3-SPS-S三自由度并联机构静动态特性分析*
2013-06-28闫炳宽
闫炳宽,张 楠
(新兴河北工程技术有限公司,河北 邯郸 056017)
1 引言
并联机构具有结构简单、刚度大、精度高、高速性能好等优点,可作为实现自动化、高速化和柔性化生产的新型装备[1]。广泛应用于工程机械、船舶以及航空航天等领域。李育文等[2]以6-UPS平台并联机构为对象,利用ANSYS建立了末端执行器在不同位形处的刚度模型,得到整机静刚度在工作空间中的分布规律。吕亚楠[3]等人采用有限元法建立了一种六自由度并联机床的刚度简化模型,研究了机构不同位形时的静刚度分布规律。但都采用了梁单元,忽略了机架、铰链部件的弹性。
并联机构的刚度影响其静、动态特性和负载下的定位精度,因常用于高精度或高负载的场合,所以正确的关节空间和操作空间的刚度分析显得尤为重要[4]。鉴于机械结构几何形状和边界条件的复杂性,通常需要有限元法对其刚度进行建模和计算[5]。笔者就空间转动型3-SPS-S三自由度并联机构进行有限元刚度分析,使其更加广泛应用于工业领域。
2 系统介绍
3-SPS-S三自由度并联机构是由动平台、定平台、3条SPS支链和中间恰约束S球副组成。其中S代表球副,P代表移动副。如图1所示,每条支链由2个球副和1个移动副组成,并与定平台形成一定的夹角,这样就能实现3个方向的转动,即动平台有3个自由度。中间恰约束链由球铰将动平台与定平台连接起来。在实际工况中,中间铰链只提供约束,并不承受载荷,驱动力由移动副提供。
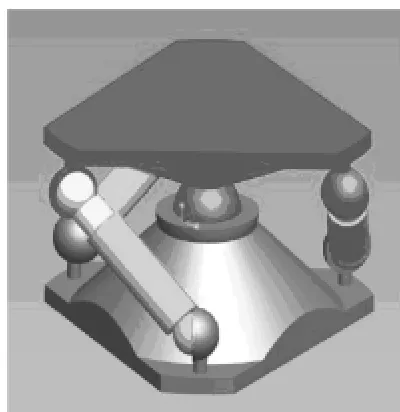
图1 3-SPS-S三维实体图
3 建模策略
利用Pro/E对3-SPS-S三自由度并联机构建立三维实体模型,利用Pro/E的组件装配功能,将各个零件按照具体运动副要求装配到一起,然后利用其与ANSYSWorkbench进行无缝对接,实现了CAD与CAE优势互补,节省了大量的时间和资源。将Pro/E实体模型导入ANSYSWorkbench后,利用Workbench提供的Connection选项中的Sphere将实际球副的接触球面和半球面连接。因为是静力学的分析,所以杆件的移动副设置为2个杆件的固定,利用Fixed将杆件的2个接触面固定[6]。考虑ANSYS软件只能计算有限离散位形的静、动态特性,因此仅取3个典型的位置进行有限元分析。上平台中心点A的3个位置为Ⅰ(0,0,0.5)、Ⅱ(0,0.25,0.43)、Ⅲ(0.25,0,0.43)。3-SPS-S结构简图如图2所示。
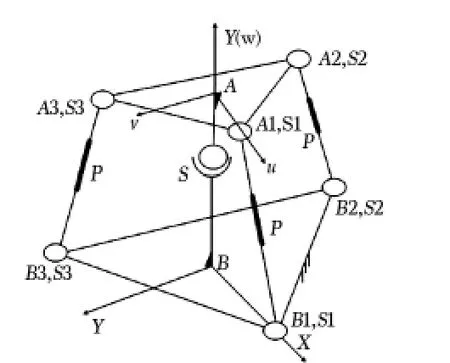
图2 3-SPS-S结构简图
4 静态特性评估
依据上述操作,对三自由度并联机构进行有限元静刚度分析,定义系统沿3个方向(X、Y或Z)的单向刚度为在受力点沿该方向施加单位力所引起的同向线变形的倒数。施加外力载荷为30 N,上下平台的材料弹性模量210 GPa,泊松比为0.3。杆件的材料弹性模量为210 GPa,泊松比为0.28。根据3个典型位置的参数,可得3-SPS-S三自由度并联机构的单向刚度。从得到的数据及图形结果可知,3-SPS-S三自由度并联机构的静刚度分布规律:在位置Ⅰ,Y方向刚度最大是因为受到的载荷为-Y方向,并且3条支链同时受力。在X方向刚度最小,只有单1支链承受。在位置Ⅱ上,Z方向刚度最小,原因是此时其中1条SPS支链最长。位置Ⅰ、Ⅱ、Ⅲ单向位移图如图3~5所示。

