基于恒星观测的船载雷达精度检验方法❋
2013-06-27钟德安张同双冯鸿奎茅永兴
钟德安,张同双,冯鸿奎,茅永兴
(1.中国卫星海上测控部,江苏江阴214431;2.飞行器海上测量与控制联合实验室,江苏江阴214431)
基于恒星观测的船载雷达精度检验方法❋
钟德安1,2,❋❋,张同双1,2,冯鸿奎1,茅永兴1,2
(1.中国卫星海上测控部,江苏江阴214431;2.飞行器海上测量与控制联合实验室,江苏江阴214431)
针对传统的船载雷达精度检验方法存在诸如协调量大、不能经常进行的不足,提出了基于恒星观测的船载雷达精度检验方法。该方法以安装于船载雷达天线的星敏感器观测恒星的数据为比对基准。推导了将星敏感器光轴在J2000.0地心惯性坐标系中的指向,转换为以船载雷达三轴中心为原点的地平系中指向的公式。针对被跟踪目标在星敏感器中可见和不可见,给出了两种不同的光电偏差修正方法。外场试验结果表明,利用该方法检验雷达精度得到的结果与利用精轨卫星相比,残差小于0.3′,满足对雷达精度检验的要求。该方法不仅可实现雷达精度检验的经常性,也可提高雷达精度检验的实时性和有效性。
船载雷达;精度检验;恒星观测;光电偏差;星敏感器
1 引言
船载雷达的精度检验是海上测控技术的重要组成部分,通常采用飞机校飞的方法进行,但该方法制约因素多,不可能经常进行。利用精轨卫星(或其他空间目标)对雷达测角精度进行检验是取代飞机校飞的一个可行途径,具有组织实施简便、鉴定结果置信度高等优点,但该方法所需卫星精密星历数据的获取有一定难度,且卫星轨道过高时会超出某些设备的作用距离。
星敏感器是最精密的姿态测量部件,广泛应用于卫星等空间飞行器(如美国Lockheed Martin公司的AST-301[1]星敏感器)和导弹等军事领域(如法国SODERN公司的SED20星敏感器),星敏感器在飞行器的姿态测量和控制系统中发挥了非常重要的作用[2]。星敏感器是以恒星为参照系、以星空为工作对象的高精度空间姿态测量装置,通过探测天球上不同位置的恒星并进行解算,为卫星、洲际战略导弹、宇航飞船等航空航天飞行器提供精确的空间方位和基准,并且与惯性陀螺一样都具有自主导航能力,具有重要的应用价值,传统上星敏感器多用于卫星等空间飞行器的姿态测量[3]。由于星敏感器的诸多优点,近年国内外开始研究星敏感器在大气层内应用的可行性,使星敏感器的应用领域逐渐向地面、海面扩展,特别是船用星敏感器技术已成为国内外的一个研究热点。将星敏感器作为一个测角元件,可以提供不依赖于船载雷达编码器的、独立的高精度雷达指向数据,作为雷达的比对基准,对实现船载雷达精度检验的常态化和提高精度检验的可信度具有重要意义。
本文提出了以安装于船载雷达的星敏感器观测恒星的数据为比对基准的检验新方法,以期提高精度检验的效率和可信度,实现精度检验的常态化。
2 星敏感器工作原理
如图1所示,星敏感器主要由光学系统(含图像传感器)、星图预处理模块、星图提取模块、星图识别模块及姿态确定模块等组成。

