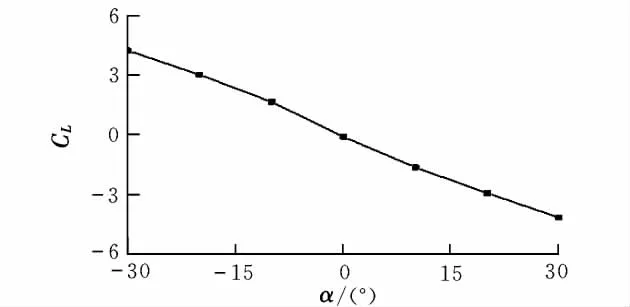
图6 升力系数随迎角变化曲线
2.4 转动力矩特性分析
图7为模型的转动力矩系数曲线。由图可见,末敏弹的转动力矩随着迎角的增加逐渐减小,最大值出现在迎角为-30°时,迎角为30°时转动力矩最小。末敏弹S形尾翼两端以一定角度弯折,气流在尾翼弦向产生推力,形成转动力矩。S-C形尾翼末敏弹的尾翼折角面,一部分被弹体阻挡,因此迎角变化时,转动力矩同时发生变化。
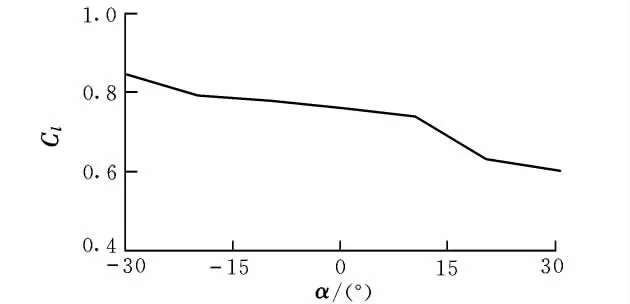
图7 转动力矩系数随迎角变化曲线
3 动态气动特性研究
通过模拟结果分析了静态条件下双翼末敏弹气动特性,为进一步研究双翼末敏弹动态气动特性,对数值计算的气动外形加工样弹进行高塔投放的自由飞行试验。测得末敏弹模型飞行速度、转速等运动参数,通过弹道参数辨识模型的气动力参数,研究双翼末敏弹模型动态气动特性。
3.1 末敏弹模型及试验条件
试验末敏弹模型为凹头圆柱体。半径为56 mm,高度为135 mm,质量为4.2 kg,以90°安装角布置两片尾翼。末敏弹模型从高为100 m的塔顶投放,视场内标志物间隔及距地面高度已知。弹丸飞行过程由高速录像机记录,用于对模型的下落速度进行处理和模型空中运动姿态的观察。弹体内部配有记录转动数据的测试仪,用以记录模型的转动运动过程。
3.2 试验结果及分析
3.2.1 模型动态气动参数
通过对高速录像数据和弹载测试仪数据进行处理,得到模型三次自由飞行试验的阻力系数CD与转动力矩系数Cl如表1所示。
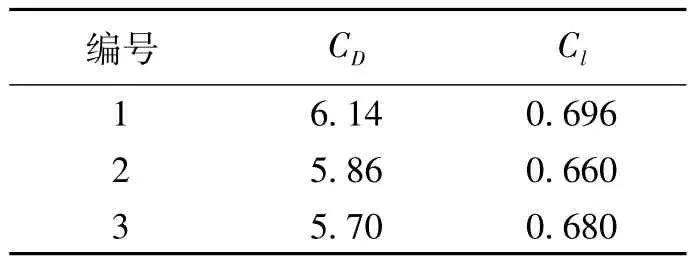
表1 模型试验结果
数据显示,试验测得模型阻力系数分布范围为5.70~6.14,增阻效果明显。表明动态条件下,双翼末敏弹气动外形产生的阻力系数可以产生平衡自身弹重的阻力,实现末敏弹减速的要求。
转动力矩系数试验结果表明,末敏弹在运动过程中获得z轴正向的转动力矩,形成绕z轴正向的转动。自由飞行试验初始状态下模型转动速度为0,因而转动力矩系数为正时能够使末敏弹模型转动速度增加并达到目标要求。实际末敏弹由母弹抛出时转速很高,经过一级减旋后仍然有剩余转速,考虑这一情况,模型的转动力矩系数设计是存在不足的。
3.2.2 模型飞行姿态
图8为双翼末敏弹自由飞行试验姿态变化过程。从图中可以看到,双翼末敏弹模型飞行过程中弹体绕自身轴线转动的同时,弹轴亦以某条线为轴转动。一个转动周期内,弹轴与铅垂轴始终存在一个角度。这种运动特征是末敏弹扫描运动的基本形式。通过改进模型尾翼参数,使末敏弹自转角速度与弹轴绕铅垂轴转动速度相同,并且模型弹轴与铅垂轴形成的角度不变,便形成稳态扫描运动。此时,在弹体上安装与弹轴指向相同的敏感器,伴随末敏弹的降落和绕铅垂轴的转动,敏感器在地面形成螺旋线的扫描轨迹。
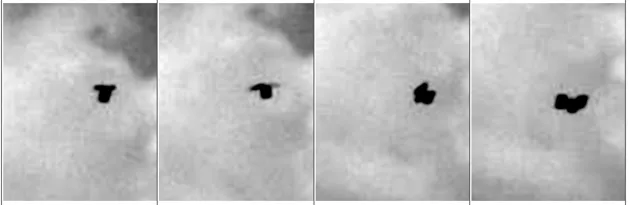
图8 S-C翼片末敏弹飞行转动一周姿态
对自由飞行试验过程进行研究可以发现,末敏弹实现稳态扫描运动需要的基本气动特性要求为:
末敏弹最佳扫描角约为30°,大迎角时同样具有动态稳定性才能保证末敏弹在稳态扫描运动过程中不发生失稳。从试验结果来看,试验模型能够满足这一要求,末敏弹迎角在30°上下变动而末敏弹下落过程未发生失稳翻转等现象。
末敏弹由母弹抛出后,以较高速度绕弹轴转动。为了实现稳态扫描运动,需要有足够的力矩使弹体的转动轴线与惯性主轴重合,同时力矩将惯性主轴方向调整到铅垂轴方向。为使模型转动轴线与惯性主轴方向一致,升力和侧向力需要足够大。为使惯性主轴方向转向速度矢量方向,俯仰力矩要随着迎角增加而减小,随着侧滑角增加而增加。偏航力矩需要随着迎角和侧滑角的增加而增加。
模型飞行速度、转动速度和迎角的关系对模型空中姿态非常重要。当模型从母弹抛出后,转速阻尼必须为正且足够大使其能够对应速度的降低。迎角增加时转速变化不能过大,转速增加可使末敏弹产生陀螺稳定,导致弹体惯性主轴转向铅垂轴的过程延长。当转速过高时,甚至不能再使惯性主轴移到铅垂轴方向上。为保证模型产生的力和力矩能够有效快速地改变末敏弹运动姿态,末敏弹模型的转动惯量比也不能设计的很大,在1.1左右较为理想。