图3 位置Ⅰ单向位移图
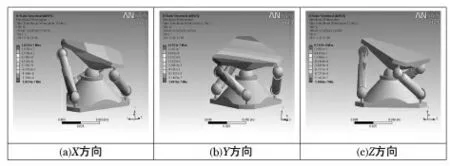
图4 位置Ⅱ单向位移图
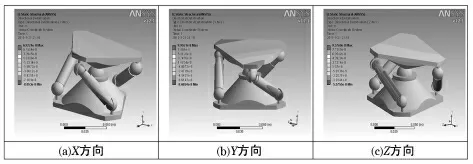
图5 位置Ⅲ单向位移图
5 动态特性
利用ANSYSWorkbench提供的Modal模块,对3-SPS-S三自由度并联机构进行模态分析,得到前6阶系统的固有频率。表1为3-SPS-S三自由度并联机构在位置Ⅰ(0,0)Ⅱ(-π/2,h)Ⅲ(0,h)的固有频率,图6为3个位置的前6阶固有频率变化趋向图。

表1 前6阶模态频率比较 /Hz

图6 前6阶模态频率趋向
从表1和图6中可得,3-SPS-S三自由度并联机构在3个典型位置固有频率总体变化较小,可认为整个工作空间总体变化较小。在工程应用中,可认为3个位置的固有频率是相同的,并且需要避开驱动部件的震动频率从而避免共振现象的出现[7]。
6 结论
以3-SPS-S为研究对象,分析了含约束链的并联机构静态特性及动态特性,研究了并联机构快速建模的策略及技术问题。在对并联机构的有限元分析当中,只能限制有限离散位形的有限元分析,在对每一个位形的分析中,都需要重新进行一次网格的划分,这降低了分析计算效率,怎样解决整机模型的快速精确建模问题,需要进一步完善。
(1)借助ANSYSWorkbench对整机模型在任务空间进行静、动态分析,得到系统各向刚度特性和固有频率。
(2)应用ANSYS Workbench提供的Connection设置模块,找到一种快速处理各种铰链的有限元精确分析方法。
[1] 王友渔,赵兴玉,黄 田,等.可重构混联机械手Trivariant与Tricept的静动态特性预估与比较[J].天津大学学报,2007,40(1):41-45.
[2] 李育文,张 华,杨建新,等.6-UPS并联机床静刚度的有限元分析和实验研究[J].中国机械工程,2004,2(15)112-115.
[3] 吕亚楠,王立平,关立文.一种冗余并联机床静刚度有限元分析与优化[J].机械设计与制造,2008,2(2):1-3.
[4] Yanwei Zhang,Guohua Cui.Singular Loci Analysis of 3-SPS-S Spatial Rotation Parallel Manipulator[J].Transaction of Chinese Society for Agricultural Machinery,2010,41(4):199-203.
[5] 魏永康,王知行.并联机床结构静刚度的有限元分析[J].机械与电子,2004,10(4):16-19.
[6] Dan Zhang,Zhen Gao.Hybrid Head Mechanism of the Groundhog-like Mine Rescue Robot[J].Robotics and Computer-Integrated Manufacturing,2011(27):460-470.
[7] Dan Zhang,C.M.Gosselin.Kinetostatic Modeling of N-DOF Parallel Mechanisms with a Passive Constraining Leg and Prismatic Actuators[J].Journal of Mechanical Design,2001(123):375-381.