图1 星敏感器的组成Fig.1 Block diagram of star sensor
图像传感器通过光学系统拍摄当前视场内的恒星图像,星图预处理对图像信号进行降噪处理、偏置、增益调节及A/D转换,输出数字星图,然后进行阈值分割、连通性分析及亚像元细分定位,完成星点提取工作,并将得到的有效星点信息送星图识别模块进行星图识别,最后由姿态解算模块完成星敏感器三轴姿态解算[4]。
影响星敏感器姿态测量精度的因素包括光学系统像差、光电采集系统噪声、星点提取精度、光学参数标定精度、测星总数以及安装矩阵标定精度等。船用星敏感器除了需要考虑上述因素外,还需考虑坐标变换、蒙气差修正以及星敏感器甲板安装角度等因素。
根据星敏感器姿态确定算法原理,星敏感器指向测量精度明显高于横滚角测量精度,国外多数星敏感器产品的俯仰/偏航精度优于1″,而横滚测量精度优于8″,如基于CCD传感器的丹麦技术大学型号为ASC的星敏感器[5]和美国Ball公司型号为HAST的星敏感器[6];国内产品的俯仰/偏航精度也可达3″,横滚精度则可达15″。
星敏感器用于船体姿态测量时,一般需要2~3台星敏感器组合测量,才能获得高精度的船体姿态测量数据。而用于船载雷达精度检验时,只需能给出高精度的星敏感器地平指向测量信息即可,而对横滚测量精度无要求。根据现有船载测量雷达的测角精度与国内星敏感器的精度水平,星敏感器用于船载雷达精度检验在技术上是可行的。
3 星敏感器用于船载雷达精度检验方法原理
星敏感器用于船载雷达精度检验的方法原理为:在船载雷达天线的适当位置安装一星敏感器,精确标定星敏感器光轴与船载雷达机械轴、电轴间的轴系关系,当船载雷达跟踪空间目标(含标定气球、卫星及其他可跟踪目标)时,星敏感器通过观测视场内的恒星确定星敏感器光轴在地平系中的精确指向,以该指向作为比较标准检验船载雷达设备角度测量精度。
考虑到恒星的周日视运动,现有国内外的恒星星表文件一般均提供地心惯性坐标系(一般为J2000.0坐标系)下的恒星视位置,因此,直接利用星表文件的解算结果一般均为星敏感器相对J2000.0坐标系的姿态角。若要获得其他坐标系(如惯导地平坐标系)下的星敏感器姿态,则需对星敏感器姿态测量结果进行坐标变换。
4 数据处理方法
将被检验的船载雷达测量数据和星敏感器观测恒星数据分别完成相应的处理后,转到一公共坐标系中(如以船载雷达三轴中心为原点的地平系)即可开始数据比对工作,计算两者测量值之间的偏差,对比对残差进行误差统计,得到被检雷达的随机误差和系统误差。因此,数据处理包括被检验的船载雷达设备的数据处理和作为比较标准的星敏感器测量数据的处理。由于船载雷达设备的数据处理已有大量文献介绍,这里主要介绍星敏感器观测恒星数据的处理,重点介绍将星敏感器获得的其光轴在J2000.0坐标系中的指向,转换为以船载雷达三轴中心为原点的地平系中指向的方法(包括方位角、俯仰角两个参数),从而具备与经过轴系误差、零位误差等各种误差修正后的船载雷达设备测量数据进行比对的条件。
4.1 坐标转换
4.1.1 星敏感器光轴指向数据坐标转换流程
星敏感器获得的光轴指向是在J2000.0坐标系中的,将其转至惯导地平系的流程如图2所示,需依次经岁差修正转至瞬时平赤道地心系,经章动修正转至瞬时真赤道地心系,经地球自转修正转至准地固坐标系,经极移修正转至地固坐标系,最后通过修正船位转至惯导地平坐标系。
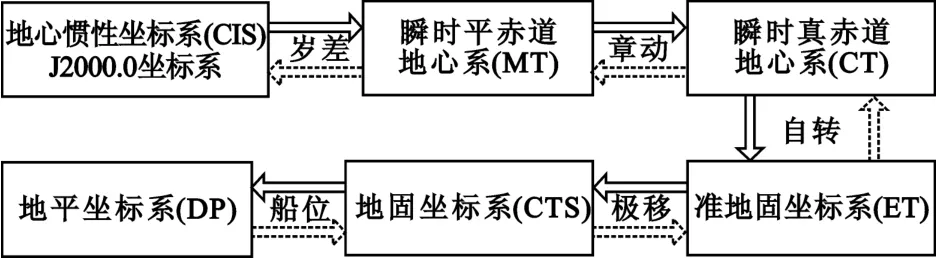
图2 星敏感器光轴坐标转换流程Fig.2 Coordinates transformation flow chart of the optical axis of star sensor
4.1.2 基本旋转矩阵
两个空间直角坐标系之间的变换,一般可通过平移和旋转来完成。基本的坐标系旋转矩阵如式(1)~(3)所示,分别表示绕X轴逆时针旋转γ角、绕Y轴逆时针旋转β角和绕Z轴逆时针旋转α角。

4.1.3 星敏感器光轴在J2000.0坐标系中的指向转换为直角坐标
以光轴在J2000.0坐标系中指向上单位矢量的端点为例进行转换(这不失一般性),则单位矢量端点的直角坐标为

式中,ACIS、ECIS分别为星敏感器光轴在J2000.0地心惯性坐标系中指向的方位角和俯仰角。
4.1.4 J2000.0坐标系(CIS)转瞬时平赤道地心系(MT)
J2000.0坐标系和瞬时平赤道地心坐标系(MT)的差异是由岁差引起的,转换矩阵A为

