水下航行器折叠翼展开机构设计与动力学仿真
2013-05-28冯潇涛
雷 歌, 邓 飞, 刘 权, 冯潇涛
水下航行器折叠翼展开机构设计与动力学仿真
雷 歌, 邓 飞, 刘 权, 冯潇涛
(西北工业大学 航海学院, 陕西 西安, 710072)
为了适应水下航行器发射装置的尺寸限制, 满足水下航行器发射后的稳定性要求, 设计了一种水下航行器折叠翼展开机构。在对该机构进行力学分析的基础上, 建立了折叠翼展开过程动力学模型, 并通过数值仿真, 讨论了扭转展开机构设计参数和发射动力学参数等对折叠翼展开动力学特性的影响, 验证了机构设计的可行性与可靠性。该研究结果可对进一步优化和改进水下航行器折叠翼的设计方案提供参考。
水下航行器; 折叠翼; 机构设计; 动力学仿真
0 引言
由于受限于发射装置尺寸, 有些水下航行器的鳍、翼必须采用可折叠、展开的结构形式。如某些自行出管水雷、水下运载器等。此类水下航行器由于其流体动力及水下弹道特性, 往往具有相对尺寸(相对于其主体圆柱)较大的鳍、翼结构。在利用常规或通用水下发射装置(如鱼雷发射管)等进行装载与发射时, 要求其在管内处于折叠状态, 而在发射出管时能够自动展开与定位。一般要求展开机构在不同的发射出管速度、发射姿态(攻角、侧滑角、横滚角)、发射环境(发射平台运动状态、海流、海浪)等条件下, 能够保证快速展开并定位锁紧, 并对翼面展开过程、展开到位时的瞬时角速度、角加速度等有一定要求, 以保证不因冲击过载太大对航行器母体产生大的干扰。
目前常采用的鳍、翼折叠方式有缩进弹出式与折叠展开式2种[1-2]。其中第1种方式适用于弹体直径相对较大, 内部空间足够布置连杆机构等弹出装置的航行器。相对而言, 这种方式设计简单、可靠, 对航行器运动干扰最小。而第2种方式则恰好相反, 适用于水下航行器的弹体直径相对较小或弹体内部空间不易布置弹出机构, 而采用翼面折叠、展开机构。水下运载器常采用第2种方式。对于此类机构的设计, 航行器及发射平台的运动速度、姿态等流体动力参数对折叠翼面展开过程的影响是必须首先考虑的设计因素与设计指标。本文基于航行器折叠稳定翼结构设计与力学特性分析, 建立了其展开过程的动力学模型, 进行了数值仿真, 讨论了扭转展开机构设计参数、发射动力学参数等对折叠翼展开特性的影响。
1 折叠翼机构设计
折叠翼机动翼面由收起状态向工作状态转化是通过紧固—打开—固定这一套运动机构来实现的。储存及装管状态下, 折叠翼活动端由紧固机构固定在折叠状态, 扭簧被预紧。当水下航行器需要折叠翼展开工作时, 紧固机构打开, 折叠翼活动端在扭簧作用下绕固定轴旋转打开。同时, 由于折叠翼活动端是在水下运动, 水会对其产生推动或阻碍作用, 在扭簧力与水动力共同作用下, 折叠翼展开, 当展开运动到位后由固定机构固定, 最终完成折叠翼紧固—打开—固定这一过程。
折叠方式选择: 此水下航行器折叠翼采用横向折叠式结构, 如图1所示, 此结构折叠翼绕着平行于航行器纵轴的一个轴进行折叠, 这种折叠方式机构简单, 且不占据航行器内部空间, 工作安全可靠, 比较适合于小展弦比翼型。
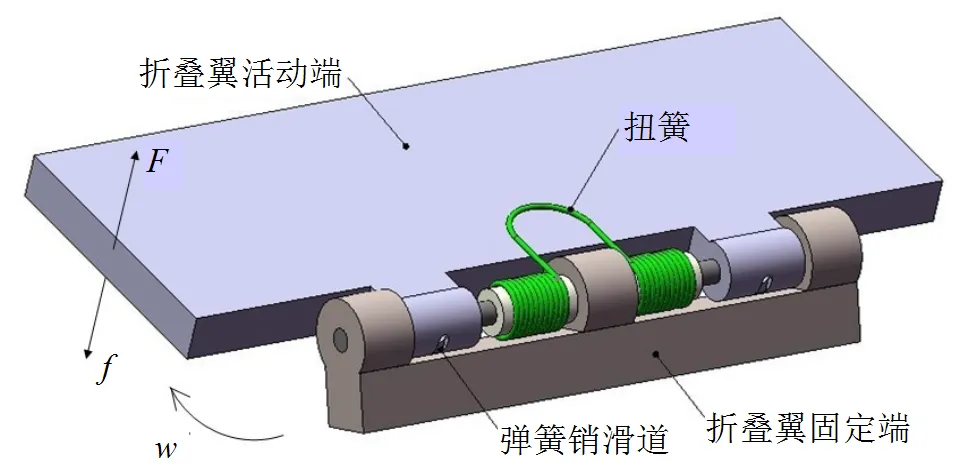
图1 折叠翼展开模型
驱动机构选择: 鉴于机动翼面的释放过程是从运动机构转换为锁定机构[3]这一不可逆的单次作用特征, 设计方案确定机构展开能量不采用主动动力源(如电机, 液压等), 而采用压簧装置, 拉簧装置, 扭簧装置, 扭杆装置等储能装置。本设计采用扭簧系统提供展开原动力, 在翼面折叠时, 扭簧扭紧储存一定的能量, 释放后, 机构在弹性势能的作用下展开。
固定机构选择: 采用弹簧销固定装置锁紧,为了便于弹簧销能有效地滑入销孔, 在折叠翼上增加一弹簧销滑道, 如图1所示, 当折叠翼展开到一定角度后, 弹簧销滑入滑道并持续展开到位后弹入销孔, 实现可靠固定, 使折叠翼能承载一定的水动力载荷, 保证航行器整体的流体外形。
2 折叠翼展开过程动力学建模
2.1 活动端法向受力分析
折叠翼活动端的运动可以简化为折叠翼绕固定转轴的转动, 如图1所示, 折叠翼活动端法向受力决定其运动状态。活动端展开过程中受重力、浮力, 扭簧扭转力以及水动力的共同作用[4]。
重力与浮力之差称为负浮力, 它在活动端法向的分量相对较小, 可忽略不计。
扭簧提供的扭转力时刻与转轴垂直, 且沿着折叠翼的展开方向, 是折叠翼展开的原动力。

