有人/无人机协同作战❋
2013-06-27王焱
王焱❋❋
(海军装备部航空订货部,北京100841)
有人/无人机协同作战❋
王焱❋❋
(海军装备部航空订货部,北京100841)
介绍了国外有人/无人机协同作战的发展概况,给出了有人/无人机之间协同作战的几种可能模式,并分析了有人机实现无人机地面控制站功能的可行性。相关结论对该领域技术人员开展有人/无人机协同作战研究具有重要意义。
无人机;有人机;协同作战;地面站;控制功能
1 引言
无人作战飞机作为下一代战机的发展方向,具有高费效比、攻防兼备的特点[1],是空军重点发展的无人作战武器装备。但由于无人作战飞机的智能系统还不能替代人的思维与判断,因此采用有人/无人战机协同作战方式更有利于执行防空压制与战略纵深攻击等典型对地攻击任务及对空目标攻击任务[2-5]。
当前,无人机系统的正常运行依赖于与地面控制站之间的可靠、高效通信,它们均由地面站控制完成,但这种传统的模式无法在无人机与各个作战平台之间建立起快速的信息传递、精确的攻击及较短的决策周期,同时,指挥控制范围受到地域地形限制,且信号情报极易被侦收和干扰,因此,很大程度上限制了无人机系统的作战效能发挥[6]。
为了克服上述无人机的不足,在未来战争中,有人机与无人机及其他无人支援飞机联合编队作战将成为一种全新的并且是主要的作战模式。在联合作战中,无人机直接接受有人机平台的指挥控制,实施联合目标确定、协同指挥控制、一体化作战、快速打击决策及动态评估,从而实现“传感器-控制器-射手”的一体化作战模式[7]。
本文通过梳理国外有人/无人机协同作战概况,探讨了相应协同作战的几种可能模式,并分析了有人机实现无人机地面控制站功能的可行性。
2 国外有人/无人机协同作战发展概况
目前,美英等无人机发展水平较高的国家均在加紧有人/无人机协同作战应用研究,探索无人机与各类作战平台的集成方法,主要包括以下几个项目。
2.1 机载有人/无人系统技术项目(AMUST)
AMUST于1996年启动,主要目的是开发和验证有人/无人机编队协同作战所需的软件、组件和程序,提高有人/无人机的综合作战效率。
“AMUST6.2 effort”于1999年底启动,主要进行有人无人系统编队概念的功能需求定义、关键技术分析和试验验证。根据试验评估结果,机载人员生存性增加25%以上,武器系统杀伤力增加50%以上。
几乎与此同时,AMUST办公室与波音公司和TRW一起,使用AH-64D“阿帕奇”长弓直升机和“猎人”无人机朝着降低风险的目标努力,该项目称为“AMUST-Baseline”,是“AMUST6.2 effort”与“AMUST-D 6.3 effort”之间的过渡阶段。该项目实现了无人机侦察视频图像在直升机多个目标显示器上显示,并且直升机机组人员在必要时可操作控制无人机和传感器包。
“AMUST-Baseline”研究的成功为接下来于2000年启动的“AMUST-D 6.3 effort”项目奠定了良好基础。后者将重点放在了指挥控制飞机、直升机与无人机之间的互连互通上(主要使用TCDL实现),并开发和综合各种直接视频/数据接收、直接载荷控制以及直接飞行控制等相关有人/无人飞机编队技术。
2.2 波音公司有人/无人战机协同飞行能力研究
2004年7月,波音公司首次验证有人战机(例如F-15E)与无人战机协同飞行的能力。在验证试验中,除使用了一架F-15E“攻击鹰”战斗机之外,还采用了基于联合无人空战系统(J-UCAS)的T-33飞行试验台,并在其上安装了无人机的航电软件。此次验证试验的关键设施之一是波音公司“鬼怪”工程队开发的开放式控制平台(OCP)转换软件设施,它是一项开发无人机控制能力的重要设施,能快速将新的控制设计软件和工具综合到无人机上,从而使无人机满足未来任务的要求。
