基于MATLAB的装载机快换装置优化设计*
2013-06-28关丽杰郜云波赵伟民
关丽杰,郜云波,赵伟民
(东北石油大学,黑龙江 大庆 163318)
1 引言
装载机快换装置是连接工作装置与机具的重要部件,主要有机械式,液控式,气控式三种,目前应用较多的为液控式快换装置,如图1所示。快换装置作为多功能装载机的关键部件,可使装载机快速更换各种机具,实现一机多用,节约空间和资源,减少吊装拆卸时间,提高了工作效率。随着近年来国家经济和基本建设的迅猛发展,装载机快换装置的应用越来越广,作用越来越大,同时对其安全性等要求也越来越高。新型方便快捷,安全可靠,可更换多种机具的快换装置的研发将是装载机行业发展的必然趋势。
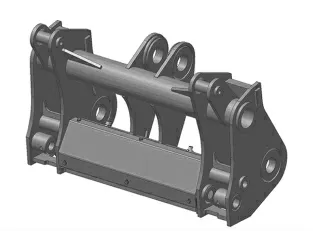
图1 液控式装载机快换装置
2 目标函数分析
装载机的掘起力是很重要的动力学指标。系统压力一定时,机构的传力比决定掘起力的大小。为了提高掘起力,选择铲斗在地面放平时机构的传力比作为目标函数。
2.1 装载机传力比分析
如图2所示为带有快换装置的装载机工作装置力学模型。连杆机构传力比CF为:


图2 工作装置力学模型
通过对前述传力比的计算可知,要使传力比最大,即L1最小。
2.2 快换装置及机具受力分析
考虑到计算的简化,采用最为恶劣的两种工况:插入和掘起联合工况,只要满足这种工况,其他任何情况都会满足[1]。铲斗为装载机最为常见的机具,文章以铲斗作为机具代表进行受力分析。
(1)铲斗受力分析 铲斗受力如图3所示。由平面力的平衡条件列平衡方程得:
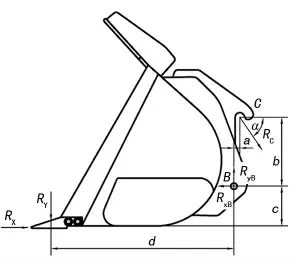
图3 铲斗受力图

(2)快换装置受力分析 经铲斗受力计算可知RC、RxB、RyB,铰点D、E为快换装置与连杆及动臂连接处,快换装置受力如图4所示。
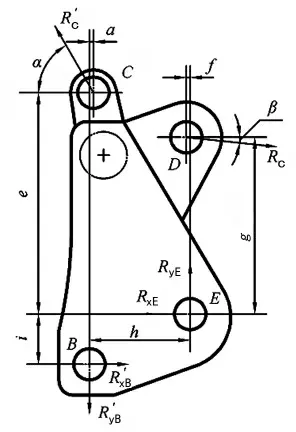
图4 快换装置受力图
由:
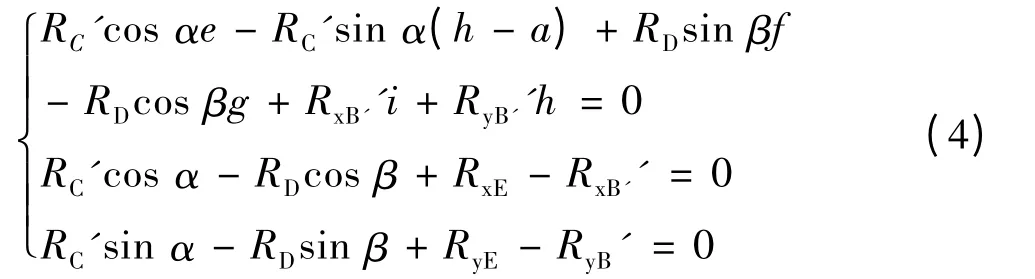
得:
3 设计变量分析
文章以Z30E型装载机为例,优化一种通用型快换装置,为保证装载机的工作性能,不改变反转六杆机构的各铰点位置,因此D、E点位置不变,确定B、C铰点的位置即为确定快换装置各铰点的位置。选择如下设计变量:

4 确定约束条件
4.1 强度约束
装载机快换装置是实现装载机多功能性的重要部件,是复杂受力构件,其强度、刚度设计很重要,一旦因总体强度设计不足而造成扭曲或断裂故障,就将难以修复,甚至造成安全事故。因此快换装置总体设计的强度和刚度一般足够大,不会出现扭转或突然断裂现象[2]。
由于在铲掘联合工况下,动臂不动,快换装置可看做是支承在动臂铰接点E点和连杆铰接点D点的双支点悬臂梁,经过铲斗后边缘处断面最为薄弱,该平面为危险断面,此断面上的正应力为:

式中:M为断面处的弯矩;F为断面处的轴向力;W为断面处抗弯截面系数;A为断面处截面积;δ为材料屈服极限。
销轴支座的挤压应力为:

式中:许用应力[σ]按下式计算,即:

式中:P1为铰点所受载荷;L1为轴孔厚度;d为轴的直径;σs为材料的屈服极限;n为安全系数。
快换装置材料通常为Q345,σs=345 MPa,考虑工程机械工作繁重,条件恶劣,以及计算上的误差,通常n>1.5。根据情况,可取n=1.8。
4.2 几何外形约束
充分考虑整机尺寸及工作装置布置可能性要求,设计中应给出各设计变量允许变化空间范围[3]。由于快换装置的两前铰点限制在机具的外形后侧,两后铰点与装载机动臂与连杆的前铰点在铲掘联合工况时的绝对位置一致,此外,为使传力比最大,前上铰点高于后上铰点的位置,前下铰点低于后下铰点。
4.3 运动约束
要求满足连杆机构运动的协调性、避免可能存在的运动干涉。为保证装载机的收斗角的要求,在掘起工况时达到收斗角,此时快换装置与动臂易于造成干涉,影响斗容量的实现,因此快换装置与动臂和挂钩的铰接点与水平面要成相应的角度,以免干涉,造成快换装置和动臂的碰撞磨损,影响装载机的工作性能。如图5所示,θ为装载机的收斗角,φ为快换装置BE与动臂不干涉时与竖直面的最大角度,因此,在铲掘联合工况时BE与水平面的角度为θ-φ。
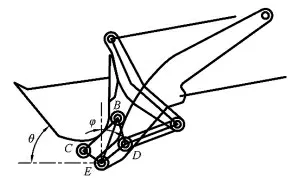
图5 装载机极限收斗时快换装置与动臂不干涉的情况
4.4 可靠性约束
由于快换装置的B铰点要与机具的挂钩相铰接,为了防止脱钩和钩子断裂的情况,在铲掘联合工况下,钩的受力方向要在钩与销轴接触面的中心位置,令该力的方向与水平面呈锐角ψ。
5 装载机快换装置优化实例及结果分析
Z30E装载机最大掘起力96 kN,最大牵引力为83 kN、参照图6Z30E装载机的主要结构尺寸如表1。

