FM遥测解调自动极性纠反功能的改进设计❋
2013-06-27刘洋赵文华何晶邹春华王喜权
刘洋,赵文华,何晶,❋❋,邹春华,王喜权
(1.中国卫星海上测控部,江苏江阴214431;2.飞行器海上测量与控制联合实验室,江苏江阴214431)
FM遥测解调自动极性纠反功能的改进设计❋
刘洋1,2,赵文华1,2,何晶1,2,❋❋,邹春华1,王喜权1
(1.中国卫星海上测控部,江苏江阴214431;2.飞行器海上测量与控制联合实验室,江苏江阴214431)
针对FM遥测解调在高误码条件下出现的极性误反转问题,从传输信道不同的高低差变频方式会导致频谱反转进而导致解调极性反转出发,引出了自动极性纠反功能的设计背景。通过详述帧极性检测标识在搜索和校核、锁定两种不同状态下的判决逻辑,分析了原自动极性纠反功能的设计原理,结合模拟验证试验,揭示了原判决逻辑在帧极性检测标识第二次判1过程中不够严格,未考虑到高误码也可造成反码出现后帧极性检测标识被误判1的设计缺陷。将帧极性检测标识第二次判1逻辑改进为异或累加结果超过帧同步码组长的一半而非滑动相关峰值,解决了缺陷问题又兼顾了检测的快速性,通过改进后的验证试验证明了改进设计的正确性和有效性。
FM遥测解调;极性反转;帧极性检测标识;锁定容错
1 引言
在某测控的FM遥测检后位流数据中出现部分数据帧的时间码乱码现象,仔细比对原数据发现:时间码乱码完全是由于部分帧的整个极性发生了误反转所致。但FM遥测解调作为一项成熟的技术在以往的航天测控数据中从未发生过极性误反转现象,通过集中比较本数据与以往数据的不同发现,唯一的差别就是本数据的误码很高——误码率达到了10-2量级,因此需构建模拟验证试验以及从FM遥测解调的自动极性纠反设计原理两方面加以分析。
2 模拟验证试验
模拟验证试验进行如下:为了分析问题的方便,基带模拟源不模拟真实的动态数据,而是将遥测帧结构全部设成固定形式,如表1所示:子帧同步码设为3C6B(数据用十六进制表示,以下同),子帧遥测字全部设为固定值AA,副帧方式设为反码副帧。打开信道前端的低噪声放大器引入信道噪声,然后通过设置调制模块的输出电平使解调数据的误码率达到10-2量级。此时极性误反转现象复现出来:误反转发生在帧同步码出现反码(该数据的副帧同步方式为反码副帧)后的第二帧,如表1中的N+2帧所示,当该帧的帧同步码出现误码的个数大于帧同步锁定容错时,下一帧数据便会出现极性反转。此验证试验说明当前的遥测解调单元的自动极性纠反设计存在系统性缺陷,该缺陷在正常情况下不会暴露,必须在误码率超过10-2量级时才会出现。

表1 检后位流数据极性反转结果Table 1 Polarity reversal results of post demodulation bit-stream data
3 原自动极性纠反设计
对于FM遥测传输信道而言,箭载/弹载遥测发射机的上变频器和地面测站接收机的下变频器在变频方式上可能不同——既可采用高差方式(变频器的本振频率比遥测信号频率高)也可采用低差方式(变频器的本振频率比遥测信号频率低)。如图1所示,f0为FM遥测中频信号的中心频率,f1、f3分别为箭载/弹载遥测发射机的上变频器在低差和高差时的本振信号频率,f2为箭载/弹载遥测发射机发射的下行信号中心频率(为了说明问题方便,这里将变频方式都简化成固定本振的一次变频,实际变频器通常由二次变频的频综组成。同时FM遥测信号的频谱也画成不对称形式,实际的信号频谱是相对中心频率左右对称的连续谱)。由图可知,f2-f1=f3-f2=f0,以中频信号频带内任意一根谱线(频率为F)为例,若箭载/弹载遥测发射机采用低差方式进行上变频,则该谱线的频率F将被变频到F+f1,若地面测站接收机也采用低差方式进行下变频,则接收机输出的该谱线的频率为F+f1-f1=F,因此输出的遥测信号频谱一定是原信号的频谱,若地面测站接收机采用高差方式进行下变频,则接收机输出的该谱线的频率为f3-(F+f1)=f2+f0-(F+f1)=2f0-F,可见输出信号频谱是原信号频谱的反转形式,如图2所示。
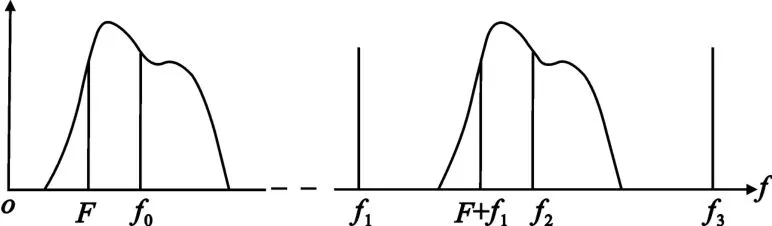
图1 箭载/弹载遥测发射机的上变频器低差变频方式下的频谱图Fig.1 Spectrum under the low difference mode in the up converting frequency mixer of the rocket/missile telemetry