2.3 英国QinetiQ公司有人机控制无人机试验
1999年,QinetiQ公司开始为英国政府开展无人机执行攻击任务的系统需求研究,分析无人机在纵深攻击中的自主控制需求,重点是考察单座战斗机对多架无人机的控制和协同可行性。根据试验结果,单座战斗机操作无人机时,若无人机的智能化和自主控制水平低,则操作者的工作量显著增加,几乎无法实现对无人机的飞行或载荷控制操作;当无人机的智能化水平较高时,单座战斗机也可对其进行4级的互操作控制。
2006年10月底,作为英国国防部某研发项目的部分内容,QinetiQ公司以BAC1-11飞机模拟无人机,成功验证了新型的控制和管理无人机方法,实现了战斗机控制和自主组织多架无人机。
2007年4月,QinetiQ公司和英国国防部成功进行了1架“狂风”综合航空电子研究样机(TIARA)作为指挥控制飞机与模拟无人机的BAC1-11飞机的编队飞行试验,实现有人作战飞机中的一位飞行员直接控制4架无人机。
2.4 其他项目
除了以上3个项目之外,其他一些具有代表性的无人机项目/计划如表1所示。
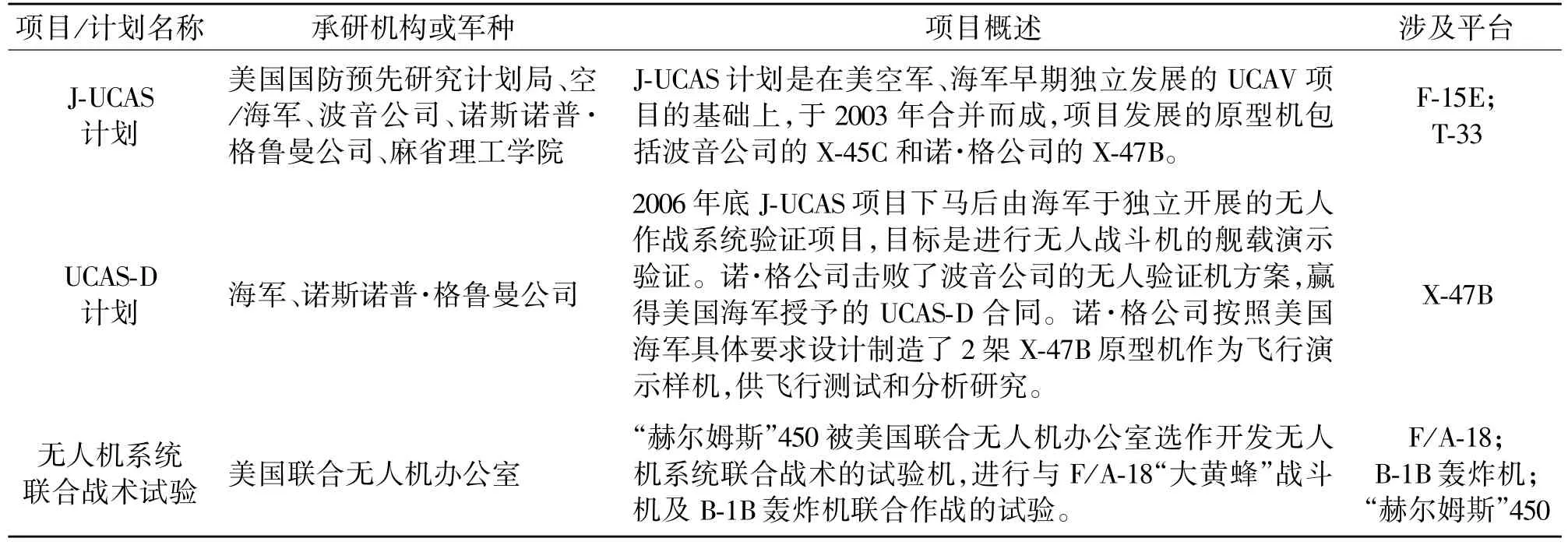
表1 外军无人机项目Table The UAV programs of foreign forces
3 有人/无人机协同作战模式
协同作战主要指有人/无人机之间的联合战术行动,在空-空、空-地以及空海的不同作战环境下,有人/无人机之间的协同模式可划分为以下3种:态势感知、协同攻击和协同防御[4-5,8],以下分别予以介绍。
3.1 态势感知
利用有人/无人机的多个资源跟踪同一目标,可有效提高跟踪质量,且可实时显示目标未被跟踪(如未分配)或者不能跟踪(如未在自己的视场内)的状态,从而极大增强有人/无人战斗机编队的状态感知能力。同时,如图1所示,利用互联的空中C2平台、战斗机、无人机(共享角度跟踪数据)及多种技术,可有效地对无源辐射或有源辐射目标实施协同定位。

图1 协同态势感知Fig.1 Cooperative situation awareness
通过协同方式还可改善其他活动,包括地形跟随/地形回避、在恶劣环境条件下加油或飞行突防编队和进入机动飞行。
3.2 协同攻击
3.2.1 对空目标攻击
如图2所示,由一架有人机带领双无人作战飞机编队执行对空目标攻击任务,无人机突前并保持雷达静默。当无人机高速隐蔽接敌到其武器作用距离范围时,有人机开启雷达对目标进行探测,将目标信息通过协同网络实时传输给无人机,并启动无人机武器发射指令,并对飞行中的武器制导,实现对敌空中目标的攻击。
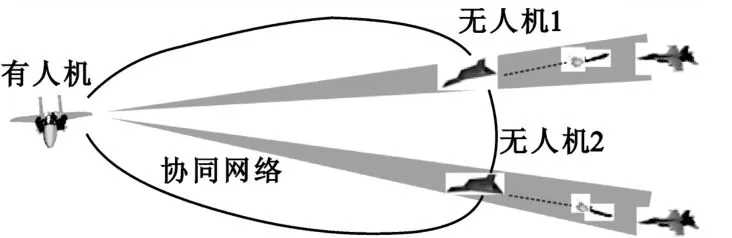
图2 对空目标攻击Fig.2 Attacks on targets in space
3.2.2 分布式多任务协同攻击
如图3所示,有人机指挥多架无人机编队执行对地攻击作战任务,实现分布式的协同攻击作战。每架无人作战飞机各自配置ESM、SAR、光电/红外等不同的传感器,以及不同类型的对地攻击武器,以降低单架无人作战飞机的成本。各无人机分工合作、密切协同,在有人机指挥控制下作为整体执行目标探测、识别、攻击、评估等多种任务。

图3 分布式多任务协同攻击Fig.3 Distributed multitask cooperative attack
3.2.3 跨平台制导
如图4所示,无人作战飞机与有人作战飞机编队,有人作战飞机可以将无人作战飞机作为扩展的武器舱,控制其武器的发射。在导弹打击过程中,被攻击地面目标因位置移动或实施电子干扰,导致导弹初始目标数据出现误差,且有人作战飞机处于敌方地空导弹威胁之外,则可由有人作战飞机接管对导弹进行中段制导,提供不断的目标更新数据,提高打击效能。
