应用于复杂电磁环境下的一种新型船艇导航系统❋
2013-06-27张长辉魏旭冠
张长辉❋❋,魏旭冠
(解放军镇江船艇学院,江苏镇江212003)
应用于复杂电磁环境下的一种新型船艇导航系统❋
张长辉❋❋,魏旭冠
(解放军镇江船艇学院,江苏镇江212003)
复杂的电磁环境是未来信息化战场最突出的特征,这样的环境将会干扰现有依靠无线电波进行工作的导航系统。为有效解决船艇在复杂电磁环境下的导航问题,提出了一种以陆标定位为基础的新型船艇导航系统。系统通过高清度摄像机和磁航向传感器获取观测物标数据,经过计算机解算,将位置信息显示到电子海图上。海上试验情况表明,与传统的陆标定位相比,本系统在定位时间、定位精度等方面具有明显的优越性,完全满足军事航海的要求,具有良好的军事效益。
军事航海;复杂电磁环境;船艇导航系统;陆标定位;高清度摄像机;磁航向传感器
1 引言
复杂电磁战场环境是信息化战争的产物。在信息化战争条件下,战场感知、指挥控制手段的自动化、信息化程度越高,越有利于对战场局势的把握,越有利于指挥员做出及时准确的判断决策,为赢得战争的胜利奠定基础[1]。导航定位系统作为船艇战场感知的重要内容,是保证船艇航渡安全、及时圆满完成战斗任务的前提和基础保障。当前船艇上广泛使用的GPS、罗兰、“北斗”等无线电导航定位系统均对电磁波媒介的依赖程度很高,在复杂电磁环境下将受其影响,产生一定的定位误差[2]。陆标定位是通过利用磁罗经、六分仪,测定若干个所观测物标的磁方位、物标之间的夹角大小以及物标高度来确定船位[3],其定位原理是与电磁环境无关的平面几何原理,但传统的陆标定位采用人工观测、手工绘算的方式,在纸制海图上标绘船位点,所以定位速度缓慢,精度不高。随着电子信息和传感器技术的发展,陆标定位也可以逐渐向自动化、数字化方向发展。
本文提出了一种新的船艇导航系统,系统主要通过高清度摄像机和磁航向传感器获取观测物标的方位以及两物标的夹角等信息,由串口送至计算机处理,计算分析后可以得出船艇航行数据,包括航向、航速、经纬度等。该系统的完成,可以有效地解决船艇在复杂电磁环境下的导航问题,也为当前许多船载的信息化作战系统输入相对准确的船位信息,因而有着良好的应用前景和军事效益。
2 系统构成
新型船艇导航系统主要由“绘算部分”与“观测部分”两大部分组成[4],其中观测部分包括伺服平台、图像传感设备、测角系统、推算系统等,绘算部分包括多源信息融合中心以及电子海图上层软件。其整体结构框图如图1所示。

图1 系统组成框图Fig.1 The system composition block diagram
图1 中,图像传感设备和测角系统安装在伺服平台之上,整体固定安装在船艇指挥台上视野空旷的位置,图像传感设备用于采集并实时传输当前视景范围内的图像信息;伺服平台用以控制图像传感设备的水平转动和高低俯仰;测角系统用于对图像传感器中轴线当前所处位置的水平旋转、高低俯仰等信息进行实时的采集与测量;推算系统安装于伺服平台底部的船艇首尾线方向上,用于检测船艇首尾方向和左右舷方向上的累积对地位移,结合测角系统中磁航向传感器所提供的航向信息[5],从而计算出推算船位。
多源信息融合中心是一套以军用工控机为平台研制的集数据采集、处理与远程控制于一体的硬件设施,安装于驾驶室内,通过数据线路控制伺服平台的旋转和俯仰,而伺服平台所承载的高分辨率图像传感设备的中心轴舷角、垂直高度角、当前船艇磁航向、视野场景数码图像等信息,也通过数据线路实时传递到多源信息融合中心,由安装于军用工控机内的采集卡和解码器等设备完成船艇磁航向、物标舷角、数据图像等信息的自动化处理,并在人工用鼠标标定基准点的情况下,迅速计算出当前船艇所处的位置,在电子海图上自动标绘。系统设备组成如图2所示。