图2 地面测站下变频器高差变频方式下的频谱图Fig.2 Spectrum under the high difference mode in the down converting frequency mixer of the ground surveying station
频谱的反转必然导致解调过程中码元判决的极性反转——0码元判成1码元,1码元判成0码元。原因是:FM体制是用频率相对载波频率(即中心频率)的正偏和负偏来表示0码元和1码元[1],频谱反转就意味着代表码元极性的正负频偏发生了反转。因此可以得出如下结论:只要FM遥测传输信道上、下变频器采取相反的变频方式,必然导致解调的极性发生反转,使得数据不能正确还原,因此地面测站的遥测解调单元必须增加抗数据反转的自动极性纠反功能。
该功能的设计思路是通过在帧同步过程中连续判帧同步码的极性来实现的:首先设置一位帧同步极性检测标识,从而对每帧数据的帧同步极性检测判决结果进行标记,标记的方式与帧同步的状态有关:在搜索状态,用滑动相关运算寻找帧同步码,若出现正相关峰值,判断已检测到帧同步码,将标识置0;若滑动相关运算出现负相关峰值,也判断检测到了帧同步码并且该码已反转,即检测到了帧同步码的反码,将标识置1。在校核和锁定状态,由于只是对搜索状态检测到的帧同步码字能否保持作出判断[2],因此对帧同步码的检测方式和极性标识方式与搜索状态不同:用本地设置的帧同步码组与数据帧中的帧同步码字(该码字是在搜索状态下检测到的,处于每帧数据中的固定位置上)进行逐位异或运算,并将每位异或结果进行累加。当帧同步码出现误码的个数即异或累加结果小于或等于校核或锁定容错(通常将搜索、校核、锁定容错设为相同值)时,将标识置0;当帧同步码误码个数大于校核或锁定容错时,还要根据上一帧的标识值来决定当前帧的标识,当上一帧的标识为0时,并且异或累加结果等于滑动相关峰值时,当前帧标识才置1,否则都置0;而当上一帧的标识为1时,当前帧标识就保持上一帧的标识值。若连续3帧中有2帧的标识为1,就判定整个数据的极性已发生了反转,因此从下一帧开始要先进行求反运算(数据帧逐字与FF进行异或),同时将标识置0。

表2 遥测解调单元自动极性纠反功能示意Table 2 Automatic polarity correction function of telemetry demodulation unit
这样的设计还兼顾了反码副帧方式——根据上述判决原则,在三态下帧同步位置出现反码时标识都置1,但由于反码不会在连续3帧中出现两次,因此不满足极性反转的判定条件,不会进行数据极性反转。
4 改进设计
如上所述,解调单元自动极性纠反功能在正常情况下是不会出现误反转问题的。仔细比对遥测解调参数和问题出现的部位发现,误反转时要有3个特殊条件必须同时满足:一是误码刚好出现在反码副帧的下一子帧同步码上(正常情况此发生概率很小,因此一定是高误码率情况);二是较小的锁定容错(帧同步码误码个数超过锁定容错);三是较大的锁定帧数(在帧同步码误码较大时帧同步还保持)。如表1所示,反码副帧后的下一帧——第N+2帧同步码为3C68,帧同步码误码个数为2,大于锁定容错1,同时第N+1帧标识为1(第N+1帧为正常的反码副帧状态),根据原判决逻辑,第N+2帧标识错误地保持了第N+1帧标识值1,因此从第N+3帧开始数据极性发生了误反转,但如果后面数据的帧同步码能连续保持正常(连续两次保持反码值C394),根据原判决逻辑,数据极性还会再次发生反转,重新恢复正确极性(如N+3~N+6帧所示),这就是为什么原位流数据中只有部分数据帧出现时码乱码,而未出现大片连续数据帧时码乱码的现象。从以上分析可见,原判决逻辑的问题出在校核与锁定状态的判断:当帧同步码出现误码的个数大于校核或锁定容错并且上一帧的标识为1时,将标识保持为1(这样做是为了保证在正常情况下解调单元能够快速准确地完成极性纠反,从而更多地获取数据,事实也证明遥测数据误码率在10-4以下的正常情况时,从未出现极性误反转的情况)。为了保证试验数据在高误码率时解调单元也能正确进行极性纠反,可按如下方法改进:满足上述条件时标识不再保持1,而是同样根据帧同步的异或累加结果来决定当前帧的标识,但为了兼顾纠反的快速性,这里不必让异或累加结果等于相关峰值,而是以帧同步码码长的一半为判决标准(以表2为例,相关检测峰值为14~16,而帧同步码码长一半为8),当异或累加结果大于帧同步码码长的一半时,当前帧的标识置1,否则均置0。这样的判决设置是基于以下考虑:如果是由于数据的误码太高而导致了异或累加结果大于帧同步码码长的一半,数据极性仍会误反转,但这样高的误码(误码在数据帧中的任意位置出现概率都是相同的[3],若一帧数据中帧同步码的一半都是误码,说明数据的误码已相当高,基本无法从数据中获取有效信息)说明该数据已不可用,极性是否误反转已不重要。