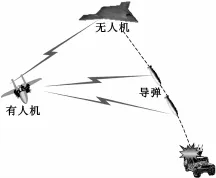
图4 跨平台制导Fig.4 Cross platform guidance
3.3 协同防御
有人/无人机协同防御的最大优势在于提高了威胁告警能力。多机编队进行机载告警设备组网,对来袭导弹等威胁目标协同告警,以增强对威胁目标来袭方向、威胁程度的告警准确性。传统的单平台装备的干扰设备数量、功能有限,难以同时在时域、频域、空域,以及信号波形等方面对敌威胁、雷达进行持续稳定的有效干扰。而有人/无人机协同多机编队进行机载有源和无源电子干扰设备组网,可以实现协同防御,如图5所示。在实施有源电子干扰时,编队各成员之间可进行干扰区域、干扰目标、干扰时机、干扰样式、干扰参数、干扰功率等协同。在实施无源电子干扰时,编队各成员之间进行干扰物类型、干扰物投放时机、干扰物投放数量、干扰物投放时间间隔等协同。

图5 协同干扰防御Fig.5 Cooperative jamming to defense
4 有人机实现无人机地面控制站功能可行性分析
由于无人机是“无人驾驶”,精心设计其控制系统就显得尤为重要。它的控制系统通常分为空中和地面两个部分,两者之间可以通过可靠的通信数据链路实现互通,以高效准确地完成各种指令任务[9]。
地面控制站是无人机系统的作战指挥中心。地面控制站一般由任务规划设备、控制及显示设备、图像及遥控设备、计算机及信号处理设备、通信数据终端、通信设备、环境控制等组成。地面控制站主要负责:控制无人机的发射、飞行与回收;接收和处理来自无人机有效载荷的数据;接收和处理来自其他部队单位的任务分配和请求;控制其传感器等有效载荷的运行;完成无人机的任务及航路规划;完成无人机的飞行控制以及提供无人机系统与外界的通信接口等功能。
除了传统的地面控制站之外,在有人/无人机协同模式下,还可考虑利用有人平台实现无人机地面控制站的功能,这一功能实现依赖于通信数据链的发展和软件架构的合理设计。
4.1 通信数据链技术的发展
随着通信数据链技术的不断发展,新型数据链如战术通用数据链(TCDL)、多平台通用数据链(MPCDL)、TTNT数据链的出现,在有人机平台上加装和应用这些数据链将成为必然的趋势。TCDL可承担有人机与地面、海上和空中节点之间的高速数据通信任务需求。例如,装备TCDL数据链的有人机可以实现对无人机实时图像视频信息的接收,并通过TCDL数据链或其他数据链将信息进一步分发出去。同时,TCDL数据链将是未来有人机与无人机侦察系统进行遥测/遥控和实时数据协同的主要手段。图6给出了通过TCDL进行有人/无人机协同的框架结构。

图6 通过TCDL进行有人无人协同控制Fig.6 Manned cooperative control by TCDL
TTNT数据链可在有人机与无人机平台之间提供高性能、互操作的数据通信,产生并共享一幅公共的、合成的、实时的战场态势图像,实现对时间敏感目标的快速瞄准定位和精确指挥打击。它具有容量大、时延低等特点,将成为未来有人机与无人机进行时敏信息交付的主要手段之一。
可见,通信数据链技术的发展,为实现有人/无人机协同控制奠定了良好基础。
为扩充信息处理能力提供了基础,可通过对有人平台进行适当改进,实现无人机地面控制站功能向有人机平台的移植,从而实现无人机地面控制站相应能力。