2.2 活动端法向受力及力矩计算
2.2.1 扭簧力矩
本文采用双扭簧机构提供折叠翼驱动展开能量, 这里设计2种不同截面直径的扭簧来讨论不同扭转展开机构设计参数对折叠翼展开特性的影响。
1) 估取弹簧丝直径=6 mm
==36 mm (1)
根据强度条件试算最大工作扭矩

取=16.5, 则扭簧的扭转刚度


双扭簧扭矩

2) 估取弹簧丝直径=4 mm

根据强度条件试算最大工作扭矩


取=15.5, 则根据式(4)得双扭簧扭矩

2.2.2 水作用在活动端表面法向上的力
1) 位置力: 折叠翼所受位置力主要与航行器速度、航行器的方位角、发射平台运动参数、海流等环境参数所引起的当地攻角有关。本文根据工程实际工况估算, 为了保证折叠翼在较恶劣的发射工况下能够顺利打开, 选取-5°当地攻角进行仿真分析。
活动端位置力和位置力矩采用计算流体力学方法进行数值计算。本文计算航行器在15 m/s的速度下以-5°攻角运动时折叠翼活动端法向的受力, 将折叠翼展开过程分为若干个定常状态进行仿真, 在仿真计算折叠翼的非定常展开运动时, 位置力和位置力矩可通过对此计算结果进行插分得到, 计算结果和拟合方程见表1。模型网格划分如图2, 计算模型对称面速度云图如图3所示。