式中,zA、ζA为赤经岁差,θA为赤纬岁差,计算公式如下:
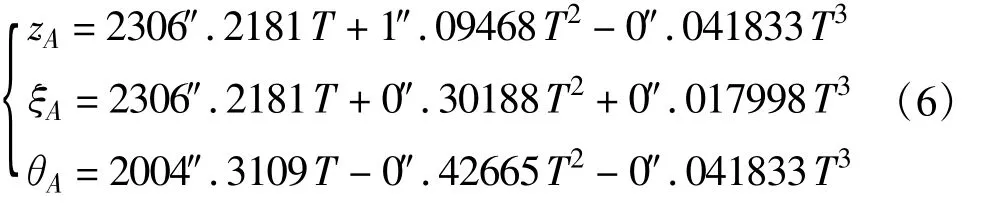

式中,JD(TT)为地球时TT起算的儒略日(Julian Day,JD)。
4.1.5 瞬时平赤道地心系(MT)转瞬时真赤道地心系(CT)
瞬时平赤道地心系(MT)与瞬时真赤道地心系(CT)间的差异是由章动引起的,转换矩阵B为

式中,εA为平黄赤交角,εA=ε-Δε,Δε为交角章动,Δψ为黄经章动。采用人造卫星简化章动模型时,计算公式为

式中,l、F、D及Ω分别为月球平近地点角、太阳平近地点角、月球平升角距、日月平角距和月球轨道升交点黄经,具体计算公式如下:

式中,ε为360°所对应的角秒,1τ=360°=1296000″。
考虑岁差影响的黄赤交角ε的计算公式为

4.1.6 瞬时真赤道地心系(CT)转准地固坐标系(ET)
瞬时真赤道地心坐标系(CT)与准地心固联坐标系(ET)间的差异是由地球自转引起的,转换矩阵C为

式中,GAST为格林尼治真恒星时,计算公式如下:
式中,T为地球时TT起算的儒略世纪数:

式中,GMST为格林尼治平恒星时,计算公式如下:
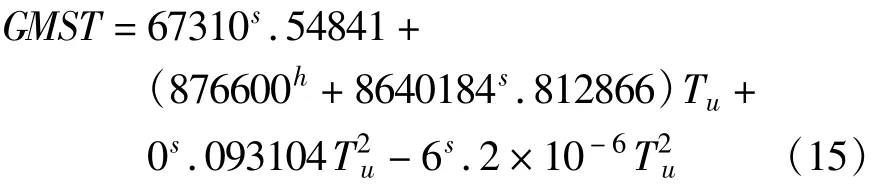
式中,Tu为从J2000.0历元起算至世界时UT1时刻的儒略世纪数:

式中,JD(UT1)为以UT1起算的儒略日,是一种不涉及年、月等概念的长期连续的记日法,其起算点为公元前4713年1月1日世界时12点。
4.1.7 准地固坐标系(ET)转地固坐标系(CTS)
准地固坐标系(ET)与地固坐标系(CTS)的差异为极移,转换矩阵D为

式中,xp、yp为极移两分量,可由IERS网站或GPS的L2C和L5导航电文中获取。在实际计算中,由于极移量很小(远低于观测资料对模型的要求),可以忽略,或用常值xp=yp=0″.4计算。
4.1.8 地固坐标系(CTS)转地平系(GD)
地心固联坐标系(CTS)与惯导地平坐标系(GD)间的差异是由地理位置和垂线偏差引起的,两坐标系间的转换关系式为

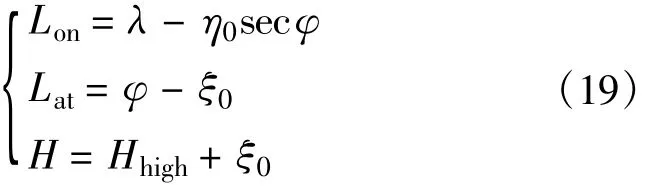
式中,λ、φ为测站天文经度与纬度;η0、ξ0为测站垂线偏差,反映了测站天文坐标系与大地坐标系间的偏差,其中η0为垂线偏差在卯酉圈上的分量,ξ0为测站的高程异常。
测站天文坐标λ、φ、Hhigh与地心大地坐标Lon、Lat、H(大地经度、纬度和高程)间的换算关系为
4.1.9 计算星敏感器光轴在以船载雷达三轴中心为原点的坐标系中的指向
由上述分析可知,星敏感器光轴在J2000.0坐标系中指向上单位矢量的端点,转至惯导地平系中的直角坐标(Xcgd,Ycgd,Zcgd)GD可由下式计算:
则星敏感器B光轴在以船载无线电测量设备三轴中心为原点的坐标系中的指向(Acgd、Ecgd)为