无人机地面控制站功能向有人机平台的移植不是简单的拷贝与安装,主要是开发相应的软硬件功能模块与有人机平台进行统一,并结合数据链技术,实现有人/无人协同控制能力。美军Apache直升机VUIT-II主要用于为Apache直升机提供有人/无人编队能力,以改进战场情报、监视、侦察及目标获取能力的数据链系统,由全向杆状设备(TOMMA)和EFAB视频接收设备(RCVR)等组成。
4.2 基于CORBA的有人机控制无人机的软件架构
根据北约STANAG 4586标准,有人机对无人机的协同控制能力定义为5级,级别越高,对无人机的控制能力越强,如表2所示。目前,有人/无人机的协同控制主要涉及1~4级。

表2 有人机对无人机的协同控制能力级别Table 2 Cooperative control capability level of manned-to-unmanned
如4.1节所述,随着通信数据链技术的发展,有人机和无人机之间可通过各种战术数据链或宽带数据链组成数据传输网络,从而为实现有人机控制无人机提供硬件支持。相应地,其软件系统必须满足以下目标:
(1)重构性:易于添加和删除不同功能(软件);
(2)广泛性:支持不同类型无人机;
(3)扩展性:易于添加新的无人机类型,并适用于在不同处理器上操作;
(4)实时性:与无人机(准)实时通信。
由此,提出一种基于CORBA的有人机控制无人机的软件架构,如图7所示,通过CORBA中间件技术,有人机通过各种通信链路接入不同种类的无人机,实现其控制功能。同时,这种开放体系和分层架构支持不同类型的硬件平台和软件操作系统,为有人/无人机协同作战的空中移动C2平台提供了相应的网络解决方案。

图7 基于CORBA的有人机控制无人机的软件架构Fig.7 Software architecture manned aerial control unmanned aerial based on CORBA

图8 基于CORBA软件架构的“无人机管理平台”结构Fig.8 Structure of UAV management platform based on CORBA software architecture
在这种软件架构中,“无人机管理平台”是一个重要组成部分。如图8所示,它使用面向对象的方法,这样更容易集成不同类型的无人机;同时,其中的“UV-控制构件”是连接指控平台和特定无人机之间的桥梁。
5 结论
无人作战飞机是20世纪90年代中期出现的一种新的武器系统概念,它凭借其独特优势正在成为空基武器平台的重要形式,并将逐步发展壮大成为主要的航空武器。发展无人战斗机的最终目的是在人不干预或极少干预的条件下,自主完成作战任务。因此,可以认为有人/无人机协同作战只是在现阶段无人机的智能化程度不高的条件下采用的一种作战方式。尽管如此,有人/无人机协同这种全新的组合必然会对未来作战模式产生重大影响,其在作战样式、指挥、组织、训练样式等都将会不同,因此,开展有人/无人机协同作战技术研究具有十分重要的意义。
在发展各类无人系统、完善其装备体系的同时,如何有效地实现无人机与有人作战飞机之间的协同应用,已成为美军等外军关注的重点。美军强调无人机编队作战,发展有人飞机控制无人机进行协同探测、协同防御、协同攻击的作战样式,提高作战能力。此外,以TCDL和TTNT等为代表的通信数据链技术的发展和基于CORBA的有人机控制无人机的软件架构,为实现有人/无人机协同控制奠定了良好基础,并可进一步实现以有人/无人机协同作战为核心的高度互操作和网络化作战。这些理念和技术为该领域技术人员在有人/无人机协同作战研究方面提供了有益参考。
[1]Paul G F,Thomas J G.Introduction to UAV Systems[M]. 2nd ed.Columbia,Maryland:UAV Systems Inc.,1998.