图2 系统设备组成Fig.2 The composition of equipment
3 测量物标夹角的基本原理
本系统在获取物标之间的水平角时采用了“一次成像法”。所谓“一次成像法”就是针对小于70°的物标夹角,通过一次成像的方式,获取两个物标在同一幅数码照片里所处的位置,通过计算,得到两个物标之间的夹角。这种方法与传统的测角法相比,能够最大程度上消除分步测量所带来的动态误差,并且只需要两个待测物标同时出现在成像范围之内即可,对瞄准的准确度要求不高,却能保证较好的测量精度。“一次成像法”的理论推导可通过图3说明。
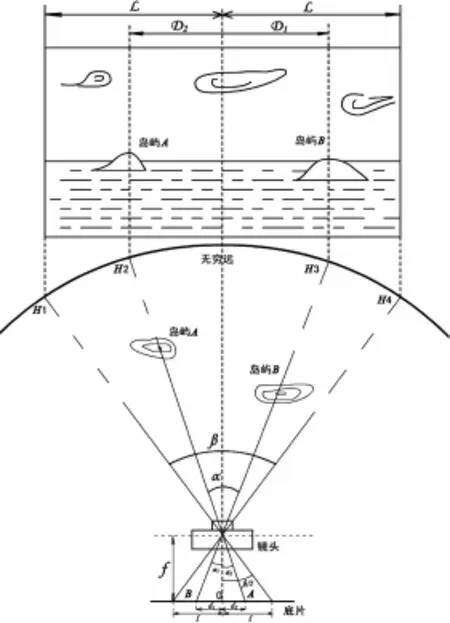
图3 一次成像法角度测量原理图Fig.3 The principle of angle measurement with once imaging
图3中,物标A、物标B与相机的相对位置关系如图所示。利用相机对物标A、物标B进行一次成像,则图中物标A、物标B在镜头后面底片上的成像点分别为A点和B点,假定这两点与底片中心线之间的横向距离分别为d2和d1,底片中心线到底片横向外沿的距离为l,那么根据图示不难得出
也