(Acgd、Ecgd)即可作为检验雷达角度测量精度检验的比较标准。
4.2 大气折射误差(蒙气差)修正
蒙气差同时受大气温度、大气湿度、大气压力、大气湍流以及观测仰角等诸多因素的影响,由于大气湿度、大气湍流对蒙气差的影响相对于其他因素要小得多[7],所以,目前我国模型中只考虑了观测仰角、大气温度以及大气压力等3种影响因素。蒙气差随仰角的增大而减小,蒙气差变化率随仰角的增加逐渐减小;蒙气差随大气温度的增高而减少,蒙气差变化率随气温的增加逐渐减小;蒙气差随大气压力的增大而增加,其变化率呈线性[8]。
4.3 轴系误差修正
轴系误差修正包括星敏感器光轴与雷达电轴间的不平行度修正、星敏感器光轴与雷达机械轴间的不平行度修正。
4.3.1 星敏感器光轴与雷达电轴间的不平行度修正
一般可分为两种情况:(1)雷达跟踪空间目标的同时,星敏感器视场中不仅能可见背景恒星,而且还能可见空间目标。此时应将空间目标在星敏感器中的方位脱靶量ΔA和俯仰脱靶量ΔE在(Acgd、Ecgd)中予以修正。修正公式如下:

(AZ、EZ)即为目标的真值用于作为精度检验的比较标准。
(2)雷达跟踪空间目标的同时,星敏感器视场中仅能可见背景恒星。此时应将事前测定的雷达电轴与星敏感器光轴间的不平行度(光电偏差)ΔAD和ΔED在(Acgd、Ecgd)中予以修正,修正公式同式(22)。
情况1与情况2的差别在于得到(Acgd、Ecgd)后的修正量不同,由于ΔA、ΔE或ΔAD、ΔED与雷达工作频点、雷达工作状况等因素有关,显然情况1的修正精度要略高于情况2。
4.3.2 星敏感器光轴与雷达机械轴间的不平行度修正
星敏感器光轴与雷达机械轴间的不平行度相当于光机偏差,数据处理时应予以修正。可采用星敏感器光轴瞄方位标的方法进行标定,也可先标出星敏感器光轴与标校望远镜光轴间的不平行度,再通过标校望远镜的光机偏差进行折算,具体标定方法同测量船传统坞内标校方法。
5 外场试验结果
5.1 试验结果
利用研制的星敏感器对某船载雷达进行了精度检验,结果如表1所示。表中,序号1栏为基于恒星观测的雷达精度检验结果,序号2栏为利用精轨卫星得到的结果。
表1 雷达精度检验结果Table 1 Accuracy test results of radar
5.2 基本结论
外场试验结果表明,与利用精轨卫星得到的结果相比,基于恒星观测的雷达精度检验残差均在0.3′之内,检验结果均与雷达设计指标基本吻合。
6 结束语
与传统的采用飞机校飞或跟踪已知其精轨的目标的方法相比,采用星敏感器观测恒星的数据作为雷达精度检验的比对标准具有精度高、经济性好等优点,可以实现雷达精度检验的常态化,对于提高雷达的性能和精度具有非常重要的价值。由于星敏感器的地面应用尚处于起步阶段,受研制水平限制,目前仅能对雷达精度进行检验,要实现对光学设备的检验还需进一步提高星敏感器的测角精度,研究影响测量精度的因素,如在动态条件下的星点提取和星图识别技术等,可以预见,星敏感器在地面的应用将会越来越深入和广泛。
[1]Roelof W H,VAN Bezooijen.SIRTF autonomous star tracker[C]//Proceedings of 2003 SPIE.Santa Clara,California,USA:IEEE,2003:108-121.
[2]孙高飞,张国玉,郑茹,等.星敏感器标定方法的研究现状与发展趋势[J].长春理工大学学报(自然科学版),2010,33(4):8-14. SUN Gao-fei,ZHANG Guo-yu,ZHENG Ru,et al.Star Sensor Calibration Research and Development[J].Journal of Changchun University of Science and Technology(Natural Science Edition),2010,33(4):8-14.(in Chinese)
[3]刘垒,张路,郑辛,等.星敏感器技术研究现状及发展趋势[J].红外与激光工程,2007,36(z2):529-533. LIU Lei,ZHANG Lu,ZHENG Xin,et al.Current Situation and Development Ttrends of Star Sensor Technology[J].Infrared and Laser Engineering,2007,36(z2):529-533.(in Chinese)
[4]冯国杰,王晓东.一种用于星敏感器的星点提取方法[J].测控技术,2010,29(10):13-15. FENG Guo-jie,WANG Xiao-dong.A Method of Star Extraction Using on Star Sensors[J].Measurement&Control Technology,2010,29(10):13-15.(in Chinese)
[5]Eisenman A R,Liebe C C,Jφrgensen J L.Astronomical Performance of the Engineering Modelφrsted Advanced Stellar Compass[C]//Proceedings of 1996 SPIE.Denver,Colorado:IEEE,1996:252-262.
[6]Michaels D,James S.New Ball Aerospace star tracker achieves high tracking accuracy for a moving star field[C]//Proceedings of 2004 SPIE.Bellingham:IEEE,2004:43-52.
[7]翁宁泉,曾宗泳,龚知本.卫星目标光学测量大气折射修正[J].量子电子学报,2011,18(6):560-565. WENG Ning-quan,ZENG Zong-yong,GONG Zhi-ben.The Refraction Correction of Optical Measurement to the Satellit[J].Chinese Journal of Quantum Electronics,2011,18(6):560-565.(in Chinese)