[2]Jonathan H.Flight Demonstrations of Cooperative Control for UAV Teams[C]//Proceedings of 2004 AIAA 3rd Unmanned Unlimited Technical Conference.Chicago,Illinois:AIAA,2004:1-5.
[3]Chandler P R.Distributed Control for Multiple UAVs with Strongly Coupled[C]//Proceedings of 2003 AIAA Guidance,Navigation,and Control Conference and Exhibit. Austin,TX:AIAA,2003:1-6.
[4]马向玲,雷宇曜.有人/无人机协同作战关键技术[J].火力与指挥控制,2012,37(1):78-81. MA Xiang-ling,LEI Yu-yao.Research on the Key Technology of Cooperative Attack for Manned Vehicle/Unmanned Aerial Vehicle[J].Fire Control&Command Control,2012,37(1):78-81.(in Chinese)
[5]马向玲,雷宇曜,孙永芹,等.有人/无人机协同空地作战关键技术综述[J].电光与控制,2011,18(3):56-60. MA Xiang-ling,LEI Yu-yao,SUN Yong-qin,et al.Key Technologies for Cooperation of Manned/Unmanned Aerial Vehicles in Air-to-Ground Attacking[J].Electronics O ptics&Control,2011,18(3):56-60.(in Chinese)
[6]张安,曹璐,郭凤娟.无人作战飞机侦察/打击一体化自主控制关键技术探讨[J].电光与控制,2010,17(1):1-6. ZHANG An,CAO Lu,GUO Feng-juan.Survey of Key Technologies of Autonomous Control on Integration of Reconnaissance and Attack for UCAVs[J].Electronics Optics&Control,2010,17(1):1-6.(in Chinese)
[7]刘跃峰,张安.有人机/无人机编队协同任务分配方法[J].系统工程与电子技术,2010,32(3):584-587. LIU Yue-feng,ZHANG An.Cooperative task assignment method of manned/unmanned aerial vehicle formation[J]. System Engineering and Electronics,2010,32(3):584-587.(in Chinese)
[8]邵凝宁.数据链指挥下无人机群超机动对空对地攻击研究[D].南京:南京航空航天大学,2006. SHAO Ning-ning.Research on Air-to-air and Air-toground Super-maneuver Attack of UACVs Based on Tactical Digital Information Link[D].Nanjing:Nanjing University of Aeronautics and Astronautics,2006.(in Chinese)
[9]彭辉.有人机/无人机协同任务控制系统[J].航空学报,2008,29(S):135-141. PENG Hui.Cooperative Mission Control System for a Manned Vehicle and Unmanned Aerial Vehicle[J].Acta Aeronautica et Astronautica Sinica,2008,29(S):135-141.(in Chinese)
WANG Yan was born in Shenyang,Liaoning Province,in 1963.He is now a senior engineer.His research concerns avionics and science research management.
Email:wzl-job@aliyun.com
Cooperative Attack for Manned/Unmanned Aerial Vehicles
WANG Yan
(Aeronautic Equipment Order Office,Naval Equipment Department,Beijing 100841,China)
This paper introduces the development of cooperative attack for manned/unmanned aerial vehicles,presents future possible modes of the cooperative attack between aircraft and unmanned aerial vehicles(UAV),and analyzes the feasibility of realizing the ground control function of UAV by manned aerial vehicles.Relative conclusions are meaningful for technicians concerning this field to carry out research on cooperative attack for manned/unmanned aerial vehicles.
unmanned aerial vehicle;manned aerial vehicle;cooperative attack;ground station;control function
date:2013-08-02;Revised date:2013-09-02
❋❋通讯作者:wzl-job@aliyun.comCorresponding author:wzl-job@aliyun.com
V279
A
1001-893X(2013)09-1253-06

王焱(1963—),男,辽宁沈阳人,高级工程师,主要从事航空电子技术研究和航空科研管理工作。
10.3969/j.issn.1001-893x.2013.09.026
2013-08-02;
2013-09-02