对应到相片中的场景,不难得到

式中,L为数码相片横向象素点数量,D1、D2为相片中物标点偏离相片中心线的象素点数量,β角可以预先测量得到。所以,要测量物标A、物标B相对于摄像机镜头的夹角大小,只需要在事先测得β角的前提下,从数码相片上量出物标A、物标B的像偏离相片中心线的象素点值,即可根据上述公式计算出α角的大小。
4 系统的硬件设计
本系统硬件主要由伺服转台和固定模块两大部分组成。
4.1 伺服转台
伺服转台是本系统的核心部分,它安装在船艇指挥台视野空旷的位置,其主要作用是在船艇航行过程中承载由高清度透雾摄像机和红外镜头组合而成的视频系统快速、准确地指向灯塔、航标等助行标志,并实时回传视频中轴线相对于船首方向的夹角,为船艇进行快速定位提供关键信息。
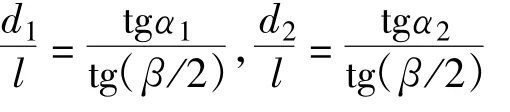
伺服转台主要由方位座和俯仰包两部分组成,包括方位轴系、俯仰轴系、驱动器、编码器、轴承、汇流环、限位装置、电子线路以及密封环节等。系统的总体结构如图4所示。
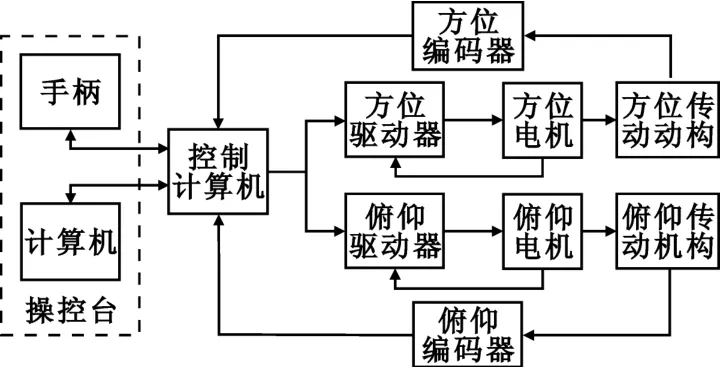
图4 转台模块设计图Fig.4 The design of turntable module
平台的方位和俯仰传动机构由支座、滚珠轴承、空心轴等组成,在其上安装有电机转子和角度测量单元,在俯仰传动轴上固定有支架,用于安装透雾摄像机和红外镜头等组件。通过支架调整装置进行调整以达到传感器光轴与俯仰轴垂直。球型头由方位轴支撑,其俯仰方向的旋转由俯仰伺服传动电机驱动。方位轴中嵌有小型汇流环,汇流环保证经过方位机械传动实现内外部电气(电源、操控、状态、视频)信息的互连。方位、俯仰轴系通过密封环节严密水密,球形本身严格气密,以保证内部各元器件的正常工作。
4.2 固定模块
由于传统的磁罗经无法直接输出航向电信号,若要提供航向信息,必须利用磁场传感器直接敏感周围磁场,把随外界磁场变化的感应信号进行处理后,直接输出罗经航向,即电子磁罗经。本系统中固定模块指的就是电子磁罗经及安装在船艇首尾和正横方向上的一组加速度计,分别用来传感船艇罗航向和船艇水平加速度,以供推算船位使用。电子磁罗经主要包括磁性传感器(如图5所示)和船载磁罗经。

图5 磁性传感器Fig.5 The magnetic heading sensor
电子磁罗经的核心部分是磁性传感器,不同工作原理的磁传感器构成了不同类型的罗经。目前在航海上应用的磁性传感器种类很多,主要有线圈式的、基于霍尔效应原理的、磁通门效应原理的、磁阻效应原理的和巨磁电阻效应原理的传感器,它们可以检测磁场的大小、方向,确定载体的角度、位置和位移等参量。本系统中采用EZ-COMPASS磁航向传感器作为相机中轴线磁方位信息的传感器,该型磁航向传感器具备软硬铁补偿算法,倾角重复精度0.05°,方位测量精度小于0.5°,能够满足航海绘算对物标磁方位精度的要求。
5 系统的软件设计
软件系统包括伺服转台中下位机软件和多源信息融合中上位机软件。下位机的软件设计包括双串口接收数据、数据预处理、RS232数据通信,上位机软件设计包括RS232端口的驱动程序和船位融合算法的实现。
5.1 软件整体流程
本系统通过RS232通信实现下位机的数据和上位机数据交互。下位机软件主要实现如下功能:根据不同的指令进行相应的操作控制;完成平台内部的数据处理功能;建立RS232数据包发送所测数据。上位机软件实现RS232接口的驱动,解算从磁传感器和加速度计传过来的数据和Kalman滤波器模型的建立。根据读取的RS232数据包中的标识,判定该数据包是推算定位数据还是陆标定位数据,如果是推算定位数据则先将该数据包保存起来以便和陆标定位数据结合起来作为Kalman滤波器的输入,之后进行推算定位数据解算;若是陆标定位数据,则将其和邻近的推算定位数据结合起来进行Kalman滤波。上位机的程序流程如图6所示。