表1 折叠翼活动端所受位置力
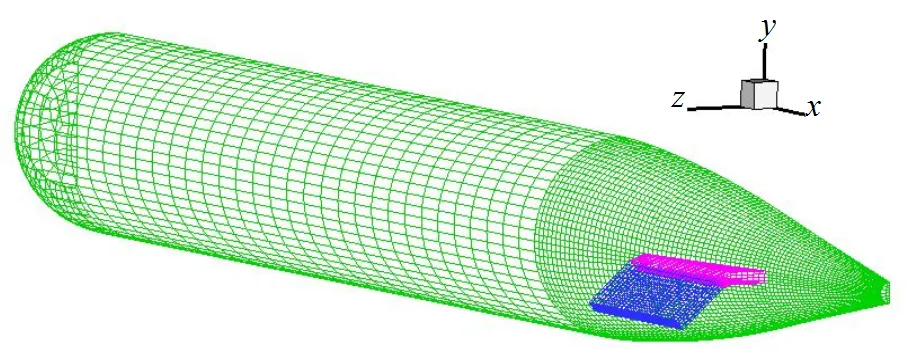
图2 折叠翼展开30°的网格图

图3 -5°攻角翼展开30°对称面速度云图
2) 阻尼力: 折叠翼在展开的过程中活动端随航行器不仅做直线平移运动, 而且还伴随着旋转运动, 这时水动力将对折叠翼产生阻尼力作用, 且方向始终与折叠翼展开方向相反, 是阻碍活动端展开的力。
由于活动端距离旋转轴不同位置处具有不同速度, 采用积分方法[6]求解活动端所受水的阻力。如图4水平翼阻尼力分析所示, 距离旋转轴, 宽度为d的单位活动端受粘性阻力和力矩为



式中:为水以垂直于平板表面方向流经平板时的阻力系数;为水的密度;为活动端转动角速度。

对整个翼长进行积分, 得

式中:为转轴中心到翼顶端的高度;为转轴半径;为翼所受流体动力作用点到轴中心的距离。

图4 阻尼力分析

图5 附加质量力分析
2.3 建立折叠翼展开动力学方程

定义活动端展开旋转方向为正, 则有

式中:为作用在扭簧转轴中心的动量矩;为作用在扭簧转轴中心的全部外力矩。
3 仿真结果与分析
3.1 仿真参数

3.2 动力学计算结果与分析
根据以上仿真条件编写Matlab程序对活动端展开过程进行计算, 仿真结果如图6~图9所示。
图6为M扭簧在零攻角时的展开曲线, 从图中可以看出, 折叠翼在0.086 s时完全展开, 由展开角速度曲线可以看出, 展开角加速度逐渐减小, 在展开过程末段, 角速度趋于稳定, 达到近似平衡过程。图7为M扭簧在-5°攻角时的展开曲线, 同无攻角时的展开曲线图6相比, 由于粘性位置力f的存在, 其完全展开需要更长的时间, 完全展开时的角速度也较无攻角时的角速度小。