[8]茅永兴,张同双,朱伟康,等.船载星敏感器测星数据蒙气差实时修正方法[J].飞行器测控学报,2012,31(3):50-53. MAO Yong-xing,ZHANG Tong-shuang,ZHU Wei-kang,et al.A Real-Time Atomsheric Refraction Correction Method for Measurement Data of Ship-Borne Star Sensors[J].Journal of Spacecraft TT&C Technology,2012,31(3):50-53.(in Chinese)
ZHONG De-an was born in Jiangyin,Jiangsu Province,in 1964.He received the M.S.degree in 1990.He is now a senior engineer of professor. His research concerns calibration techniques for TT&C ship.
Email:Zda1014@126.com
张同双(1968—),男,江苏淮阴人,2006年获硕士学位,现为高级工程师,主要研究方向为船姿船位测量、标校、校飞;
ZHANG Tong-shuang was born in Huaiyin,Jiangsu Province,in 1968.He received the M.S.degree in 2006.He is now a senior engineer.His research concerns attitude and postion determination,calibration flight test for TT&C ship.
冯鸿奎(1971—),男,江苏泰州人,1994年获学士学位,现为高级工程师,主要研究方向为惯性导航技术;
FENG Hong-kui was born in Taizhou,Jiangsu Province,in 1971.He received the B.S.degree in 1994.He is now a senior engineer.His research concerns inertial navigation technology.
茅永兴(1968—),男,江苏南通人,2005年获硕士学位,现为研究员,主要研究方向航天测控技术。
MAO Yong-xing was born in Nantong,Jiangsu Province,in 1968.He received the M.S.degree in 2005.He is now a senior engineer of professor.His research concerns aerospace TT&C technology.
Accuracy Test Method for Ship-borne Radar Based on Star Sensing
ZHONG De-an1,2,ZHANG Tong-shuang1,2,FENG Hong-kui1,MAO Yong-xing1,2
(1.China Satellite Maritime Tracking and Control Department,Jiangyin 214431,China;2.Joint Laboratory of Ocean-based Flight Vehicle Measurement and Control,Jiangyin 214431,China)
Traditional method of ship-borne radar accuracy tests by airplane tracking object can not practice frequently,so a new method based on star sensing is presented,in which star sensing data obtained by means of star sensor is taken as comparing data.In this paper the transform formula of star sensor′s optical axis pointing from the J2000.0 inertial coordinate system to the horizontal coordinate system is deduced.Also,the main factors influencing test accuracy are analyzed.According to the tracked object visible or invisible in star sensor,two different methods of photoelectric deviation correction are advanced.The field tests show that the residual obtained by the method is less than 0.3'compared with tests by satellite,which meets the needs of the tests. With this method,not only accuracy tests of ship-borne radar can practice frequently but also the validity and real-time property can be improved.
ship-borne radar;accuracy test;star sensing;photoelectric deviation;star sensor
date:2013-06-28;Revised date:2013-08-20
❋❋通讯作者:Zda1014@126.comCorresponding author:Zda1014@126.com
TN95;V556
A
1001-893X(2013)09-1229-05

钟德安(1964—),男,江苏江阴人,1990年获硕士学位,现为研究员,主要研究方向为测量船标校技术;
10.3969/j.issn.1001-893x.2013.09.021
2013-06-28;
2013-08-20