图6 上位机软件流程图Fig.6 The flow chart of software in computers
5.2 船位的融合算法模型
系统的定位方法有两种,一种是通过推算船位,另一种是通过陆标定位。这两种定位方法各有所长,并具有互补性,如将它们组合起来可形成优势互补,使定位在短期和长期精度上都有保证,但在组合定位中应用最广泛的信息融合算法就是卡尔曼滤波[6]。基于卡尔曼滤波的组合导航系统的总体结构如图7所示。
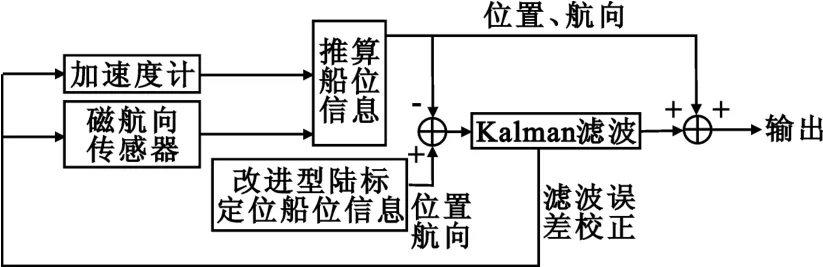
图7 卡尔曼滤波算法模型Fig.7 The model of Kalman filtering hybrid algorithm
其工作原理是:航迹推算系统利用磁航向传感器、加速度计测量的航向和航速信息确定船艇的位置、航速和航向。当陆标定位定位条件好时,航迹推算系统和陆标定位导航信息都输入综合卡尔曼滤波器中,以航迹推算系统的误差作为组合导航系统的状态,通过卡尔曼滤波估计出航迹推算系统的误差,然后用估计出的误差修正航迹推算系统[7]。当陆标定位的条件不满足时,转入航迹推算系统单独工作。由于经组合滤波后测量元件的误差己被校正,因此单独使用航迹推算系统可以在较长时间内保持一定精度,并且系统整体精度比较高。
6 海上试验与结果分析
本系统在海上试验主要有两个目的:一是通过本系统所测得船位与GPS所测得船位相比来检验误差大小;二是通过本系统单独使用陆标定位与综合使用分别进行定位,与GPS测得船位相比,看误差有多大,以检验系统中数据融合算法是否正确。为此,我们在舟山本岛以东的中街山列岛附近进行了海上试验。试验航行海区和计划航线如图8所示。

图8 海上试验航行海区及计划航线Fig.8 The area and planned route of sea trials
试验船艇08∶00从长途港出发,经过40 min的航行,于08∶40到达试验计划航线的第一个航路点(φ30°12′08″N,λ122°25′17″E),按照计划航向和航速航行,每隔30 s分别用GPS、本组合导航系统和本系统中单独使用陆标定位,分别得出3条航迹线,如图9所示,误差曲线图如图10所示。
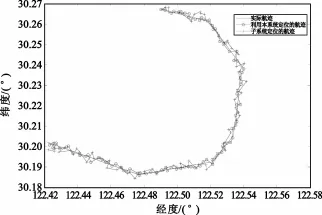
图9 不同导航定位方法所测得的航迹图Fig.9 The voyage chart with different navigation methods