图6 Ma扭簧零攻角展开过程

图7 Ma扭簧-5°攻角展开过程

图8 Mb扭簧零攻角展开过程

图9 Mb扭簧-5°攻角展开过程
图8为M扭簧在零攻角时的展开曲线, 其完全展开所需的时间为0.152 s, 这与使用M扭簧在零攻角发展规律是相似的。图9为M扭簧在-5°攻角时展开过程, 可以看到, 由于扭簧的扭矩偏小, 在存在位置阻力的情况下, 折叠翼不能完全展开, 在43°附近处于震荡平衡状态。
通过以上分析可以得出如下结论。
1) 在航行器发射姿态处于零攻角状态时, 不考虑粘性位置阻力的影响(如同在静水中), 折叠翼展开过程主要决定于主动扭转力矩, 并且均能实现完全展开, 只是展开时间不同。因此尽量保证小于当地攻角的发射条件, 会大大降低折叠翼的设计难度, 且折叠翼可实现顺利展开。
2) 在航行器发射姿态处于非零攻角状态时,粘性位置阻力是影响折叠翼展开过程的主要影响因素, 当展开机构的主动扭转力矩设计值小于某一极限值时, 将会出现折叠翼不能完全展开, 在某一角度位置保持持续震荡的近似平衡过程。
4 结束语
本文对水下航行器折叠翼固定机构、驱动机构以及折叠方式进行方案选择, 完成了折叠翼机构设计。通过分析计算折叠翼活动端展开过程所受各力, 建立了折叠翼展开过程动力学方程。运用MATLAB对折叠翼展开过程进行动力学仿真计算, 获得了扭转展开机构设计参数、发射动力学参数对折叠翼展开动力学特性的影响规律。本文的研究结果对进一步优化[7]和改进水下航行器折叠翼的设计方案具有重要的参考价值。
[1] 王党校. 折叠翼机构弹性动力学分析[D]. 西安: 西北工业大学, 2000.
[2] 冀功祥, 喻国兆. 水下航行器鳍折叠机构设计[J].水雷战与舰船防护, 2010, 18(1): 25-26.Ji Gong-xiang, Yu Guo-zhao. Folding Mechanism Design for Folding Fins of Underwater Vehicles[J]. Mine Warfare & Ship Self-Defence, 2010, 18(1): 25-26.
[3] 张元明, 张忠伟, 师小娟. 小型飞行器机动翼面的展开锁定机构设计[J]. 机械科学与技术, 2003(11):149-151. Zhang Yuan-ming, Zhang Zhong-wei, Shi Xiao-juan. Design of Pushing and Locking Mechanism of Maneuver-Control Surfaces for an Aircraft[J]. Mechanical Science and Technology for Aerospace Engineering, 2003(11):149-151.
[4] 徐宣志. 鱼雷力学[M]. 北京: 国防工业出版社, 1992.
[5] 濮良贵, 纪名刚. 机械设计[M]. 北京: 高等教育出版社, 2006.
[6] 张宇文. 鱼雷外形设计[M]. 西安: 西北工业大学出版社, 1992.
[7] 李莉, 任茶仙, 张铎. 折叠翼机构展开动力学仿真及优化[J]. 强度与环境, 2007, 34(1): 17-21.Li Li, Ren Cha-xian, Zhang Duo. Dynamic Simulation and Optimization Design of Deployment of Folding-wing [J]. Structure & Environment Engineering, 2007, 34(1): 17-21.
Design and Dynamic Simulation of Folding Wing Expansion Mechanism for Underwater Vehicle
LEI Ge, DENG Fei, LIU Quan, FENG Xiao-tao
(College of Marine Engineering, Northwestern Polytechnical University, Xi′an, 710072, China)
To adapt the size limit of an underwater vehicle launcher and meet the stability requirement of underwater vehicle after launching, an expansion mechanism of underwater vehicle folding wing is designed. Based on mechanical analysis, a dynamic model of the mechanism is established. The influences of the factors, such as the design parameters of the expansionmechanism and the parameters of launching dynamics, on the dynamic characteristics of this folding wing are obtained in different hydrodynamic conditions through numerical simulations. Simulation results confirm the feasibility and reliability of the mechanism design. This study may provide a reference for improving and optimizing design scheme of underwater vehicle folding wing.
underwater vehicle; folding wing; mechanism design; dynamic simulation
TJ630.2
A
1673-1948(2013)02-0081-05
2012-05-04;
2012-09-03.
雷 歌(1987-), 女, 在读硕士, 主要研究方向为船舶与海洋工程.
(责任编辑: 陈 曦)