5 改进后的验证试验
按照上述改进方法对基带FPGA代码修改后进行对比验证试验:修改基带调制模拟源加载数据,令模拟数据中某个反码副帧后的一个帧同步码超过锁定容错(应为3C6B,改为3C68),遥测解调单元进行上述模拟源数据模飞和闭环自检,启动位流数据记录,记录后的位流数据回放并转储成PC能识别的二进制文件,如图3(b)所示(图3(a)为代码修改前记录的位流数据回放并转储的二进制文件)。从图3可见代码修改前数据极性发生了反转,而修改后未发生反转,数据极性保持正确。

图3 代码修改前后位流转储数据极性反转比对结果Fig.3 Data comparison result before and after code changes
基带进行闭环自检:设置模拟源模块输出信号的载噪比低于解调门限3 dB(载噪比在门限时对应误码率小于1×10-4),模拟误码率达到10-2数量级时的状态,启动位流数据记录并回放转储成PC能识别的二进制文件,打开该文件观察是否出现时码乱码,如图4(b)所示(图4(a)为代码修改前记录的位流数据回放并转储的二进制文件)。从图4可见代码修改前时码出现乱码,而修改后在数据文件相同部位未出现时码乱码。

图4 代码修改前后位流转储数据时码比对结果Fig.4 Time-code comparison result before and after code changes
6 结束语
高误码条件下的遥测数据有时比正常情况更加重要,因为高误码一般发生在飞行异常等特殊情况,此时如何从高误码的数据中获取有效信息就显得尤为重要。本文针对FM遥测解调自动极性纠反功能在高误码情况的设计缺陷,提出的改进方法能够彻底解决数据极性误反转问题,从而增强解调设备在高误码条件下的数据识别能力,但是对于极性反转问题,还应考虑基带的位流回放模块的功能设计,因为位流数据的回放存在一个二次解调的问题,而回放本身就是要确保已记录在存储器上的数据能原封不动地被还原出来,因此对于基带的位流回放模块不应再有自动极性纠反功能。
[1]唐歌实.深空测控无线电测量技术[M].北京:国防工业出版社,2012. TANG Ge-shi.Radiometric Measuring Techniques for Deep Space Navigation[M].Beijing:National Defense Industry Press,2012.(in Chinese)
[2]孔冬.高速PCM/FM遥测解调技术研究[D].成都:电子科技大学,2012. KONG Dong.Study on High-speed PCM/FM Telemetry Demodulation Technology[D].Chengdu:University of Eletronic Science and Technology of China,2012.(in Chinese)
[3]刘嘉兴.飞行器测控通信工程[M].北京:国防工业出版社,2010. LIU Jia-xing.Spacecraft TT&C and Communication Engineering[M].Beijing:National Defense Industry Press,2012.(in Chinese)
LIU Yang was born in Changchun,Jilin Province,in 1973.He received the M.S.degree in 2005.He is now a senior engineer.His research concerns space telemetry and digital transmitting.