图6 简化快换装置与铲斗尺寸图

表1 Z30E装载机主要结构尺寸
根据快换装置数学模型可知,该优化属于有约束非线性优化问题,此类问题可调用MATLAB优化工具箱中的fmincon函数求解。用MATLAB实现数学模型求解。
(1)编写目标函数的M文件(khzzyh.m)
functionf=khzzyh(x);
f=x(1)+x(5);
(2)编写约束函数的M文件(khzzyha.m)
function[C,Ceq]=khzzyha(x);
aa=(48000*x(1)+41500*x(2))/(x(3)*cos(pi/3)+x(4)*sin(pi/3));
bb=aa*cos(pi/3)+41500;
cc=aa*sin(pi/3)+48000;
dd=sqrt(bb^2+cc^2);
ee=(aa*cos(pi/3)*(x(2)+x(3)-195)-aa*sin(pi/3)*(x(5)-x(4))+bb*(195-x(2))+cc*x(5))/(350*cos(pi/18));
ff=-aa*cos(pi/3)+bb+ee*cos(pi/18);
gg=-aa*sin(pi/3)+ee*sin(pi/18)+cc;
hh=sqrt(ff^2+gg^2);
C=[aa/2400-192;dd/2400-192;ee/2400-192;hh/2400-192;480^2-(x(2)-430)^2-(x(1)-514)^2;480^2-(x(2)+x(3)-430)^2-(x(1)+x(4)-514)^2;
-(bb*(430-x(2))-ff*235)/(20*(x(5)+x(1)-944-(430-195)*tan(25.4*pi/180))^2/6)+(aa*sin(pi/3)+gg)/(20*(x(5)+x(1)-944-(430-195)*tan(25.4*pi/180)))-192;
-(aa*cos(pi/3)*(x(2)+x(3)-430)-ee*cos(pi/18)*115)/(20*(x(5)+x(1)-944-(430-195)*tan(25.4*pi/180))^2/6)+(aa*sin(pi/3)+gg)/(20*(x(5)+x(1)-944-(430-195)*tan(25.4*pi/180)))-192];
Ceq=[];
(3)在命令窗口中编写调用主程序
x0=[1000,150,640,30,350];
A=[0-1-1 0 0;-tan(42*pi/180)-1-1-tan(42*pi/180)0;0 0 0 1-1;0 1 0 0 0];b=[-545;-1471;0;195];
lb=[842 80 350 0 0];ub=[inf 195 800 inf inf];
options=optimset('Display','iter','Algorithm','active-set','TolX',1e-004,'TolCon',1e-015);[x,fval,exitflag,output]=fmincon('khzzyh',x0,A,b,[],[],lb,ub,'khzzyha',options)
其中,aa,bb,cc,dd,ee,ff,gg,hh分别表示各铰点的力RC,RxB,RyB,RB,RD,RxE,RyE,RE经MATLAB运算可得出优化结果,优化后各变量值如表2所列。优化前后各铰点力及目标函数值对比如表3所列。

表2 优化后各变量值
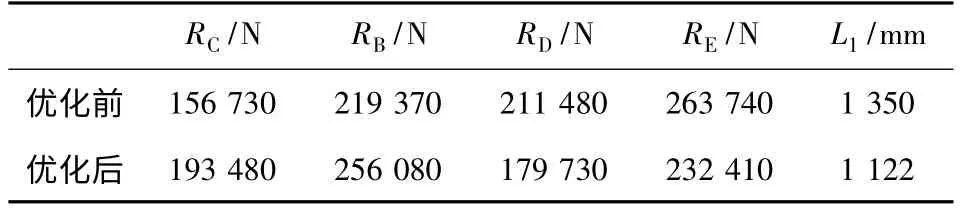
表3 优化前后各铰点力及目标函数值对比
从表4中可以看出D、E点的力都明显下降,而D、E点为受力较大的点,因此改善了快换装置整体受力情况,此时L1=1 122 mm,为满足情况的最小值,也就是达到了传力比最大的效果,提高了装载机的工作性能。
6 结论
结果表明,利用文章所建立的优化数学模型对快换装置的铰点位置的优化设计是可行的,快换装置受力较大的D、E铰点的力有所减低,改善了快换装置的受力情况,提高了快换装置的安全可靠性,为快换装置的设计提供了一种方便、实用的优化设计方法。对于工程实践中的许多优化问题,尤其是结构参数优化问题,可以使用MATLAB的优化工具箱来求解,并且不需编写大量算法程序,提高了设计效率,获得了良好的优化结果[4]。
[1] 石沛林,徐冠林,张立荣.ZL50型装载机铲斗的应力分析与结构优化设计[J].工程机械,2008(39):29-33.
[2] 夏兆沂,刘 崇,韩其章.装载机动臂薄弱点的应力分析[J].工程机械,2009(40):28.
[3] 刘 颖,张荣沂,赵鹤飞.基于MATLAB的装载机举升机构的优化设计[J].黑龙江工程学院学报,2007,21(2):66.
[4] 陈满意,陈定方.基于MATLAB的铝合金车轮花键套优化设计[J].科学技术与工程,2012,12(27):7144.