4 结论
本文通过数值计算对双翼末敏弹气动外形的静态气动特性进行了分析,基于自由飞行试验的动态气动特性研究得出结论:双翼末敏弹增阻效果明显,能够提供平衡弹体自身重量的阻力,实现减缓末敏弹减速的目标要求。S-C组合尾翼提供的力和力矩能够使末敏弹绕自身弹轴转动的同时弹轴产生公转,迎角保持一定范围内,具备了扫描运动的基础。模型在满足扫描角前提下有很好的静稳定性和动稳定性。
[1]Dashcund D.IRAAM wind tunnel test taskⅢ[R].New Jersey,USA:Avco Corporation Avco Systems Division,1983.
[2]Koenig W,Kline R.A Samara-type decelerator[R].AIAA-84-0807,1984.
[3]Crimi P.Finite element analysis of a Samara-wing decelerator[J].Journal of Aircraft,1996,33(4):793-802.
[4]Crimi P.Analysis of Samara-wing decelerator steady-state characteristics[J].Journal of Aircraft,1988,25(1):41-47.
[5]舒敬荣.非对称末敏子弹大攻角扫描特性研究及应用[D].南京:南京理工大学,2004.
[6]Karlsen L,Borgstrom D,Paulsson L.Aerodynamics of a rotating body descending from separation position of an artillery munition shell[C]//11th AIAA Aerodynamic Decelerator Systems Technology Conference and Seminar.San Diego,CA,1991:288-294.
[7]Vicente N M,Angel SA,Alvaro C.Model of the aerodynamic behavior of a pararotor[J].Journal of Aircraft,2006,43(6):1-15.
[8]Vicente N M,Angel SA,Alvaro C.Experimental investigation of an autorotating-wing aerodynamic decelerator system[C]//18th AIAA Aerodynamic Decelerator Systems Technology Conference and Seminar.Munich,Alemania,2005:1-15.
[9]Vicente N M,Piechocki J,Cuerva A,et al.Experimental research on a vertically falling rotating wing decelerator model[R].AIAA-2007-2538,2007.
[10]周志超,赵润祥.不同尾翼灵巧子弹气动特性实验研究[J].实验流体力学,2010,24(4):52-55.
[11]袁先旭,张涵信,谢昱飞.基于CFD方法的俯仰静、动导数数值计算[J].空气动力学学报,2005,23(4):458-463.
[12]Costello M,Gatto S,Sahu J.Using CFD/RBD results to generate aerodynamic models for projectile flight simulation[R].AIAA-2007-6582,2007.
[13]任玉新,陈海昕.计算流体力学基础[M].北京:清华大学出版社,2006:3-4,9.