赵文华(1965—),男,江苏江阴人,2004年获电子信息工程硕士学位,现为高级工程师,主要从事航天测控总体技术的研究;
ZHAO Wen-hua was born in Jiangyin,Jiangsu Province,in 1965.He received the M.S.degree in 2004.He is now a senior engineer.His research concerns aerospace TT&C general technology.
何晶(1975—),女,吉林省吉林市人,2006年获天体测量与天体力学专业硕士学位,现为高级工程师,主要从事航天测控数据处理技术的研究;
HE Jing was born in Jilin,Jilin Province,in 1975.She received the M.S.degree in 2006.She is now a senior engineer.Her research concerns orbit determination and data precision analysis.
Email:jialhhj@163.com
邹春华(1972—),男,浙江诸暨人,高级工程师,主要从事航天测控总体技术的研究;
ZOU Chun-hua was born in Zhuji,Zhejiang Province,in 1972. He is now a senior engineer.His research concerns aerospace TT&C general technology.
王喜权(1975—),男,湖北武汉人,工程师,主要从事航天无线电遥测数传技术的研究。
WANG Xi-quan was born in Wuhan,Hubei Province,in 1975.He is now an engineer.His research concerns space telemetry and digital transmitting technology.
An Improved Design for Auto Polarity Revising of FM Telemetry Demodulation
LIU Yang1,2,ZHAO Wen-hua1,2,HE Jing1,2,ZOU Chun-hua1,WANG Xi-quan1
(1.China Satellite Maritime Tracking and Control Department,Jiangyin 214431,China;2.Joint Laboratory of Ocean-based Flight Vehicle Measurement and Control,Jiangyin 214431,China)
This paper proposes the background of automatic polarity correction function of telemetry demodulation unit from the false polarity revising by high error code under the different channel frequency conversion mode. Then it analyzes the principle of automatic polarity correction design by two kinds of judge logic of identifying the frame polarity under the searching state and the chechout/lock state.With the evidence of the simulating test the bug has been found that high error code can result in error on the second identifying wheather the frame polarity equals 1 after the frame polarity synchronization reverse code emerges.Finally,the bug is removed by adopting the modification of identifying the frame polarity as 1 just by whether difference probability accumulation exceeds half length of frame synchronization code.By such modification it not only removes the bug but also assures the identifying′s speediness.As a result of the test after the modification,the new design has been approved to be correct and effective.
FM telemetry demodulation;polarity reversion;frame synchronization identifying code;locked error tolerance
date:2013-04-11;Revised date:2013-07-17
❋❋通讯作者:jialhhj@163.comCorresponding author:jialhhj@163.com
TN76
A
1001-893X(2013)09-1234-04

刘洋(1973—),男,吉林长春人,2005年获硕士学位,现为高级工程师,主要从事航天无线电遥测数传技术的研究;
10.3969/j.issn.1001-893x.2013.09.022
2013-04-11;
2013-07-17