图10 误差曲线图Fig.10 The error curve
从图10可知,采用本系统的误差比单独用陆标定位的方法有明显的提高(采用本组合系统定位误差在200 m以内,单个系统定位误差在400 m以内)。本组合系统实时给出了船艇的位置信息,保证了定位的连续性,又达到了较高的精度。同时,组合系统在可靠性方面比单独采用陆标定位的方法更有优势。
7 结论
针对复杂电磁环境下现有的船艇导航定位系统易受干扰等难题,本文提出并实现了一种以不受电磁干扰的传统定位理论为基础的新型船艇导航系统。海上实验表明,该系统性能稳定,程序结构设计合理,定位精度能够满足军事航海上的要求。但研究中也发现,采用信息融合算法中采用传统的卡尔曼滤波存在滤波发散倾向,这样常使滤波器发散失去作用,从而影响定位精度,下一步将研究如何采用其他数据融合算法抑制滤波器发散的问题。
[1]刘尚合,孙国至.复杂电磁环境内涵及效应分析[J].装备指挥技术学院学报,2008,19(1):1-5. LIU Shang-he,SUN Guo-zhi.Analysis of the Concept and Effects of Complex Electromagnetic Environment[J].Journal of the Academy of Equipment Command&Technology,2008,19(1):1-5.(in Chinese)
[2]丁岚.复杂电磁环境对舰载作战系统的影响分析[J].舰船科学技术,2011,33(增刊):100-101. DING Lan.Impact analysis of complex electronagnetic environment on ship borne combat system[J].Ship Science and Technology,2011,33(Supplement):100-101.(in Chinese)
[3]智利民.航海学[M].北京:解放军出版社,2004. ZHI Li-min.Marine Navigation[M].Beijing:PLA Publishing House,2004.(in Chinese)
[4]赵柯.一种船舶定位装置:中国专利,ZL 2012 2 0196948.5[P].2013-01-23. ZHAO Ke.One Ship Positioning Device:Chinese Patent,ZL 2012 2 0196948.5[P].2013-01-23.(in Chinese)
[5]程全,樊宇.磁航向传感器的应用与分析[J].煤炭技术,2011,30(4):152-153. CHENG Quan,FAN Yu.On Application and Analysis of Magnetic Heading Sensor[J].Coal Technology,2011,30(4):152-153.(in Chinese)
[6]彭冬亮,文成林,薛安克.多传感器多源信息融合理论及应用[M].北京:科学出版社,2010:125-128. PENG Dong-liang,WEN Cheng-lin,XUE An-ke.Multisensor Information Fusion Theory with Applications[M].Beijing:Science Press,2010:125-128.(in Chinese)
[7]董艳婷,张敬堂.组合定位中信息融合算法的研究[J].信息工程大学学报,2007,4(8):490-492. DONG Yan-ting,ZHANG Jing-tang.Research on information fusion in integrated localization systems[J].Journal of Information Engineering University,2007,4(8):490-492.(in Chinese)
ZHANG Chang-hui was born in Jixi,Anhui Province,in 1981.He received the M.S.degree from Wuhan University in 2010.He is now a lecturer.His research concerns watercraft maritime technology.
Email:stronglight@163.com
魏旭冠(1963—),男,江苏泰州人,1985年于上海海事学院获学士学位,现为教授,主要从事计算机技术在军事航海上的应用研究。
WEI Xu-guan was born in Taizhou,Jiangsu Province,in 1963. He received the B.S.degree from Shanghai Maritime College in 1963.He is now a lecturer.His research concerns application of computer technology in military navigation.
A New Watercraft Navigation System Applied in Complex Electromagnetic Environment
ZHANG Chang-hui,WEI Xu-guan
(Zhenjiang Watercraft College of PLA,Zhenjiang 212003,China)
Complex electromagnetic environment is the most outstanding characteristic of future informatization battle field,and it will interfere with the existing navigation system depending on the radio waves.In order to solve the problem of the navigation under the complex electromagnetic environment effectively,a new watercraft navigation system based on terrestrial fixing is proposed.The system captures the data of positioning objects through high definition camcorders and magnetic heading sensors,and then displays the information on the electronic chart after computer processing.The trial on the sea shows that the system goes far beyond the traditional terrestrial fixing in the aspect of time and accuracy.It can completely meet the requirement of military navigation and will definitely have good benefit.
military marine;complex electromagnetic environment;watercraft navigation system;terrestrial fixing;high definition camcorder;magnetic heading sensor
The Scientific Research Project of Weapon Equipment([2008]447)
date:2013-04-02;Revised date:2013-06-24
武器装备科研计划资助项目(陆装[2008]447号)
❋❋通讯作者:stronglight@163.comCorresponding author:stronglight@163.com
TN967.7
A
1001-893X(2013)09-1126-05

张长辉(1981—),男,安徽绩溪人,2010年于武汉大学获硕士学位,现为讲师,主要从事船艇航海技术研究;
10.3969/j.issn.1001-893x.2013.09.002
2013-04-02;
2013-06-24
